创新思想:
文章提出了多路径神经网络(Multi Attending Path Neural Network, MAP-Net),用于精确提取多尺度建筑足迹和精确边界。这个网络通过多条平行路径学习保留多尺度特征的空间位置,并且每个阶段都以固定频率提取高层语意特征。
主要原理:

MAP-Net的整体结构由三个模块组成:
(a)多径特征提取网络,在保留空间细节信息的同时提取多尺度高层语义特征;
(b)基于注意的多尺度特征自适应压缩和全局空间池增强模块;
©上采样和构建足迹提取模块;
Conv块:由一系列用于提取特征的剩余模块组成,并与每条路径共享;
Gen块:在conv块的基础上生成一条新的并行路径,以提取更丰富的语义特征。

多路径网络的部分细节:前一阶段的卷积是平行的,后一阶段通过下采样和双通道来提取高层语意。再融合到需要的维度。

特征语义增强模块:首先,利用双线性插值对多径提取的多尺度特征进行尺度变换和拼接。然后,信道注意增强模块自适应地挤压重要的信道特征以重构最优特征。最后,引入一个空间池增强模块来捕捉连续建筑足迹的全局依赖关系。
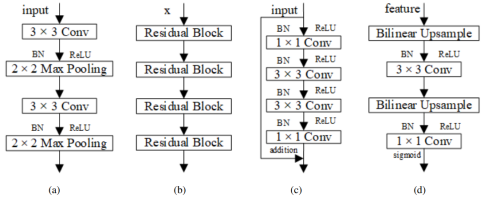
(a)下采样块;(b)转换块;©残余块;(d)上样块;
主要实验结果:
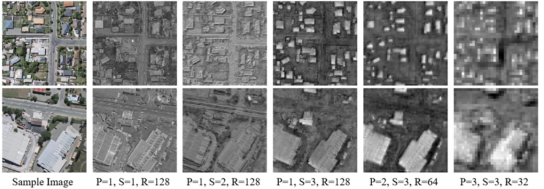
不同阶段的特征映射,其中(a)下采样块;(b)转换块;©残余块;(d)上样块;
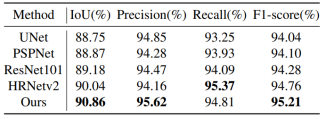

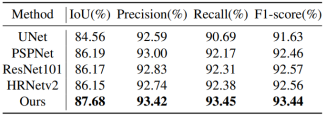
不同算法在不同数据集上的表现,其中IoU是(Intersection Over Union,是一种测量在特定数据集中检测相应物体准确度的一个标准。数据集分别为:WHU、DEEP GLOBE、URBAN 3D。

不同算法在WHU数据集上的结果对比。

不同算法在Deep Globe数据集上的结果对比。

不同算法在Urban 3D数据集上的结果对比。