论文速读 – Monocular Vision SLAM-Based UAV Autonomous Landing in Emergencies and Unknown Environments
一. 摘要
无人机的着陆和回收的安全性研究势在必行,本文实现一种非结构化环境中无人机单目视觉自动着陆系统。本文提出一种融合3D特征与中通滤波结合的噪声剔除方法,并构建带有高度的栅格地图。为了提高着陆选择的速度和精度,提出了使用区域分割方式检测不同高度网格区域的边缘。作为一种视觉着陆技术,本文在两个任务中评估所提出的算法:场景重建完整性和着陆位置安全性。
首先,无人机扫描场景并获取单目关键帧进行视觉SLAM,以便估计无人机位姿,并创建三维点云地图。然后,过滤后的三维点云地图被转换为栅格地图。栅格地图被进一步划分为不同的区域选择适当的着陆区。因此,它可以进行自主路线规划。最后,当它在着陆场上停止,它将在着陆区附近启动下降模式。
二. 方法
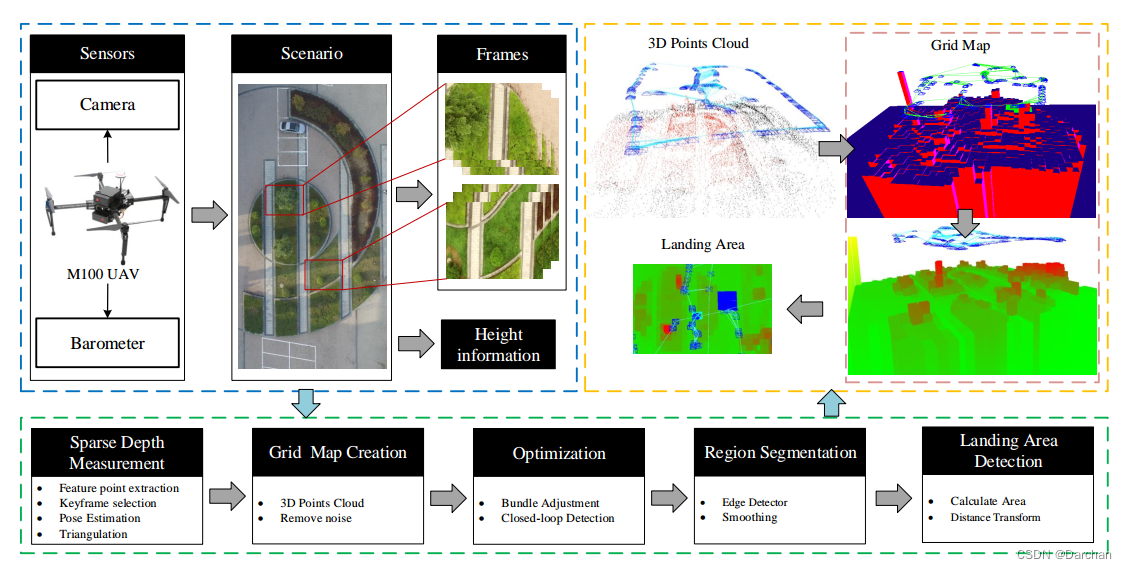
1. 稀疏深度估计
ORB_SLAM2
PNP
2. 创建栅格地图
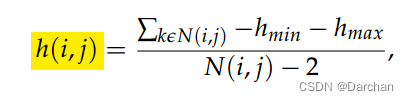
将三维点云转化为二维栅格地图,将多帧叠加的点云投影到格网内,每个格网内存在一组带有高度信息的二维点。
每个格网高度计算:
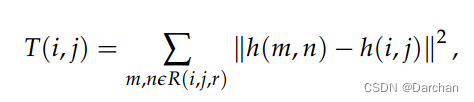
计算格网邻域内的高度差的平方和:
3. 位姿和图优化
最小二乘图优化
g2o
4. 基于区域分割的着陆检测
4.1 基于图像分割的栅格地图分割算法,伪代码如下:
输入:栅格地图
1. 使用图像中mean-shift算法对栅格地图进行平滑。
2. while 格网内点都聚类完毕 do
3. 计算和判断每个格网的邻域是否满足聚类条件
4. 加入该格网到聚类结果,存储为zi
5. end while
6. for i=0...N zi do
7. if 格网空间距离 < hs 且高度距离 < hr
8. 将聚类结果拆分成不同类别的小块(推测目的是为了将大块区域切分成小块的可降落区域)
9. endif
10. end for
输出:每一个格网的类别,以及聚类后的结果Li
4.2 选择最佳着陆区域算法
输入:不同类别格网的高度Ci,适当的着陆高度H,适当着陆面积S
for i=0...N Ci do
if Ci == H 且面积s == S
将其加入到可降落的备选集合ai
else
将其加入到障碍物集合bi
end if
end for
for i=0...N ai do
for j=0...N bj do
计算每一个ai到每一个临近bi的距离,且做累加求和得到di
end for
end for
输出:带有最大di距离的着陆面积ai,代表距离其余障碍物最远
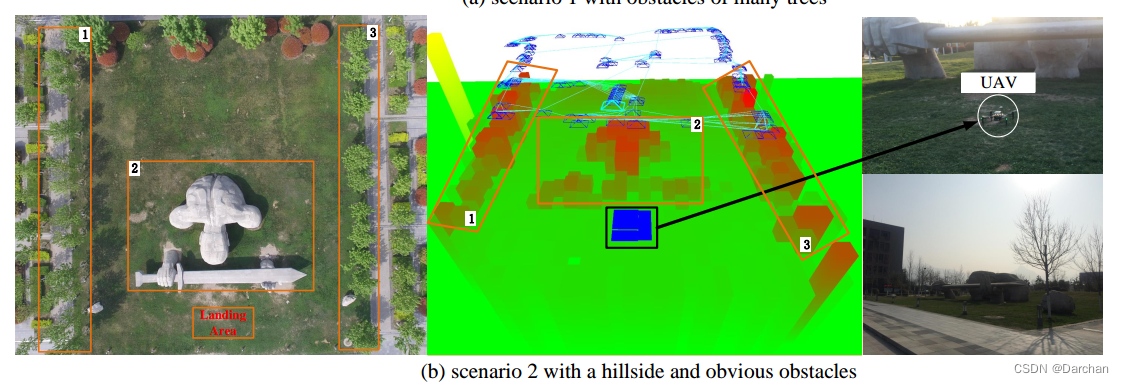
三. 实验结果
详细参考原文,这里列举其中一幅图。