第十章 序列建模:循环和递归网络
2020-2-21 深度学习笔记10 - 序列建模:循环和递归网络 1(展开计算图,循环神经网络–经典 / 导师驱动 / 唯一单向量输出 / 基于上下文RNN建模)
双向RNN
传统的前馈RNN网络都有一个 ‘‘因果’’ 结构,意味着在时刻 t 的状态只能从过去的序列x(1),…,x(t−1) 以及当前的输入x(t) 捕获信息。 然而,在许多应用中,我们要输出的 y(t) 的预测可能依赖于整个输入序列。
例如,在语音识别中,由于协同发音,当前声音作为音素的正确解释可能取决于未来几个音素,甚至潜在的可能取决于未来的几个词,因为词与附近的词之间的存在语义依赖,如果当前的词有两种声学上合理的解释,我们可能要在更远的未来(和过去)寻找信息区分它们。这在手写识别和许多其他序列到序列学习的任务中也是如此。
双向循环神经网络(或双向 RNN)为满足这种需要而被发明。他们在需要双向信息的应用中非常成功,如手写识别,语音识别以及生物信息学。
顾名思义,双向RNN结合时间上从 序列起点开始移动的RNN 和 另一个时间上从序列末尾开始移动的RNN 。下图展示了典型的双向 RNN
1. 逻辑流程图 - 将输入序列映射到等长的输出序列
 其中
其中
- h(t) 代表通过时间向前移动的子 RNN 的状态
- g(t) 代表通过时间向后移动的子 RNN 的状态。
因此在每个点 t,输出单元 o(t) 可以受益于输入 h(t) 中关于过去的相关概要以及输入 g(t) 中关于未来的相关概要。
这允许输出单元 o(t) 能够计算同时依赖于过去和未来且对时刻 t 的输入值最敏感的表示,而不必指定 t 周围固定大小的窗口。

基于编码 - 解码的序列到序列结构
这一小节,我们将讨论RNN如何将一个输入序列映射到不等长的输出序列。这在许多场景中都有应用,如语音识别、机器翻译或问答,其中训练集的输入和输出序列的长度通常不相同。
我们经常将RNN的输入称为“上下文”。我们希望产生此上下文的表示C。这个上下文C可能是一个概括输入序列 的向量或者向量序列,即神经网络的隐层高维度向量。
实际上,输入长度和输出长度不一致的神经网络并不罕见,DNN和CNN中这种情况都非常常见(例如将图像输入得到手写数字输出),实现这一能力的核心思想就是增加 1 个及以上的隐层,对于RNN也是一样的,隐层起到信息压缩和解压缩的承上启下作用。
这种架构称为编码-解码或序列到序列架构。如下图所示:

这个结构实际上是由两个RNN结构拼接组成的。
(1) 编码器(encoder)或读取器(reader)或输入 (input) RNN 处理输入序列。编码器输出上下文C(通常是最终隐藏状态的简单函数),C表示输入序列的语义概要;
(2) 解码器(decoder)或写入器 (writer)或输出 (output) RNN 则以固定长度的向量(即上下文C)为条件产生输出序列 。
在序列到序列的架构中,两个 RNN 共同训练以最大化 (训练集中所有 x 和 y 对的损失)。
编码器 RNN 的最后一个状态 通常被当作输入的表示 C 并作为解码器 RNN 的输入。
计算循环神经网络的梯度
循环神经网络中,关于各个参数计算这个损失函数的梯度是计算成本很高的操作。
通过将RNN的计算图展开后可以清楚地看到,梯度计算涉及执行一次前向传播,接着是由右到左的反向传播。运行时间是 O(τ),并且不能通过并行化来降低,因为前向传播图是固有循序的,每个时间步只能一前一后地计算。前向传播中的各个状态必须保存,直到它们反向传播中被再次使用,因此内存代价也是 O(τ)。
应用于展开图且代价为 O(τ) 的反向传播算法称为通过时间反向传播(back-propagation through time, BPTT),隐藏单元之间存在循环的网络非常强大但训练代价也很大。
1.举例说明BPTT计算过程
以之前讨论的例子为例计算梯度【经典RCNN】:

计算图的节点包括参数 U, V, W, b 和 c,以及以 t 为索引的节点序列 x(t), h(t), o(t) 和 L(t)。
对于每一个节点 N,我们需要基于 N 后面的节点的梯度,递归地计算梯度 ∇NL。我们从紧接着最终损失的节点开始往回递归:
在这个导数中,我们假设输出 o(t) 作为 softmax 函数的参数,我们可以从 softmax函数可以获得关于输出概率的向量
。我们也假设损失是迄今为止给定了输入后的真实目标 y(t) 的负对数似然。对于所有 i, t,关于时间步 t 输出的梯度
如下:

我们从序列的末尾开始,反向进行计算。在最后的时间步 τ, h(τ) 只有 o(τ) 作为后续节点,因此这个梯度很简单:

然后,我们可以从时刻 t = τ − 1 到 t = 1 反向迭代,通过时间反向传播梯度,注意h(t)(t < τ) 同时具有 o(t) 和 h(t+1) 两个后续节点。因此,它的梯度由下式计算:
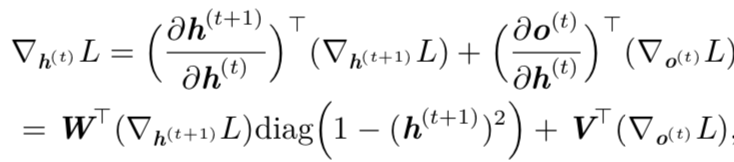
其中
表示包含元素
的对角矩阵。
一旦获得了计算图内部节点的梯度,我们就可以得到关于参数节点的梯度。
因为参数在许多时间步共享,我们必须在表示这些变量的微积分操作时谨慎对待。我们希望使用 bprop 方法计算计算图中单一边对梯度的贡献。然而微积分中的 算子,计算 W 对于 f 的贡献时将计算图中的所有边都考虑进去了。为了消除这种歧义,我们定义只在 t 时刻使用的虚拟变量 W(t) 作为 W 的副本。然后,我们可以使用 表示权重在时间步 t 对梯度的贡献。
使用这个表示,计算节点内部参数的梯度可以由下式给出:
 因为计算图中定义的损失的任何参数都不是训练数据
的父节点,所以我们不需要计算关于它的梯度。
因为计算图中定义的损失的任何参数都不是训练数据
的父节点,所以我们不需要计算关于它的梯度。
