一、基本知识
1、概述
基本原理:
由终点向起点进行搜索,使用Dijkstra算法,存储路网中目标点到每个点的最短路径长度k, 和该节点到目标点的实际长度值h,开始情况下k=h并且存储每个节点的上一个节点,保证能够沿着链接走下去。
计算结束后,获取了一条当时最优路径。当到某个节点时,发现该节点已经无法通行,则对已存储的路网信息一些相关点的h值进行修改变大),选择一个邻居点满足仍然h==k的,即仍然是最优路径上的点,作为下一个点,然后走到终点。
应用场景
A*在静态路网非常有效,但不适用在动态路网,环境如权重等不断变化的动态环境下。
D*是一种启发式的路径搜索算法,是火星探测器采用的寻路算法,适合面对周围环境未知或者周围环境存在动态变化的场景。
2、符号定义
(1) D 维护要评估的节点列表,称为“OPEN list”。G表示终点,两个点的记号中会省略。
c(X,Y): x和y的cost。
(2) t(x)表示x的状态,包括:
NEW:它从未被列入OPEN list
OPEN:当前在OPEN list中
CLOSED:已经从OPEN list中剔除
(3) D的估计函数包括h(G,X)和k(G,X):h函数会随着拓扑结构的变化而变化,key始终是h中最小的那一个。
Kmin:当前OPEN中key的最小值
Kold:上一次的最小值
OPEN的节点分为两类:
RAISE:它的成本比上次OPEN list时要高
LOWER:它的成本比上次OPEN list时要低
二、算法流程
1、主要流程:
算法步骤:
从目标点出发使用类似dijkstr的方法计算每个节点的h,直到起始点被OPEN表弹出。得到了静态环境下所有节点的信息(h and k)。
从起始点开始利用第一步获得的指针b(从一个节点指向下一个节点)一步步走向终点。若在某一步发现会碰撞,那么将该节点的h置为无穷大后放入OPEN表,开始更新指针b(h也会更新),从而更新规划路径,这样只会改变周围节点的信息而无需replan,大大减少了规划时间。
2、伪代码:
文末参考论文中伪代码如下:

(图片来源于参考论文)
具体D*主要包括两个部分:
PROCESS-STATE: 计算终点到当前节点的最优cost.
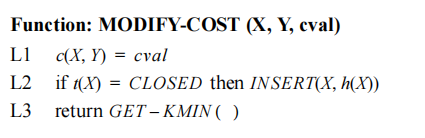
MODIFY-COST: 用来修正cost。
具体如下:
(1) 将所有节点的tag设置为NEW,h(G)设为0,将G放置在OPEN中。
(2)循环,直到当前的节点X从OPEN中移除,表示找到了一条从X出发到达终点的路径。
(3)根据获得的路径,从节点X往后移动,直到达到终点或者检测到cost发生变化。
(4)当cost发生变化时,调用MODIFY-COST,并将因为障碍物而cost受到影响的节点重新放入OPEN中。
假设Y是发现状态时机器人所处的节点。通过调用PROCESS−STATE直到kmin ≥ h(Y), 此时cost的变化已经传播到Y,因此可以找到一条新的从Y到终点的最优路径。
3、流程理解:
(1)第一个函数会被反复调用,直到机器人的状态X从列表中删除,或者返回-1值,此时序列{x}要么已经计算出来,要么不存在。
然后机器人继续跟随序列中的反向指针,直到它达到目标或发现弧代价函数中的错误(例如,由于检测到障碍物)。
(2)第二个函数立即被调用,以纠正并将受影响的状态放到列表中。
设Y为机器人在其中发现错误时的状态。通过调用第二个函数直到它返回Kmin >= h(Y),成本变化被传播到状态Y。此时,构建了一个新的序列{Y},机器人继续沿着序列中的反向指针朝着目标前进。
(3)初始:所有结点状态t(x)被设置为new,h(G)为0,终点加入OPEN list中。
(4)MIN - STATE返回open list中最小的K()值或者空。Delete(x)从openlist中删除状态x,令t(x)=closed;
(5)Insert(x, Hnew),
如果t(x)=new,计算k(x)=Hnew;
如果t(x)=OPEN,计算k(x)=min(k(x),Hnew);
如果t(x)=closed,计算k(x)=Hnew,
设置h(x)=Hnew,t(x)=OPEN,在k排序的open list中放置状态x;
(6)弹出open表中最小的节点,并删除这个节点。然后分类处理之:
(7)k_old<h(x): 说明该节点x处于raise状态,可以设想x是之前那个父节点突变为墙的子节点。当前h(x)升高说明原来的路径已经不是最优的了,如果在x周围能找到一个点,h.y+c(x,y)更小,那就修改x的父节点,重置其h的值。
(8)k_old=h(x): 该节点x处于lower的状态,并没有受到障碍影响,或者还在第一遍遍历的阶段。if后面的判断代表:周围是标记为new的节点,代表第一次被遍历到。or 它的父节点是X,但是h.y却不等, 这说明h.y被更改了,但是父节点还没有变。
三、代码实现
参考论文
《Optimal and Efficient Path Planning for Partially-Known Environments》
内容来源网络和参考链接整理,侵权联系删~