【Jetson目标检测SSD-MobileNet应用实例】(一)win11中配置SSD-MobileNet网络训练境搭建
【Jetson目标检测SSD-MobileNet应用实例】(二)制作自己的数据集–数据集的采集、标注、预处理
【Jetson目标检测SSD-MobileNet应用实例】(三)训练自己的检测模型和推理测试
【Jetson目标检测SSD-MobileNet应用实例】(四)在Jetson上使用CSI摄像头进行视频推理并输出检测结果
使用模型检测只是我们的对算法的使用,更进一步我们要根据算法得到的结果对应上实际的问题,通过和STM32的配合实现更加实时的电机控制,达到最终解决问题的目的。
Jetson nano串口使用
在Jetson nano中串口的使用我们大多数情况下可以参考Ubuntu下串口的使用,二者除了串口名称的不同其它基本上没有什么差别。
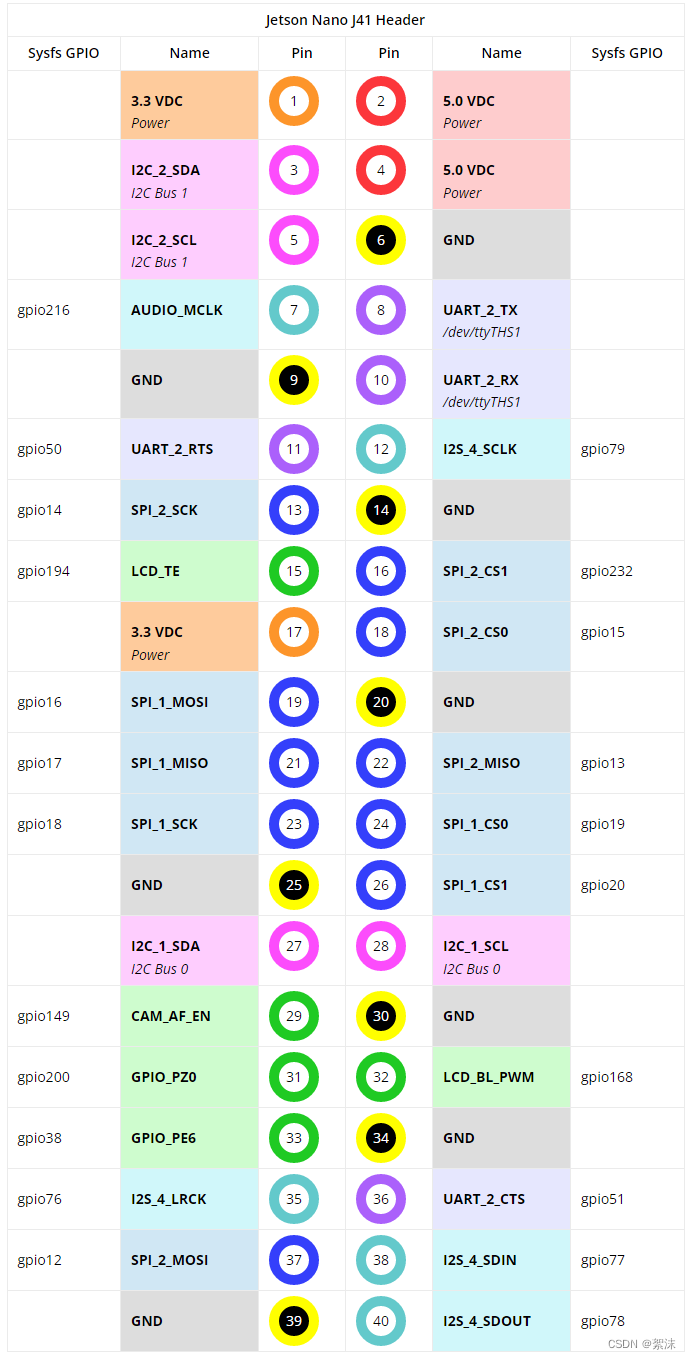
在下面的程序中我们使用它的UART2,它对应ttyTH1,也就是第8、10号引脚。
查找可用串口
在终端输入指令:
ls -l /dev/ttyTHS*
可以查看使能了的串口,如果没有的话我们就打开THS1的权限
sudo chmod 777 /dev/ttyTHS1
再次查找设备之后应该就有显示了。
Jetson端串口设置
首先要安装py-serial库
sudo apt-get install python3-serial
通过这个库我们可以使用python进行串口的使用了
然后在jetson 端使用如下脚本测试:
import serial
from time import sleep
if __name__=="__main__":
ser = serial.Serial()
ser.port = "/dev/ttyTHS1" # 设置端口号
ser.baudrate = 9600 # 设置波特率
ser.bytesize = 8 # 设置数据位
ser.stopbits = 1 # 设置停止位
ser.parity = "N" # 设置校验位
ser.open() # 打开串口,要找到对的串口号才会成功
uarthand = 0xa
uardlast = 0xb
row = 0x11
speed = 0x21
i = 0x01
b = 0x02
if (ser.isOpen()):
print("打开成功")
else:
print("打开失败")
while True:
if i>10:
i = 0
row = 0x11
if b>10:
b = 0
speed = 0x21
if (ser.isOpen()):
ser.write(chr(uarthand).encode())
ser.write(chr(row).encode())
ser.write(chr(speed).encode())
ser.write(chr(uardlast).encode())
else:
print("发送失败")
i = i+1
b = b+1
row = row+0x01
speed = speed+0x02
sleep(0.2)
在脚本中我简单定义了一个通信帧的协议,包含帧头帧尾,帧头是0x0a,帧尾是0x0b,中间两帧是数据。所有数据通过16进制发送
STM32端接收数据
在STM32端我使用STM32F407ZGT6的串口2,串口的配置就不重复说了,这里直接看到串口的接收中断函数,在串口的中断函数中我们对数据进行解析
u16 USART2_RX_STA = 0;
u8 USART2_ReadState =0;
u8 USART2_RX_BUF[4];
void USART2_IRQHandler(void) //串口2中断服务程序
{
u8 Res = 0;
if (USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res = USART_ReceiveData(USART2); //(USART1->DR); //读取接收到的数据
if (USART2_RX_STA == 0)
{
if (Res == 0x0A)
{
USART2_RX_BUF[USART2_RX_STA] = Res;
USART2_RX_STA++;
}
else
USART2_RX_STA = 0;
}
else if (USART2_RX_STA >= 1)
{
if (Res == 0x0B)
{
USART2_RX_BUF[USART2_RX_STA] = Res;
USART2_ReadState = 1;
USART_Cmd(USART2, DISABLE);
USART2_RX_STA = 0;
}
else
{
USART2_RX_BUF[USART2_RX_STA] = Res;
USART2_RX_STA ++;
}
}
}
}
void USART2_RX_BUF_Free(void)
{
for(int i = 0; i<4 ; i++)
{
USART2_RX_BUF[i] = 0;
}
}
在主函数中我们只需要一直判断USART2_ReadState这个标志位的值,当它为1的时候说明串口接收到一帧数据,就可以根据 USART2_RX_BUF数组的中间两位进行进一步的控制操作了。注意需要及时清除标志位。