算法探秘(一)动态规划法解决TSP,多段图路径,0/1背包问题,最长公共子序列,二叉查找树问题
引言
背景
- 为什么要动态规划:为研究最优化问题提出的概念,是一种求解多阶段决策最优化问题的工具。
- 优势:将每个子问题只求解一次并保存在表中,下次查表获得解,免去重复计算。
相关概念
1.最优化问题
满足约束条件的解称为问题的可行解,这些标准通常以函数的形式给出,这些标准函数称为目标函数,使目标函数取得极值(极大或极小)的可
行解称为最优解,这类问题就称为最优化问题。
2.多阶段决策
前一阶段决策所采取的动作,成为下一阶段决策的依据。决策序列在不断变化的状态中产生。这个决策序列产生的过程称为多阶段决策过程。

3.最优性原理
各子问题的解只与其前面的子问题的解相关,且各子问题的解都是相对于当前状态的最优解,整个问题的最优解由各个子问题的最优解构成。
4.动态规划法的设计思想
将子问题的解求解一次并填入表中。当需要再次求解此子问题时,可以通过查表获得该子问题的解而不用再次求解,从而避免了大量重复计算。
接下来我们分析图问题,组合问题和查找问题三类问题中动态规划法的应用。
图问题中的动态规划
TSP问题
1.问题定义
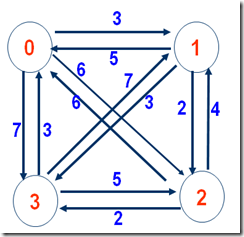
TSP问题是指旅行家要旅行n个城市,要求各个城市经历且仅经历一次然后回到出发城市,并要求所走的路程最短。(在有向带权图G=<V,E>中,寻找路径最短的哈密尔顿问题。)
假设现在有四个城市,0,1,2,3,他们之间的代价如图一,可以存成二维表的形式
2.引入方程
-
d(i,V’):从顶点i出发经过V’(是一个点的集合) 中各个顶点一次(
V’中的点是已经经过的点集),最后回到出发点s的最短路径长度。当V’为空集,那么
d(i,V’),表示从i不经过任何点就回到s。
-
Cik表示你选择的城市
k和城市
i的距离,
d(k,V’−k)是一个子问题
- TSP的动态规划函数(递推式)为:
d(i,V−i)=d(i,V’)=min{cik+d(k,V’-k)}(k∈V’)

3.建立表格

eg.d(1,{2})=c12+d(2,{})=2+6=8(1→2)说明:j是要回s要经过但还没经过的点集,为空代表不经过任何点就回到s。

小感悟
大块的最优依赖小块的最优,先解小块,再出大块,最后选定最优解。
多段图的最短路径
1.问题定义
设
G=(V,E)是一个赋权有向图,其顶点集
V被划分为
k(k>2)个不相交的子集
Vi(1≤i≤k),其中,
V1和
Vk分别只有一个顶点
s(称为源)和一个顶点
t(称为汇),所有的边
(u,v)的始点和终点都在相邻的两个子集
Vi和
Vi+1中:
u∈Vi,v∈Vi+1, 且边
(u,v)有一个正权重,记为
ω(u,v).请设计一个算法,求解从源s到汇t的权重之和最小的路径。

2.引入方程
-
(u,v):多段图的边
-
cuv:边上的权值
-
d(s,t):从源点
s到终点t的最短路径记为,则从源点0到终点9的最
短路径
d(0,9)由下式确定:
d(0,9)=minc01+d(1,9),c02+d(2,9),c03+d(3,9)
............
分析思路同TSP问题。
组合问题中的动态规划法
0/1背包问题
1.问题定义
给定
n种物品和一个背包,物品
i(1≤i≤n)的重量是
ωi,其价值是
vi ,背包的容量为
C,对于每种物品只有两种选择,即装入背包或不装入背包。问题是如何选择装入背包的物品使得装入背包的物品的总价值最大?
2.引入方程
最优解方程
⎩⎪⎪⎨⎪⎪⎧i=1∑nωixi≤Cxi∈{0,1}(1≤i≤n)
maxi=1∑nvixi
价值方程
1.背包不足以装入物品
i,则装入前
i−1个物品所得到的最大价值相等,即
xi=0,背包不增加任何价值。
2.背包容量可以装入物品
i,此时可能存在两种情况,即考虑装与不装?
-
若把第
i个物品没有被装入背包,则与第一种情况相同
-
若把第
i个物品装入背包,则背包中物品的总价值等于把前
i−1个物品装入容量为
j−ωi的背包中得到的最大价值加上第
i个物品装入背包的价值
vi,公式如下:
V(i,j)={V(i−1,j)max{V(i−1,j),V(i−1,j−ωi)+vi}j<wij≥ωi
范例
例如,有5个物品,其重量分别是
2,2,6,5,4,价值分别为
6,3,5,4,6,背包的容量为10,根据动态规划函数,用一个
(n+1)×(C+1)的二维表
V,
V[i][j]表示把前i个物品装入容量为j的背包中获得的最大价值。以物品数为阶段进行计算:
eg.第三阶段(i=3)的子问题容量j=8>6=ω3可以装入,对应于情况2此时:max{V[2][8]=9,V[2][2]+5=11}
以此类推,计算出每一阶段的,最后取得最大值如下表。

最长公共子序列问题
1.问题定义
- 子序列(递增,非连续性):对给定序列
X=(x1,x2,…,xm)和序列
Z=(z1,z2,…,zk),
Z是
X的子序列当且仅当存在一个严格递增下标序列
(i1,i2,…,ik),使得对于所有
j=1,2,…,k,有
zj=xij(1≤ij≤m)。
- 子序列(公共):另一个序列Z既是X的子序列又是Y的子序列即为公共子序列。
2.例题
例:序列
X=(a,b,c,b,d,b),
Y=(a,c,b,b,a,b,d,b,b),建立两个
(m+1)×(n+1)的二维表
L和表
S,分别存放搜索过程中得到的子序列的长度和状态。先初始化第一行第一列,以每行(或列)为一个阶段,向后递推:最后字符相等,左上角加1填入,否则上方和左方的取大填入.
.引入方程
L[i][j]表示子序列
Xi和
Yj的最长公共子序列的长度,可得如下动态规划函数:
L[0][0]=L[i][0]=L[0][j]=0(1≤i≤m,1≤j≤n)
L[i][j]={L[i−1][j−1]+1max{L[i][j−1],L[i−1][j]}xi=yi,i>1,j>1xi=yi,i>1,j>1
- 填数字的方法:
⎩⎪⎪⎨⎪⎪⎧看左上,左=右取大值看左上,左=上看横纵{+1(横=纵)不变(横=纵)

- 找最长子串的方法:
⎩⎪⎪⎨⎪⎪⎧看左上{左移(左=中)上移(上=中)看左上,左=中&&上=中:对角线移

查找问题中的动态规划法
最优二叉查找树(查找过程中动态生成表)
二叉查找树
根节点的值大于其左子树中任意一个节点的值,小于其右子树中任意一节点的值
2.问题定义
- 二叉查找树定义
将由
{r1,r2,…,rn}构成的二叉查找树记为
T(1,n),其中
rk(1≤k≤n) 是
T(1,n)的根结点,则其左子树
T(1,k−1)由
{r1,…,rk−1}构成,其右子树
T(k+1,n)由
{rk+1,…,rn}构成。

- 最优解方程:设
r1,r2,…,rn是
n个记录的集合,其查找概率分别是
p1,p2,…,pn,最优二叉查找树是以这
n个记录构成的二叉查找树中具有最少平均比较次数的二叉查找树,即:
i=1∑npi∗ci
最小,其中
pi是记录
ri的查找概率,
ci是在二叉查找树中查找
ri的比较次数。
3.例题
放个小图,自己理会:

4.动态规划函数
T(i,j):记录
ri,…,rj(1≤i≤j≤n)构成的二叉查找树
rk:二叉查找树的根结点
C(i,j):
T(i,j)这棵树的平均比较次数
方程如下:
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧C(i,j)=mini≤k≤j{C(i,k−1)+C(k+1,j)+s=i∑jps}C(i,i−1)=0(1≤i≤n+1)C(i,i)=pi(1≤i≤n)
例题
例如,集合{A, B, C, D}的查找概率是{0.1, 0.2, 0.4, 0.3},二维表C和R的初始情况如图所示:


近似串匹配问题
未完…待续…
超链接
更多相关内容:
TSP(旅行者问题)——动态规划详解
0/1背包问题
最长公共子序列问题,手把手演示求动态规划数组!
动态查找表(二叉排序树)
一个排版HTML的小常识:
CSDN博客排版技巧