这是俄罗斯高等经济学院的系列课程第一门,Introduction to Advanced Machine Learning,第二周的荣誉作业。
本次作业只有一个任务,不依赖任何开源框架,仅基于numpy建立神经网络,对MNIST图片进行识别。难易程度:中等。
1. 变量的关系表示如下
代码中出现的两个变量grad_input 和 grad_output的定义如下
上述公式,加了mean(),因此在计算
和
时不需要再求mean。
2.本次作业中一共定义了三个类。其中一个父类,layer(),两个子类,relu() 和 dense()。每个类中都是三个方法,__init__(),forward(),backward(),分别做初始化,前向传播,反向传播的作用。
Your very own neural network
In this notebook, we’re going to build a neural network using naught but pure numpy and steel nerves. It’s going to be fun, I promise!
# use the preloaded keras datasets and models
! mkdir -p ~/.keras/datasets
! mkdir -p ~/.keras/models
! ln -s $(realpath ../readonly/keras/datasets/*) ~/.keras/datasets/
! ln -s $(realpath ../readonly/keras/models/*) ~/.keras/models/from __future__ import print_function
import numpy as np
np.random.seed(42)Here goes our main class: a layer that can .forward() and .backward().
class Layer:
"""
A building block. Each layer is capable of performing two things:
- Process input to get output: output = layer.forward(input)
- Propagate gradients through itself: grad_input = layer.backward(input, grad_output)
Some layers also have learnable parameters which they update during layer.backward.
"""
def __init__(self):
"""Here you can initialize layer parameters (if any) and auxiliary stuff."""
# A dummy layer does nothing
pass
def forward(self, input):
"""
Takes input data of shape [batch, input_units], returns output data [batch, output_units]
"""
# A dummy layer just returns whatever it gets as input.
return input
def backward(self, input, grad_output):
"""
Performs a backpropagation step through the layer, with respect to the given input.
To compute loss gradients w.r.t input, you need to apply chain rule (backprop):
d loss / d x = (d loss / d layer) * (d layer / d x)
Luckily, you already receive d loss / d layer as input, so you only need to multiply it by d layer / d x.
If your layer has parameters (e.g. dense layer), you also need to update them here using d loss / d layer
"""
# The gradient of a dummy layer is precisely grad_output, but we'll write it more explicitly
num_units = input.shape[1]
d_layer_d_input = np.eye(num_units)
return np.dot(grad_output, d_layer_d_input) # chain ruleThe road ahead
We’re going to build a neural network that classifies MNIST digits. To do so, we’ll need a few building blocks:
- Dense layer - a fully-connected layer,
- ReLU layer (or any other nonlinearity you want)
- Loss function - crossentropy
- Backprop algorithm - a stochastic gradient descent with backpropageted gradients
Let’s approach them one at a time.
Nonlinearity layer
This is the simplest layer you can get: it simply applies a nonlinearity to each element of your network.
class ReLU(Layer):
def __init__(self):
"""ReLU layer simply applies elementwise rectified linear unit to all inputs"""
pass
def forward(self, input):
"""Apply elementwise ReLU to [batch, input_units] matrix"""
return np.maximum(input,0)# <your code. Try np.maximum>
def backward(self, input, grad_output):
"""Compute gradient of loss w.r.t. ReLU input"""
relu_grad = input > 0
return grad_output*relu_grad # some tests
from util import eval_numerical_gradient
x = np.linspace(-1,1,10*32).reshape([10,32])
l = ReLU()
grads = l.backward(x,np.ones([10,32])/(32*10))
numeric_grads = eval_numerical_gradient(lambda x: l.forward(x).mean(), x=x)
assert np.allclose(grads, numeric_grads, rtol=1e-3, atol=0),\
"gradient returned by your layer does not match the numerically computed gradient"Instant primer: lambda functions
In python, you can define functions in one line using the lambda syntax: lambda param1, param2: expression
For example: f = lambda x, y: x+y is equivalent to a normal function:
def f(x,y):
return x+yFor more information, click here.
Dense layer
Now let’s build something more complicated. Unlike nonlinearity, a dense layer actually has something to learn.
A dense layer applies affine transformation. In a vectorized form, it can be described as:
Where
* X is an object-feature matrix of shape [batch_size, num_features],
* W is a weight matrix [num_features, num_outputs]
* and b is a vector of num_outputs biases.
Both W and b are initialized during layer creation and updated each time backward is called.
class Dense(Layer):
def __init__(self, input_units, output_units, learning_rate=0.1):
"""
A dense layer is a layer which performs a learned affine transformation:
f(x) = <W*x> + b
"""
self.learning_rate = learning_rate
# initialize weights with small random numbers. We use normal initialization,
# but surely there is something better. Try this once you got it working: http://bit.ly/2vTlmaJ
self.weights = np.random.randn(input_units, output_units)*0.01
self.biases = np.zeros(output_units)
def forward(self,input):
"""
Perform an affine transformation:
f(x) = <W*x> + b
input shape: [batch, input_units]
output shape: [batch, output units]
"""
return np.dot(input, self.weights) + self.biases# [batch, input_units] * [input_units, output_units]
def backward(self,input,grad_output):
# compute d f / d x = d f / d dense * d dense / d x
# where d dense/ d x = weights transposed
grad_input = np.dot(grad_output, self.weights.T)#<your code here>
# compute gradient w.r.t. weights and biases
batch_size = input.shape[0]
grad_weights = np.dot(input.T,grad_output)#Grad_output is already divided by batch size
grad_biases = np.sum(grad_output,axis = 0)#Grad_output is already divided by batch size
assert grad_weights.shape == self.weights.shape and grad_biases.shape == self.biases.shape
# Here we perform a stochastic gradient descent step.
# Later on, you can try replacing that with something better.
self.weights = self.weights - self.learning_rate * grad_weights
self.biases = self.biases - self.learning_rate * grad_biases
return grad_inputTesting the dense layer
Here we have a few tests to make sure your dense layer works properly. You can just run them, get 3 “well done”s and forget they ever existed.
… or not get 3 “well done”s and go fix stuff. If that is the case, here are some tips for you:
* Make sure you compute gradients for W and b as sum of gradients over batch, not mean over gradients. Grad_output is already divided by batch size.
* If you’re debugging, try saving gradients in class fields, like “self.grad_w = grad_w” or print first 3-5 weights. This helps debugging.
* If nothing else helps, try ignoring tests and proceed to network training. If it trains alright, you may be off by something that does not affect network training.
l = Dense(128, 150)
assert -0.05 < l.weights.mean() < 0.05 and 1e-3 < l.weights.std() < 1e-1,\
"The initial weights must have zero mean and small variance. "\
"If you know what you're doing, remove this assertion."
assert -0.05 < l.biases.mean() < 0.05, "Biases must be zero mean. Ignore if you have a reason to do otherwise."
# To test the outputs, we explicitly set weights with fixed values. DO NOT DO THAT IN ACTUAL NETWORK!
l = Dense(3,4)
x = np.linspace(-1,1,2*3).reshape([2,3])
l.weights = np.linspace(-1,1,3*4).reshape([3,4])
l.biases = np.linspace(-1,1,4)
assert np.allclose(l.forward(x),np.array([[ 0.07272727, 0.41212121, 0.75151515, 1.09090909],
[-0.90909091, 0.08484848, 1.07878788, 2.07272727]]))
print("Well done!")Well done!
# To test the grads, we use gradients obtained via finite differences
from util import eval_numerical_gradient
x = np.linspace(-1,1,10*32).reshape([10,32])
l = Dense(32,64,learning_rate=0)
numeric_grads = eval_numerical_gradient(lambda x: l.forward(x).sum(),x)
print(numeric_grads[:,0])
grads = l.backward(x,np.ones([10,64]))
print(grads[:,0])
assert np.allclose(grads,numeric_grads,rtol=1e-3,atol=0), "input gradient does not match numeric grad"
print("Well done!")[ 0.01342668 0.01342668 0.01342668 0.01342668 0.01342668 0.01342668
0.01342668 0.01342668 0.01342668 0.01342668]
[ 0.01342668 0.01342668 0.01342668 0.01342668 0.01342668 0.01342668
0.01342668 0.01342668 0.01342668 0.01342668]
Well done!
#test gradients w.r.t. params
def compute_out_given_wb(w,b):
l = Dense(32,64,learning_rate=1)
l.weights = np.array(w)
l.biases = np.array(b)
x = np.linspace(-1,1,10*32).reshape([10,32])
return l.forward(x)
def compute_grad_by_params(w,b):
l = Dense(32,64,learning_rate=1)
l.weights = np.array(w)
l.biases = np.array(b)
x = np.linspace(-1,1,10*32).reshape([10,32])
l.backward(x,np.ones([10,64]) / 10.)
return w - l.weights, b - l.biases
w,b = np.random.randn(32,64), np.linspace(-1,1,64)
numeric_dw = eval_numerical_gradient(lambda w: compute_out_given_wb(w,b).mean(0).sum(),w )
numeric_db = eval_numerical_gradient(lambda b: compute_out_given_wb(w,b).mean(0).sum(),b )
grad_w,grad_b = compute_grad_by_params(w,b)
print(numeric_db[:,])
print(grad_b[:,])
assert np.allclose(numeric_dw,grad_w,rtol=1e-3,atol=0), "weight gradient does not match numeric weight gradient"
assert np.allclose(numeric_db,grad_b,rtol=1e-3,atol=0), "weight gradient does not match numeric weight gradient"
print("Well done!")Well done!
The loss function
Since we want to predict probabilities, it would be logical for us to define softmax nonlinearity on top of our network and compute loss given predicted probabilities. However, there is a better way to do so.
If you write down the expression for crossentropy as a function of softmax logits (a), you’ll see:
If you take a closer look, ya’ll see that it can be rewritten as:
It’s called Log-softmax and it’s better than naive log(softmax(a)) in all aspects:
* Better numerical stability
* Easier to get derivative right
* Marginally faster to compute
So why not just use log-softmax throughout our computation and never actually bother to estimate probabilities.
Here you are! We’ve defined the both loss functions for you so that you could focus on neural network part.
def softmax_crossentropy_with_logits(logits,reference_answers):
"""Compute crossentropy from logits[batch,n_classes] and ids of correct answers"""
logits_for_answers = logits[np.arange(len(logits)),reference_answers]
xentropy = - logits_for_answers + np.log(np.sum(np.exp(logits),axis=-1))
return xentropy
def grad_softmax_crossentropy_with_logits(logits,reference_answers):
"""Compute crossentropy gradient from logits[batch,n_classes] and ids of correct answers"""
ones_for_answers = np.zeros_like(logits)
ones_for_answers[np.arange(len(logits)),reference_answers] = 1
softmax = np.exp(logits) / np.exp(logits).sum(axis=-1,keepdims=True)
return (- ones_for_answers + softmax) / logits.shape[0]logits = np.linspace(-1,1,500).reshape([50,10])
answers = np.arange(50)%10
softmax_crossentropy_with_logits(logits,answers)
grads = grad_softmax_crossentropy_with_logits(logits,answers)
numeric_grads = eval_numerical_gradient(lambda l: softmax_crossentropy_with_logits(l,answers).mean(),logits)
assert np.allclose(numeric_grads,grads,rtol=1e-3,atol=0), "The reference implementation has just failed. Someone has just changed the rules of math."Full network
Now let’s combine what we’ve just built into a working neural network. As we announced, we’re gonna use this monster to classify handwritten digits, so let’s get them loaded.
import matplotlib.pyplot as plt
%matplotlib inline
from preprocessed_mnist import load_dataset
X_train, y_train, X_val, y_val, X_test, y_test = load_dataset(flatten=True)
plt.figure(figsize=[6,6])
for i in range(4):
plt.subplot(2,2,i+1)
plt.title("Label: %i"%y_train[i])
plt.imshow(X_train[i].reshape([28,28]),cmap='gray');!

We’ll define network as a list of layers, each applied on top of previous one. In this setting, computing predictions and training becomes trivial.
print(X_train.shape)
network = []
network.append(Dense(X_train.shape[1],100))
network.append(ReLU())
network.append(Dense(100,200))
network.append(ReLU())
network.append(Dense(200,10))
print(network)(50000, 784)
[<__main__.Dense object at 0x7fcc25d9ae80>, <__main__.ReLU object at 0x7fcc25d9aef0>, <__main__.Dense object at 0x7fcc25e99710>, <__main__.ReLU object at 0x7fcc23b37b70>, <__main__.Dense object at 0x7fcc2405f198>]
def forward(network, X):
"""
Compute activations of all network layers by applying them sequentially.
Return a list of activations for each layer.
Make sure last activation corresponds to network logits.
"""
activations = []
input = X
# <your code here>
for layer in network:
activations.append(layer.forward(input))
input = activations[-1]
assert len(activations) == len(network)
return activations
def predict(network,X):
"""
Compute network predictions.
"""
logits = forward(network,X)[-1]
return logits.argmax(axis=-1)
def train(network,X,y):
"""
Train your network on a given batch of X and y.
You first need to run forward to get all layer activations.
Then you can run layer.backward going from last to first layer.
After you called backward for all layers, all Dense layers have already made one gradient step.
"""
# Get the layer activations
layer_activations = forward(network,X)
layer_inputs = [X]+layer_activations #layer_input[i] is an input for network[i]
logits = layer_activations[-1]
# Compute the loss and the initial gradient
loss = softmax_crossentropy_with_logits(logits,y)
loss_grad = grad_softmax_crossentropy_with_logits(logits,y)
# <your code: propagate gradients through the network>
for layer_i in range(len(network))[::-1]:
layer = network[layer_i]
loss_grad = layer.backward(layer_inputs[layer_i],loss_grad)
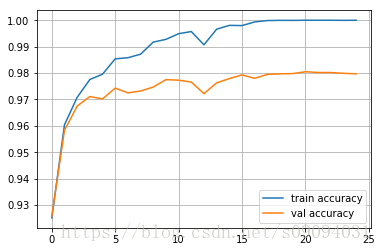
return np.mean(loss)Instead of tests, we provide you with a training loop that prints training and validation accuracies on every epoch.
If your implementation of forward and backward are correct, your accuracy should grow from 90~93% to >97% with the default network.
Training loop
As usual, we split data into minibatches, feed each such minibatch into the network and update weights.
from tqdm import trange
def iterate_minibatches(inputs, targets, batchsize, shuffle=False):
assert len(inputs) == len(targets)
if shuffle:
indices = np.random.permutation(len(inputs))
for start_idx in trange(0, len(inputs) - batchsize + 1, batchsize):
if shuffle:
excerpt = indices[start_idx:start_idx + batchsize]
else:
excerpt = slice(start_idx, start_idx + batchsize)
yield inputs[excerpt], targets[excerpt]from IPython.display import clear_output
train_log = []
val_log = []for epoch in range(25):
for x_batch,y_batch in iterate_minibatches(X_train,y_train,batchsize=32,shuffle=True):
train(network,x_batch,y_batch)
train_log.append(np.mean(predict(network,X_train)==y_train))
val_log.append(np.mean(predict(network,X_val)==y_val))
clear_output()
print("Epoch",epoch)
print("Train accuracy:",train_log[-1])
print("Val accuracy:",val_log[-1])
plt.plot(train_log,label='train accuracy')
plt.plot(val_log,label='val accuracy')
plt.legend(loc='best')
plt.grid()
plt.show()
Epoch 24
Train accuracy: 1.0
Val accuracy: 0.9797
!
Peer-reviewed assignment
Congradulations, you managed to get this far! There is just one quest left undone, and this time you’ll get to choose what to do.
Option I: initialization
- Implement Dense layer with Xavier initialization as explained here
To pass this assignment, you must conduct an experiment showing how xavier initialization compares to default initialization on deep networks (5+ layers).
Option II: regularization
- Implement a version of Dense layer with L2 regularization penalty: when updating Dense Layer weights, adjust gradients to minimize
To pass this assignment, you must conduct an experiment showing if regularization mitigates overfitting in case of abundantly large number of neurons. Consider tuning for better results.
Option III: optimization
- Implement a version of Dense layer that uses momentum/rmsprop or whatever method worked best for you last time.
Most of those methods require persistent parameters like momentum direction or moving average grad norm, but you can easily store those params inside your layers.
To pass this assignment, you must conduct an experiment showing how your chosen method performs compared to vanilla SGD.
General remarks
Please read the peer-review guidelines before starting this part of the assignment.
In short, a good solution is one that:
* is based on this notebook
* runs in the default course environment with Run All
* its code doesn’t cause spontaneous eye bleeding
* its report is easy to read.
Formally we can’t ban you from writing boring reports, but if you bored your reviewer to death, there’s noone left alive to give you the grade you want.
Bonus assignments
As a bonus assignment (no points, just swag), consider implementing Batch Normalization (guide) or Dropout (guide). Note, however, that those “layers” behave differently when training and when predicting on test set.
Dropout:
- During training: drop units randomly with probability p and multiply everything by 1/(1-p)
- During final predicton: do nothing; pretend there’s no dropout
Batch normalization
- During training, it substracts mean-over-batch and divides by std-over-batch and updates mean and variance.
- During final prediction, it uses accumulated mean and variance.