** ROS学习笔记----->ROS基础------->第一个ros例程(小海龟仿真)
day 2 2019/1/21 帅某 南京工程学院**
本笔记根据胡春旭老师教程记下,胡老师辛苦了,讲的特别棒,收获很大。谢谢胡老师
1.打开终端一 ----->启动ros master
roscore

2.打开终端二---->启动小海龟仿真器
因为ros有很多版本,每次启动都是随机一个版本的小海龟。
rosrun turtlesim turtlesim_node
turtlesim :功能包名字
turtlesim_node:节点名字


3.打开终端三------->启动海龟控制节点
rosrun turtlesim turtle_teleop_key

按键上:前进;下:后退;左:向左旋转一定角度;右:向右旋转一定角度。
4.例程分析和一些命令分析:
命令一: rqt_graph ,打开计算图
点击:debu按钮,显示主要节点
命令二: rosnode list 列出当前所有节点

rosout:所有程序都会出现,作用订阅所有节点信息
teleop_turtle:键盘节点
turtlesim:海龟节点
命令三:
rosnode info /+节点
如:rosnode info /turtlesim

由图片可以看出,节点名字,发布者,订阅者,提供的服务
命令四:
rostopic list
订阅某个话题,如
rostopic info /turtle/cmd_vel
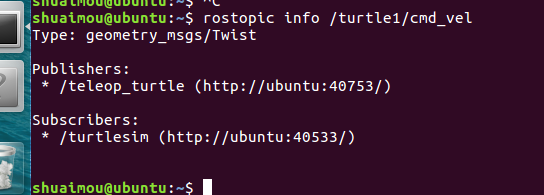
可以看到发布者节点,就接受者节点
命令五:
rostopic echo /+节点
如监听海龟节点:
rostopic echo /turtle/cmd_vel
移动海龟,就可以看到打印的信息。

打印出来线速度liner和角速度angular。
命令六:
rostopic -r 10 pub /turtle/cmd_vel geometry_msg/Twist +table键
功能:改变参数后,向前运动10次。
命令七:
rosservie call list
如:
rosservie call /spawn+table
设置一些基本的参数之后,新建一只海龟。

命令八:rqt_plot
订阅海龟,即可视化海龟运动轨迹。
移动海龟,即可输出波形:

5.ROS开发的应用框架:
