
OpenCV2源码:
// OpenCVTest.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <stdio.h>
/*
* stereo_match.cpp
* calibration
*
* Created by Victor Eruhimov on 1/18/10.
* Copyright 2010 Argus Corp. All rights reserved.
*
*/
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/contrib/contrib.hpp"
using namespace cv;
static void print_help()
{
printf("\nDemo stereo matching converting L and R images into disparity and point clouds\n");
printf("\nUsage: stereo_match <left_image> <right_image> [--algorithm=bm|sgbm|hh|var] [--blocksize=<block_size>]\n"
"[--max-disparity=<max_disparity>] [--scale=scale_factor>] [-i <intrinsic_filename>] [-e <extrinsic_filename>]\n"
"[--no-display] [-o <disparity_image>] [-p <point_cloud_file>]\n");
}
static void saveXYZ(const char* filename, const Mat& mat)
{
const double max_z = 1.0e4;
FILE* fp = fopen(filename, "wt");
for (int y = 0; y < mat.rows; y++)
{
for (int x = 0; x < mat.cols; x++)
{
Vec3f point = mat.at<Vec3f>(y, x);
if (fabs(point[2] - max_z) < FLT_EPSILON || fabs(point[2]) > max_z) continue;
fprintf(fp, "%f %f %f\n", point[0], point[1], point[2]);
}
}
fclose(fp);
}
int _tmain(int argc, _TCHAR* argv[])
{
const char* algorithm_opt = "--algorithm=";
const char* maxdisp_opt = "--max-disparity=";
const char* blocksize_opt = "--blocksize=";
const char* nodisplay_opt = "--no-display";
const char* scale_opt = "--scale=";
//if (argc < 3)
//{
// print_help();
// return 0;
//}
const char* img1_filename = 0;
const char* img2_filename = 0;
const char* intrinsic_filename = 0;
const char* extrinsic_filename = 0;
const char* disparity_filename = 0;
const char* point_cloud_filename = 0;
enum { STEREO_BM = 0, STEREO_SGBM = 1, STEREO_HH = 2, STEREO_VAR = 3 };
int alg = STEREO_SGBM;
int SADWindowSize = 0, numberOfDisparities = 0;
bool no_display = false;
float scale = 1.f;
StereoBM bm;
StereoSGBM sgbm;
StereoVar var;
//------------------------------
/*img1_filename = "tsukuba_l.png";
img2_filename = "tsukuba_r.png";*/
img1_filename = "01.jpg";
img2_filename = "02.jpg";
int color_mode = alg == STEREO_BM ? 0 : -1;
Mat img1 = imread(img1_filename, color_mode);
Mat img2 = imread(img2_filename, color_mode);
Size img_size = img1.size();
Rect roi1, roi2;
Mat Q;
numberOfDisparities = numberOfDisparities > 0 ? numberOfDisparities : ((img_size.width / 8) + 15) & -16;
bm.state->roi1 = roi1;
bm.state->roi2 = roi2;
bm.state->preFilterCap = 31;
bm.state->SADWindowSize = SADWindowSize > 0 ? SADWindowSize : 9;
bm.state->minDisparity = 0;
bm.state->numberOfDisparities = numberOfDisparities;
bm.state->textureThreshold = 10;
bm.state->uniquenessRatio = 15;
bm.state->speckleWindowSize = 100;
bm.state->speckleRange = 32;
bm.state->disp12MaxDiff = 1;
sgbm.preFilterCap = 63;
sgbm.SADWindowSize = SADWindowSize > 0 ? SADWindowSize : 3;
int cn = img1.channels();
sgbm.P1 = 8 * cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
sgbm.P2 = 32 * cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
sgbm.minDisparity = 0;
sgbm.numberOfDisparities = numberOfDisparities;
sgbm.uniquenessRatio = 10;
sgbm.speckleWindowSize = bm.state->speckleWindowSize;
sgbm.speckleRange = bm.state->speckleRange;
sgbm.disp12MaxDiff = 1;
sgbm.fullDP = alg == STEREO_HH;
var.levels = 3; // ignored with USE_AUTO_PARAMS
var.pyrScale = 0.5; // ignored with USE_AUTO_PARAMS
var.nIt = 25;
var.minDisp = -numberOfDisparities;
var.maxDisp = 0;
var.poly_n = 3;
var.poly_sigma = 0.0;
var.fi = 15.0f;
var.lambda = 0.03f;
var.penalization = var.PENALIZATION_TICHONOV; // ignored with USE_AUTO_PARAMS
var.cycle = var.CYCLE_V; // ignored with USE_AUTO_PARAMS
var.flags = var.USE_SMART_ID | var.USE_AUTO_PARAMS | var.USE_INITIAL_DISPARITY | var.USE_MEDIAN_FILTERING;
Mat disp, disp8;
//Mat img1p, img2p, dispp;
//copyMakeBorder(img1, img1p, 0, 0, numberOfDisparities, 0, IPL_BORDER_REPLICATE);
//copyMakeBorder(img2, img2p, 0, 0, numberOfDisparities, 0, IPL_BORDER_REPLICATE);
int64 t = getTickCount();
if (alg == STEREO_BM)
bm(img1, img2, disp);
else if (alg == STEREO_VAR) {
var(img1, img2, disp);
}
else if (alg == STEREO_SGBM || alg == STEREO_HH)
sgbm(img1, img2, disp);//------
t = getTickCount() - t;
printf("Time elapsed: %fms\n", t * 1000 / getTickFrequency());
//disp = dispp.colRange(numberOfDisparities, img1p.cols);
if (alg != STEREO_VAR)
disp.convertTo(disp8, CV_8U, 255 / (numberOfDisparities*16.));
else
disp.convertTo(disp8, CV_8U);
if (!no_display)
{
namedWindow("left", 1);
imshow("left", img1);
namedWindow("right", 1);
imshow("right", img2);
namedWindow("disparity", 0);
imshow("disparity", disp8);
imwrite("result.bmp", disp8);
printf("press any key to continue...");
fflush(stdout);
waitKey();
printf("\n");
}
return 0;
}
源码涉及到的三种算法:
- StereoBM bm;
- StereoSGBM sgbm;
- StereoVar var;
enum { STEREO_BM = 0, STEREO_SGBM = 1, STEREO_HH = 2, STEREO_VAR = 3 };
//int alg = STEREO_SGBM;//sxp-2018
int alg = STEREO_VAR;//sxp-2018
int SADWindowSize = 0, numberOfDisparities = 0;
bool no_display = false;
float scale = 1.f;
StereoBM bm;
StereoSGBM sgbm;
StereoVar var;
{说明:1这里的STEREO_HH博主暂时不了解}{var算法稍后介绍,先介绍了GC}
BM算法
SGBM算法 Stereo Processing by Semiglobal Matching and Mutual Information
GC算法 算法文献:Realistic CG Stereo Image Dataset with Ground Truth Disparity Maps
对OpenCV中涉及的三种立体匹配算法进行代码及各自优缺点总结:
首先我们看一下BM算法:
该算法代码:
其中minDisparity是控制匹配搜索的第一个参数,代表了匹配搜苏从哪里开始,numberOfDisparities表示最大搜索视差数uniquenessRatio表示匹配功能函数,这三个参数比较重要,可以根据实验给予参数值。
该方法速度最快,一副320*240的灰度图匹配时间为31ms,视差图如下。
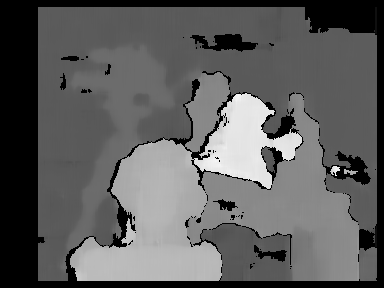
第二种方法是SGBM方法这是OpenCV的一种新算法:
各参数设置如BM方法,速度比较快,320*240的灰度图匹配时间为78ms,视差效果如下图。

第三种为GC方法:
该方法速度超慢,但效果超好。

各方法理论可以参考文献。
立体匹配算法单独分析
StereoBM/StereoSGBM/StereoVar、SAD块匹配算法、GC算法-OpenCV实现

最简单的SAD块匹配算法
//最简单的SAD块匹配算法
//Stereo Match By SAD
#include <opencv2/opencv.hpp>
#include <vector>
#include <algorithm>
#include <iostream>
#include <windows.h>
#include <string>
using namespace std;
using namespace cv;
DWORD t1;
DWORD t2;
void timebegin()
{
t1 = GetTickCount();
}
void timeend(string str)
{
t2 = GetTickCount();
cout << str << " is "<< (t2 - t1)/1000 << "s" << endl;
}
float sadvalue(const Mat &src1, const Mat &src2)
{
Mat matdiff = cv::abs(src1 -src2);
int saddiff = cv::sum(matdiff)[0];
return saddiff;
}
float GetMinSadIndex(std::vector<float> &sad)
{
float minsad = sad[0];
int index = 0;
int len = sad.size();
for (int i = 1; i < len; ++i)
{
if (sad[i] < minsad)
{
minsad = sad[i];
index = i;
}
}
return index;
}
void MatDataNormal(const Mat &src, Mat &dst)
{
normalize(src, dst, 255, 0, NORM_MINMAX );
dst.convertTo(dst, CV_8UC1);
}
void GetPointDepthRight(Mat &disparity, const Mat &leftimg, const Mat &rightimg,
const int MaxDisparity, const int winsize)
{
int row = leftimg.rows;
int col = leftimg.cols;
if (leftimg.channels() == 3 && rightimg.channels() == 3)
{
cvtColor(leftimg, leftimg, CV_BGR2GRAY);
cvtColor(rightimg, rightimg, CV_BGR2GRAY);
}
//Mat disparity = Mat ::zeros(row,col, CV_32S);
int w = winsize;
int rowrange = row - w;
int colrange = col - w - MaxDisparity;
for (int i = w; i < rowrange; ++i)
{
int *ptr = disparity.ptr<int>(i);
for (int j = w; j < colrange; ++j)
{
//Rect rightrect;
Mat rightwin = rightimg(Range(i - w,i + w + 1),Range(j - w,j + w + 1));
std::vector<float> sad(MaxDisparity);
for (int d = j; d < j + MaxDisparity; ++d)
{
//Rect leftrect;
Mat leftwin = leftimg(Range(i - w,i + w + 1),Range(d - w,d + w + 1));
sad[d - j] = sadvalue(leftwin, rightwin);
}
*(ptr + j) = GetMinSadIndex(sad);
}
}
}
void GetPointDepthLeft(Mat &disparity, const Mat &leftimg, const Mat &rightimg,
const int MaxDisparity, const int winsize)
{
int row = leftimg.rows;
int col = leftimg.cols;
if (leftimg.channels() == 3 && rightimg.channels() == 3)
{
cvtColor(leftimg, leftimg, CV_BGR2GRAY);
cvtColor(rightimg, rightimg, CV_BGR2GRAY);
}
//Mat disparity = Mat ::zeros(row,col, CV_32S);
int w = winsize;
int rowrange = row - w;
int colrange = col - w;
for (int i = w; i < rowrange; ++i)
{
int *ptr = disparity.ptr<int>(i);
for (int j = MaxDisparity + w; j < colrange; ++j)
{
//Rect leftrect;
Mat leftwin = leftimg(Range(i - w,i + w + 1),Range(j - w,j + w + 1));
std::vector<float> sad(MaxDisparity);
for (int d = j; d > j - MaxDisparity; --d)
{
//Rect rightrect;
Mat rightwin = rightimg(Range(i - w,i + w + 1),Range(d - w,d + w + 1));
sad[j - d] = sadvalue(leftwin, rightwin);
}
*(ptr + j) = GetMinSadIndex(sad);
}
}
}
//(Left-Right Consistency (LRC)
void CrossCheckDiaparity(const Mat &leftdisp, const Mat &rightdisp, Mat &lastdisp,
const int MaxDisparity, const int winsize)
{
int row = leftdisp.rows;
int col = rightdisp.cols;
int w = winsize;
int rowrange = row - w;
int colrange = col - MaxDisparity - w;
int diffthreshold = 2;
for (int i = w; i < row -w; ++i)
{
const int *ptrleft = leftdisp.ptr<int>(i);
const int *ptrright = rightdisp.ptr<int>(i);
int *ptrdisp = lastdisp.ptr<int>(i);
for (int j = MaxDisparity + w; j < col - MaxDisparity - w; ++j)
{
int leftvalue = *(ptrleft + j);
int rightvalue = *(ptrright + j - leftvalue );
int diff = abs(leftvalue - rightvalue);
if (diff > diffthreshold)
{
*(ptrdisp + j) = 0;
}else
{
*(ptrdisp + j) = leftvalue;
}
}
}
}
int main()
{
Mat leftimg = imread("left.png",0);
Mat rightimg = imread("right.png",0);
if (leftimg.channels() == 3 && rightimg.channels() == 3)
{
cvtColor(leftimg, leftimg, CV_BGR2GRAY);
cvtColor(rightimg, rightimg, CV_BGR2GRAY);
}
float scale = 1;
int row = leftimg.rows * scale;
int col = leftimg.cols * scale;
resize(leftimg, leftimg, Size( col, row));
resize(rightimg,rightimg, Size(col, row));
Mat depthleft = Mat ::zeros(row,col, CV_32S);
Mat depthright = Mat ::zeros(row,col, CV_32S);
Mat lastdisp = Mat ::zeros(row,col, CV_32S);
int MaxDisparity = 60 * scale;
int winsize = 31*scale;
timebegin();
GetPointDepthLeft(depthleft, leftimg, rightimg, MaxDisparity, winsize);
GetPointDepthRight(depthright, leftimg, rightimg, MaxDisparity, winsize);
CrossCheckDiaparity(depthleft,depthright, lastdisp, MaxDisparity, winsize);
timeend("time ");
MatDataNormal(depthleft,depthleft);
MatDataNormal(depthright, depthright);
MatDataNormal(lastdisp, lastdisp);
namedWindow("left", 0);
namedWindow("right", 0);
namedWindow("depthleft", 0);
namedWindow("depthright", 0);
namedWindow("lastdisp",0);
imshow("left", leftimg);
imshow("right", rightimg);
imshow("depthleft", depthleft);
imshow("depthright", depthright);
imshow("lastdisp",lastdisp);
string strsave = "result_";
imwrite(strsave +"depthleft.jpg", depthleft);
imwrite(strsave +"depthright.jpg", depthright);
imwrite(strsave +"lastdisp.jpg",lastdisp);
waitKey(0);
return 0;
}



GC算法 效果最好,速度最慢
#include <highgui.h>
#include <cv.h>
#include <cxcore.h>
#include <iostream>
using namespace std;
using namespace cv;
#include <opencv2/opencv.hpp>
#include <opencv2\imgproc\imgproc.hpp>
#include <opencv2\core\core.hpp>
#include <opencv2\highgui\highgui.hpp>
#include <opencv2\calib3d\calib3d.hpp>
#include <opencv2\features2d\features2d.hpp>
#include <opencv2\legacy\legacy.hpp>
//GC算法---------XXX 有问题,头文件问题 //GC算法 效果最好,速度最慢
int main()
{
//IplImage * img1 = cvLoadImage("left.png",0);
//IplImage * img2 = cvLoadImage("right.png",0);
//IplImage * img1 = cvLoadImage("tsukuba_l.png",0);
//IplImage * img2 = cvLoadImage("tsukuba_r.png",0);
IplImage * img1 = cvLoadImage("left.png",0);
IplImage * img2 = cvLoadImage("right.png",0);
CvStereoGCState* GCState=cvCreateStereoGCState(64,3);
assert(GCState);
cout<<"start matching using GC"<<endl;
CvMat* gcdispleft=cvCreateMat(img1->height,img1->width,CV_16S);
CvMat* gcdispright=cvCreateMat(img2->height,img2->width,CV_16S);
CvMat* gcvdisp=cvCreateMat(img1->height,img1->width,CV_8U);
int64 t=getTickCount();
cvFindStereoCorrespondenceGC(img1,img2,gcdispleft,gcdispright,GCState);
t=getTickCount()-t;
cout<<"Time elapsed:"<<t*1000/getTickFrequency()<<endl;
//cvNormalize(gcdispleft,gcvdisp,0,255,CV_MINMAX);
//cvSaveImage("GC_left_disparity.png",gcvdisp);
cvNormalize(gcdispright,gcvdisp,0,255,CV_MINMAX);
cvSaveImage("GC_right_disparity.png",gcvdisp);
cvNamedWindow("GC_disparity",0);
cvShowImage("GC_disparity",gcvdisp);
cvWaitKey(0);
cvReleaseMat(&gcdispleft);
cvReleaseMat(&gcdispright);
cvReleaseMat(&gcvdisp);
return 0;
}

BM算法:速度很快,效果一般
//BM算法:速度很快,效果一般
#include <highgui.h>
#include <cv.h>
#include <cxcore.h>
#include <iostream>
using namespace std;
using namespace cv;
int main()
{
//IplImage * img1 = cvLoadImage("left.png",0);
//IplImage * img2 = cvLoadImage("right.png",0);
//IplImage * img1 = cvLoadImage("tsukuba_l.png",0);
//IplImage * img2 = cvLoadImage("tsukuba_r.png",0);
IplImage * img1 = cvLoadImage("left.png",0);
IplImage * img2 = cvLoadImage("right.png",0);
CvStereoBMState* BMState=cvCreateStereoBMState();
assert(BMState);
BMState->preFilterSize=9;
BMState->preFilterCap=31;
BMState->SADWindowSize=15;
BMState->minDisparity=0;
BMState->numberOfDisparities=64;
BMState->textureThreshold=10;
BMState->uniquenessRatio=15;
BMState->speckleWindowSize=100;
BMState->speckleRange=32;
BMState->disp12MaxDiff=1;
CvMat* disp=cvCreateMat(img1->height,img1->width,CV_16S);
CvMat* vdisp=cvCreateMat(img1->height,img1->width,CV_8U);
int64 t=getTickCount();
cvFindStereoCorrespondenceBM(img1,img2,disp,BMState);
t=getTickCount()-t;
cout<<"Time elapsed:"<<t*1000/getTickFrequency()<<endl;
cvSave("disp.xml",disp);
cvNormalize(disp,vdisp,0,255,CV_MINMAX);
namedWindow("left", 1);
cvShowImage("left", img1);
namedWindow("right", 1);
cvShowImage("right", img2);
//cvNamedWindow("BM_disparity",0);
namedWindow("BM_disparity", 1);
cvShowImage("BM_disparity",vdisp);
cvWaitKey(0);
//cvSaveImage("cones\\BM_disparity.png",vdisp);
cvReleaseMat(&disp);
cvReleaseMat(&vdisp);
cvDestroyWindow("BM_disparity");
return 0;
}

SGBM算法,作为一种全局匹配算法,立体匹配的效果明显好于局部匹配算法,但是同时复杂度上也要远远大于局部匹配算法
#include <highgui.h>
#include <cv.h>
#include <cxcore.h>
#include <iostream>
using namespace std;
using namespace cv;
//StereoSGBM方法
//SGBM算法,作为一种全局匹配算法,立体匹配的效果明显好于局部匹配算法,但是同时复杂度上也要远远大于局部匹配算法。算法主要是参考Stereo Processing by Semiglobal Matching and Mutual Information。
//
// opencv中实现的SGBM算法计算匹配代价没有按照原始论文的互信息作为代价,而是按照块匹配的代价。
//参考:http://www.opencv.org.cn/forum.php?mod=viewthread&tid=23854
int main()
{
IplImage * img1 = cvLoadImage("left.png",0);
IplImage * img2 = cvLoadImage("right.png",0);
//IplImage * img1 = cvLoadImage("tsukuba_l.png",0);
//IplImage * img2 = cvLoadImage("tsukuba_r.png",0);
cv::StereoSGBM sgbm;
int SADWindowSize = 9;
sgbm.preFilterCap = 63;
sgbm.SADWindowSize = SADWindowSize > 0 ? SADWindowSize : 3;
int cn = img1->nChannels;
int numberOfDisparities=64;
sgbm.P1 = 8*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
sgbm.P2 = 32*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
sgbm.minDisparity = 0;
sgbm.numberOfDisparities = numberOfDisparities;
sgbm.uniquenessRatio = 10;
sgbm.speckleWindowSize = 100;
sgbm.speckleRange = 32;
sgbm.disp12MaxDiff = 1;
Mat disp, disp8;
int64 t = getTickCount();
sgbm((Mat)img1, (Mat)img2, disp);
t = getTickCount() - t;
cout<<"Time elapsed:"<<t*1000/getTickFrequency()<<endl;
disp.convertTo(disp8, CV_8U, 255/(numberOfDisparities*16.));
namedWindow("left", 1);
cvShowImage("left", img1);
namedWindow("right", 1);
cvShowImage("right", img2);
namedWindow("disparity", 1);
imshow("disparity", disp8);
waitKey();
imwrite("sgbm_disparity.png", disp8);
cvDestroyAllWindows();
return 0;
}

Var算法
var.levels = 3; // ignored with USE_AUTO_PARAMS var.pyrScale = 0.5; // ignored with USE_AUTO_PARAMS var.nIt = 25; var.minDisp = -numberOfDisparities; var.maxDisp = 0; var.poly_n = 3; var.poly_sigma = 0.0; var.fi = 15.0f; var.lambda = 0.03f; var.penalization = var.PENALIZATION_TICHONOV; // ignored with USE_AUTO_PARAMS var.cycle = var.CYCLE_V; // ignored with USE_AUTO_PARAMS var.flags = var.USE_SMART_ID | var.USE_AUTO_PARAMS | var.USE_INITIAL_DISPARITY | var.USE_MEDIAN_FILTERING;
//disp = dispp.colRange(numberOfDisparities, img1p.cols);
if (alg != STEREO_VAR)
disp.convertTo(disp8, CV_8U, 255 / (numberOfDisparities*16.));
else
disp.convertTo(disp8, CV_8U);
if (!no_display)
{
namedWindow("left", 1);
imshow("left", img1);
namedWindow("right", 1);
imshow("right", img2);
namedWindow("disparity", 0);
imshow("disparity", disp8);
imwrite("result.bmp", disp8);
printf("press any key to continue...");
fflush(stdout);
waitKey();
printf("\n");
}

Stereo Correspondence算法
class StereoVar
{
StereoVar();
StereoVar( int levels, double pyrScale,
int nIt, int minDisp, int maxDisp,
int poly_n, double poly_sigma, float fi,
float lambda, int penalization, int cycle,
int flags);
virtual ~StereoVar();
virtual void operator()(InputArray left, InputArray right, OutputArray disp);
int levels;
double pyrScale;
int nIt;
int minDisp;
int maxDisp;
int poly_n;
double poly_sigma;
float fi;
float lambda;
int penalization;
int cycle;
int flags;
...
};
The class implements the modified S. G. Kosov algorithm [Publication] that differs from the original one as follows:
- The automatic initialization of method’s parameters is added.
- The method of Smart Iteration Distribution (SID) is implemented.
- The support of Multi-Level Adaptation Technique (MLAT) is not included.
- The method of dynamic adaptation of method’s parameters is not included.
StereoVar::StereoVar
-
用变分匹配算法计算立体匹配
-
该类实现了改进的S. G. Kosov算法[出版],从原来的不同如下:
1增加了方法参数的自动初始化。
2实现了智能迭代分布(SID)方法。
3多层次自适应技术支持(MLAT)不包括在内。
4方法参数的动态调整方法不包括在内。
-
C++:
StereoVar::
StereoVar
(int
levels, double
pyrScale, int
nIt, int
minDisp, int
maxDisp, int
poly_n, double
poly_sigma, float
fi, float
lambda, int
penalization, int
cycle, int
flags
)
StereoVar
class StereoVar
用变分匹配算法计算立体匹配
该类实现了改进的S. G. Kosov算法[出版],从原来的不同如下:
l 增加了方法参数的自动初始化。
l 实现了智能迭代分布(SID)方法。
l 多层次自适应技术支持(MLAT)不包括在内。
l 方法参数的动态调整方法不包括在内。
StereoVar::StereoVar
C++: StereoVar::StereoVar()
C++: StereoVar::StereoVar(int levels, double pyrScale, int nIt, int minDisp, int maxDisp, int poly_n, double poly_sigma, float fi, float lambda, int penalization, int cycle, int flags)
参数:
l levels-金字塔层数,包括初始图像。levels= 1意味着不创建额外的层,只使用原始图像。
如果flaguse_auto_params设置此参数被忽略。
l pyrscale–指定图像的尺度(<1)为每个图像金字塔的建造。pyrscale = 0.5意味着经典的金字塔,在每一层比以前更小的两倍。(如果flaguse_auto_params设置此参数被忽略)。
算法在每个金字塔levels上的迭代次数。(如果flag是use_smart_id设置迭代次数将重 新分配,在这样一种方式,更多的迭代将在更大的程度。)
l mindisp–最小可能的视差值。如果左、右输入图像改变位置,则可能是负值。
l maxdisp–最大差异值。
l poly_n–大小用来寻找在每个像素的像素邻域多项式展开。较大的值意味着图像将被平滑的表面近似,从而产生更鲁棒的算法和更模糊的运动场。通常情况下,poly_n = 3, 5或7
l poly_sigma–的高斯是用来作为多项式展开的基础光滑衍生物的标准偏差。对于poly_n = 5可以设置poly_sigma = 1.1,为poly_n = 7好值将poly_sigma = 1.5
l fi-平滑参数,光滑项的权系数。
l lambdaλ-保边光滑阈值参数。(如果penalization_charbonnier或penalization_perona_malik使用。此参数被忽略)
l penalization –可能的值:penalization_tichonov线性平滑;penalization_charbonnier非线性边缘保持平滑;penalization_perona_malik非线性边缘增强平滑。(如果flaguse_auto_params设置此参数被忽略)。
l Cycle-多重网格循环的周期型。可能的值:cycle_o为零null-和cycle_v为周期 v-cycles (如果flag是use_auto_params设置此参数被忽略)。
l flag–操作标志;可以是以下的组合:
use_initial_disparity:使用输入流作为初始流量近似。
use_equalize_hist:在预处理阶段使用直方图均衡化。
use_smart_id:使用智能迭代分配(SID)。
use_auto_params:允许初始化主要参数的方法。
use_median_filtering:使用在后处理阶段解决的中值滤波器。
首先构造函数初始化stereovar所有的默认参数。所以,你只需要至少设置stereovar::maxdisp和/或stereovar::mindisp。第二个构造函数允许您将每个参数设置为自定义值。
StereoVar::operator ()
C++: void StereoVar::operator()(const Mat& left, const Mat& right, Mat& disp)
用变分算法计算校正立体对的视差。
参数:
l left – Left 8-bit单通道或3-是3通道的图像。
l right – 右图像和左视图相同的图像。
l disp – 视差图显示输出。它是一个与输入图像大小相同的8位带符号单通道图像。
执行变分算法计算校正立体对的视差。见stereo_match.cpp OpenCV的sample样例, 如何准备图片和调用方法。
注:
该方法不是恒定的,所以你不应该在不同的线程同时,使用相同的stereovar实例从不同的线程同时。
OpenCV中的立体视觉算法比较图
