版权声明:转载请标明出处,谢谢! https://blog.csdn.net/kdongyi/article/details/84447014
使用roslaunch来启动多个turtlesim节点和一个模仿节点以让一个turtlesim节点来模仿另一个turtlesim节点。
使用roslaunch
- roslaunch可以用来启动定义在launch文件中的多个节点。
- 用法:
$ roslaunch [package] [filename.launch]
- 先切换到beginner_tutorials程序包目录下:
$ roscd beginner_tutorials
- 如果roscd执行失败了,记得设置你当前终端下的ROS_PACKAGE_PATH环境变量
- 设置方法如下:
$ export ROS_PACKAGE_PATH=~/<distro>_workspace/sandbox:$ROS_PACKAGE_PATH
$ roscd beginner_tutorials
- 如果你仍然无法找到beginner_tutorials程序包,说明该程序包还没有创建,那么请返回到ROS/Tutorials/CreatingPackage教程,并按照创建程序包的操作方法创建一个beginner_tutorials程序包。
- 然后创建一个launch文件夹:
$ mkdir launch
$ cd launch
Launch 文件
- 现在我们来创建一个名为turtlemimic.launch的launch文件并复制粘贴以下内容到该文件里面:
1 <launch> 2 3 <group ns="turtlesim1"> 4 <node pkg="turtlesim" name="sim" type="turtlesim_node"/> 5 </group> 6 7 <group ns="turtlesim2"> 8 <node pkg="turtlesim" name="sim" type="turtlesim_node"/> 9 </group> 10 11 <node pkg="turtlesim" name="mimic" type="mimic"> 12 <remap from="input" to="turtlesim1/turtle1"/> 13 <remap from="output" to="turtlesim2/turtle1"/> 14 </node> 15 16 </launch>
Launch 文件解析
- 现在我们开始逐句解析launch xml文件。
<launch>
- 在这里我们以launch标签开头以表明这是一个launch文件。
3 <group ns="turtlesim1"> 4 <node pkg="turtlesim" name="sim" type="turtlesim_node"/> 5 </group> 6 7 <group ns="turtlesim2"> 8 <node pkg="turtlesim" name="sim" type="turtlesim_node"/> 9 </group>
- 在这里我们创建了两个节点分组并以'命名空间(namespace)'标签来区分,其中一个名为turtulesim1,另一个名为turtlesim2,两个组里面都使用相同的turtlesim节点并命名为'sim'。
- 这样可以让我们同时启动两个turtlesim模拟器而不会产生命名冲突。
11 <node pkg="turtlesim" name="mimic" type="mimic"> 12 <remap from="input" to="turtlesim1/turtle1"/> 13 <remap from="output" to="turtlesim2/turtle1"/> 14 </node>
- 在这里我们启动模仿节点,并将所有话题的输入和输出分别重命名为turtlesim1和turtlesim2,这样就会使turtlesim2模仿turtlesim1。
</launch>
- 这个是launch文件的结束标签。
roslaunching
- 现在让我们通过roslaunch命令来启动launch文件:
$ roslaunch beginner_tutorials turtlemimic.launch
- 现在将会有两个turtlesims被启动,然后我们在一个新终端中使用rostopic命令发送速度设定消息:
$ rostopic pub /turtlesim1/turtle1/command_velocity turtlesim/Velocity -r 1 -- 2.0 -1.8
$ rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
- 你会看到两个turtlesims会同时开始移动,虽然发布命令只是给turtlesim1发送了速度设定消息。

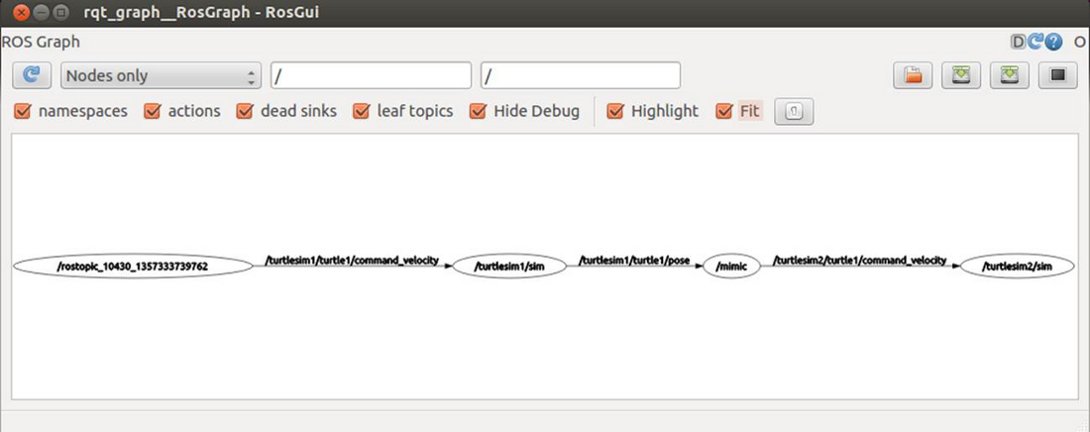
- 我们也可以通过rqt_graph来更好的理解在launch文件中所做的事情。
- 运行rqt并在主窗口中选择rqt_graph:
$ rqt
- 或者直接运行:
$ rqt_graph
-
效果: