原创 | 文BFT机器人
自然界中的跳蚤通常具有强大的肌肉,可以通过强大的跳跃和爬行能力克服复杂环境中的障碍。这些只有3毫米长的小生物,可以在一次跳跃中跃出330毫米——接近他们自身长度100倍的距离。
近日,北京航天航空大学研究团队发明的新型微型机器人也实现了类似的壮举,其成果发表在《IEEE Robotics and Automation Letters》上。
01 创新点
“我们的灵感来源于自然界中的跳蚤,尽管它们体积小,但可以释放出巨大的潜力,跳跃的距离接近它们身体长度的100倍。”
跳蚤是已知相同体型的动物中,最好的跳投者。对于昆虫大小的机器人来说,很难在如此小的体型下模仿跳蚤强大的行动,并且由于体积效应,跳蚤大小的机器人难以配备强大的执行器,驱动器的性能会显著下降。
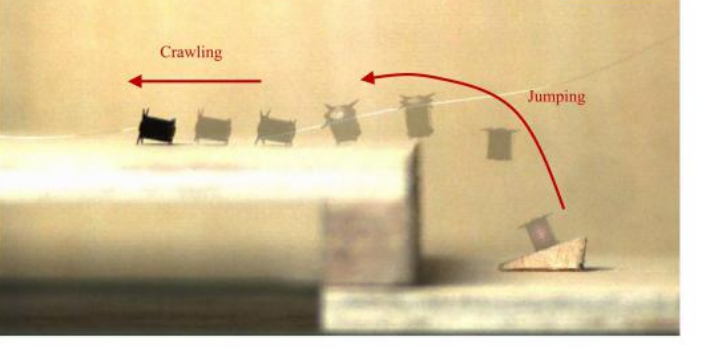
在这项工作中,研究团队提出了一种用于微型机器人(长度为3.4毫米)的新型高压脉冲驱动器,以实现强大的跳跃和快速爬行运动。3.4毫米的跳蚤机器人,能够一次性释放大量能量,其跳跃高度和长度分别可达体长的46倍和87倍,在平面上的爬行速度每秒可达46倍体长。凭借其微小的尺寸和卓越的跳跃性能,跳蚤机器人可以跳过障碍物,然后爬过狭窄的缝隙。
参与这项研究的北京航天航空大学三年级博士生Ruide Yun评价道:“目前在机器人领域还没有人能够实现这一壮举。”
02 设计
该微型机器人体积与真正的跳蚤相差无二,其结构包括一个活塞室(由内部和外部弹性弹簧约束的腔室)、一个弹性弹簧、两个电极和四条腿。
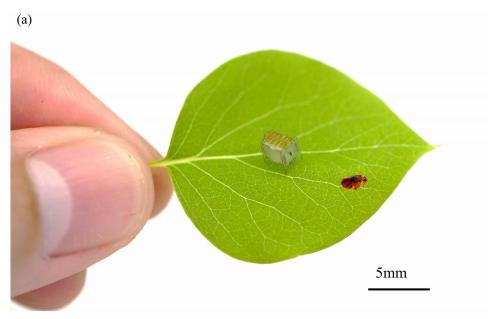
图(a)机器人的光学照片与实际跳蚤的比较
该机器人的长度为3.4毫米,宽度为2.2毫米,质量为12毫克,两个电极之间的间隙距离为0.7毫米。机器人不是依靠燃料的燃烧,而是在活塞腔内的正负电极之间释放高压放点,驱使机器人运动。
当在两个电极上施加4kv级别的脉冲电压时,两个电极之间就会产生电弧,从而加热腔室中的空气。而由于腔室的密闭属性,空气没有逃逸的空间,电弧的能量就会转化为活塞室的膨胀运动。放电结束后,腔内的空气冷却,活塞回到其原始位置,弹性弹簧恢复活室,等待下一次放点,以完成整个振动循环。
通过这个循环,可以得到一个往复运动,实现高功率输出的高频振动,驱动机器人爬行和跳跃。

图(b)跳蚤机器人的结构组成及工作原理
03 强大的运动能力
在一系列的实验中,该机器人能够跳出长度为296.25毫米、高度为156.28毫米的距离,这相当于跳得比它自己的身体长度和高度分别远87倍和高45倍。在复杂的工作环境中,该机器人还可以越过大于其身体数百倍的障碍物,例如石头、台阶等。
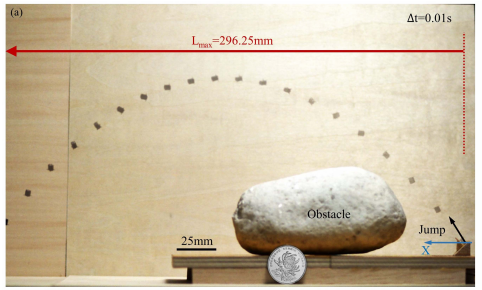
图(a)跳蚤机器人跳过一块石头

图(b)跳蚤机器人跳上300ml的可乐
研究团队通过优化腿部设计,让跳蚤机器人实现了快速爬行,这要归功于它的腿和地面之间的不对称摩擦。在本研究中,它在一个平坦的表面上实现了每秒超过46个身体长度的爬行速度。

图(a)-(b)三个具有不同腿部设计和倾斜角的机器人原型

(c)-(e)三个原型的不同脉冲频率和电压的归一化爬行速度的测试结果
跳蚤机器人所展现出的与真实跳蚤相似的强大运动能力,让人惊喜。对此,研究团队也直言:"我们最初的实验只是为了验证新颖的驱动方法,但我们从未料到机器人会像自然跳蚤一样跳得这么高,同时还表现出良好的爬行性能。"
04未来应用
基于该机器人的毫米级尺寸、快速爬行速度和良好的环境适应性,其在未来可以用于一系列潜在的探测和侦察应用,甚至可以作为研究小型昆虫如跳蚤的一种手段,这也正是机器人背后的灵感来源。
然而,这项工作仍处于早期阶段,在实现其现实世界的应用之前,目前的机器人原型仍有许多限制需要解决。目前的原型虽配备强大的执行器,但执行器的振动原理是基于电弧产生的热膨胀,必须用电线连接起来,以实现跳跃和爬行的高电压,对电路有较高要求,并且难以在较短周期内实现离线运动。此外,目前机器人仍然缺乏转向能力,难以实现爬行轨迹控制。
对此,研究团队表示,"接下来,我们将进行研究,帮助机器人摆脱电线的束缚,实现自由跳跃和爬行,我们将结合多个驱动器来实现机器人的可控跳跃和爬行",并指出团队未来可能探索使用多驱动执行器来控制机器人的运动,不断完善该项技术。
更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。