版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
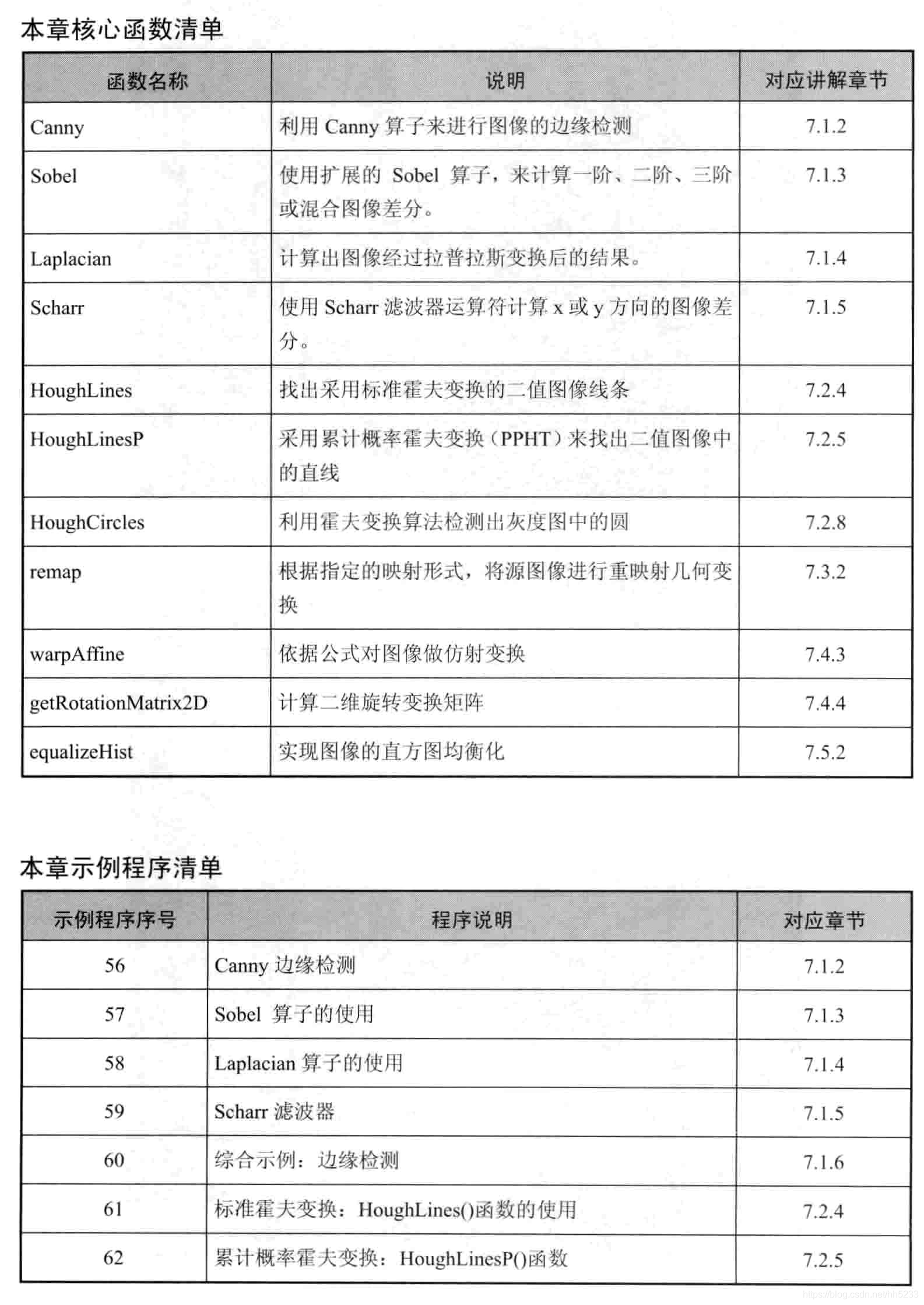
1.opencv中的边缘检测
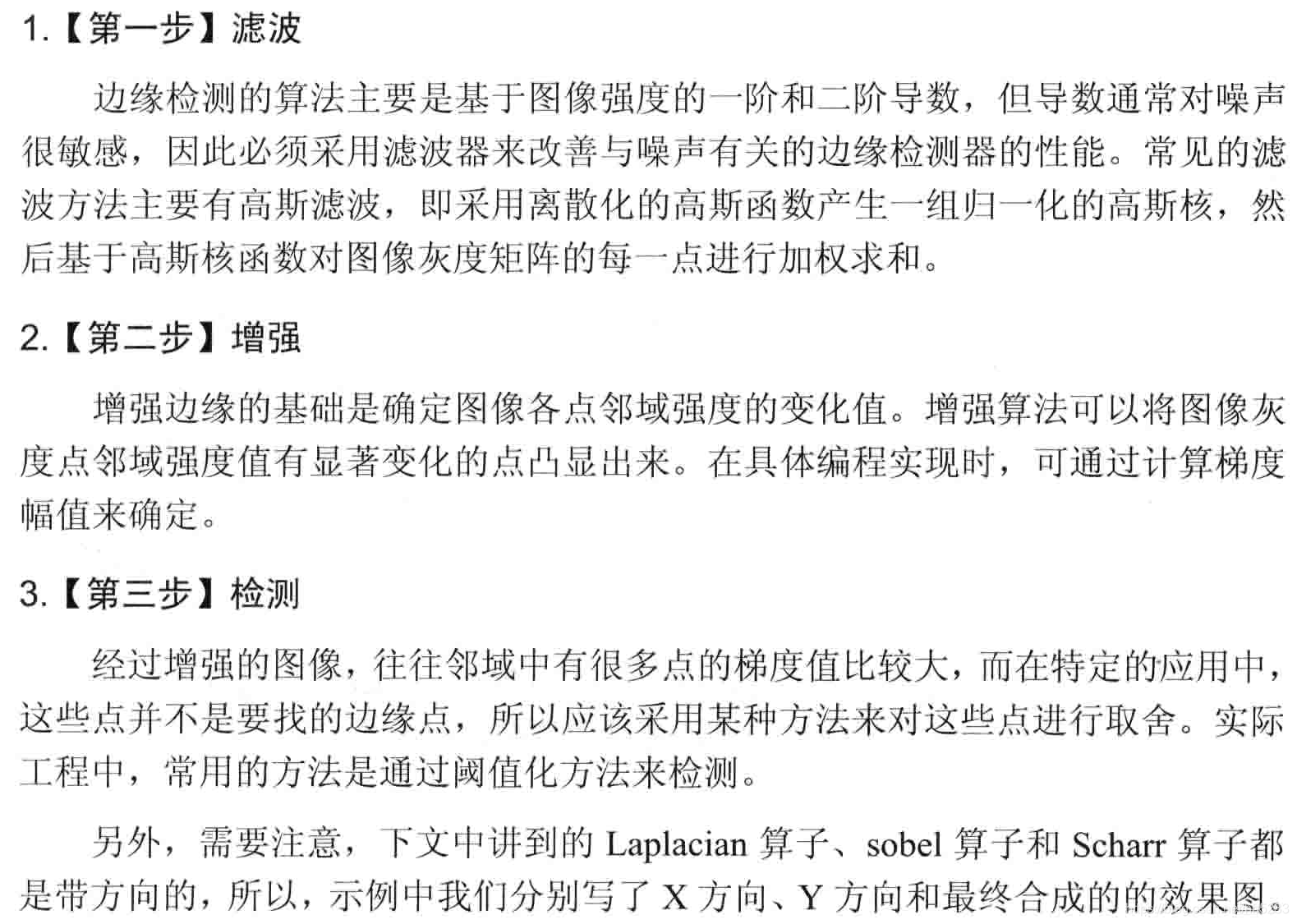
(1)边缘检测的一般步骤
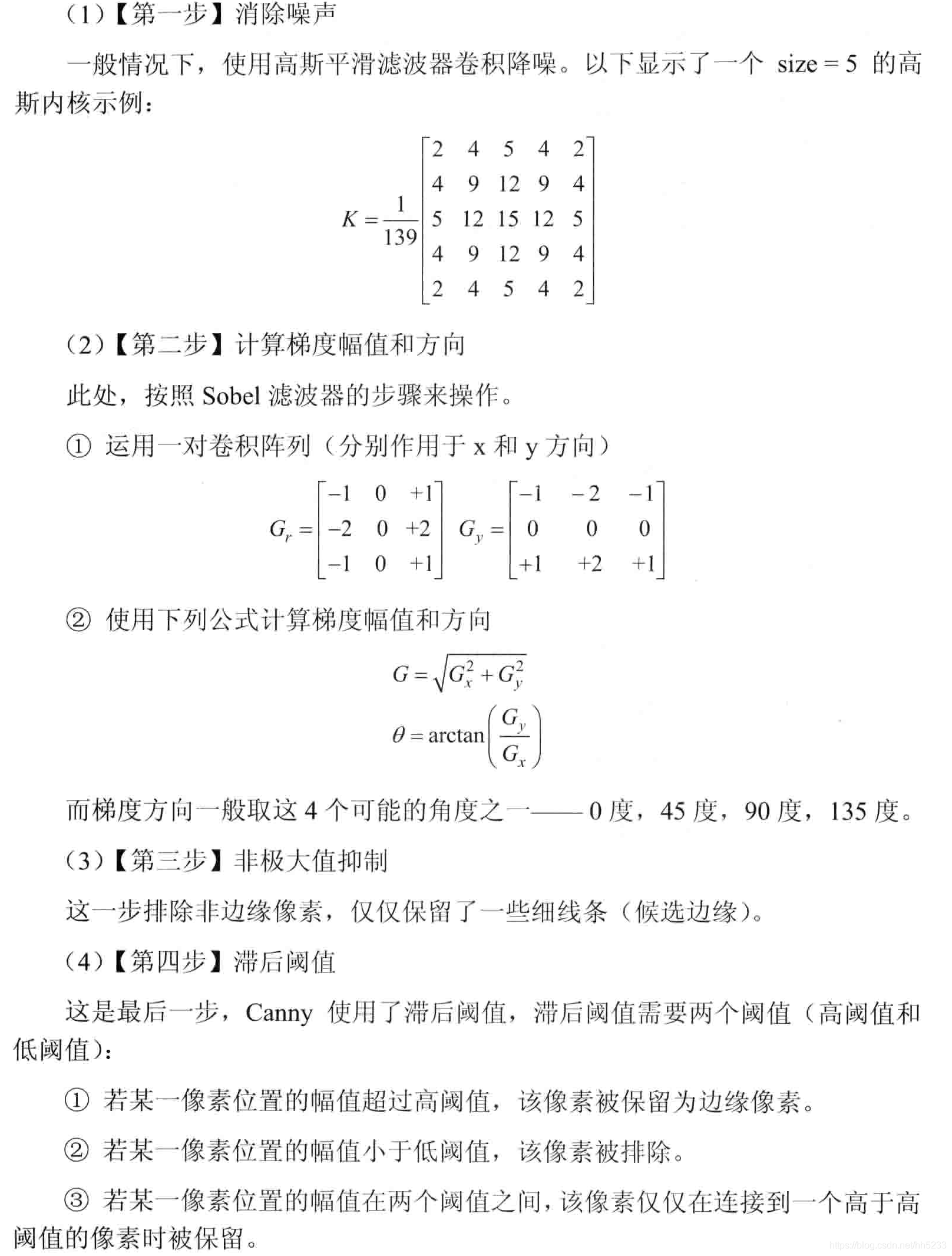
(2)canny算子
1.三个评价标准


2.编程步骤/思路
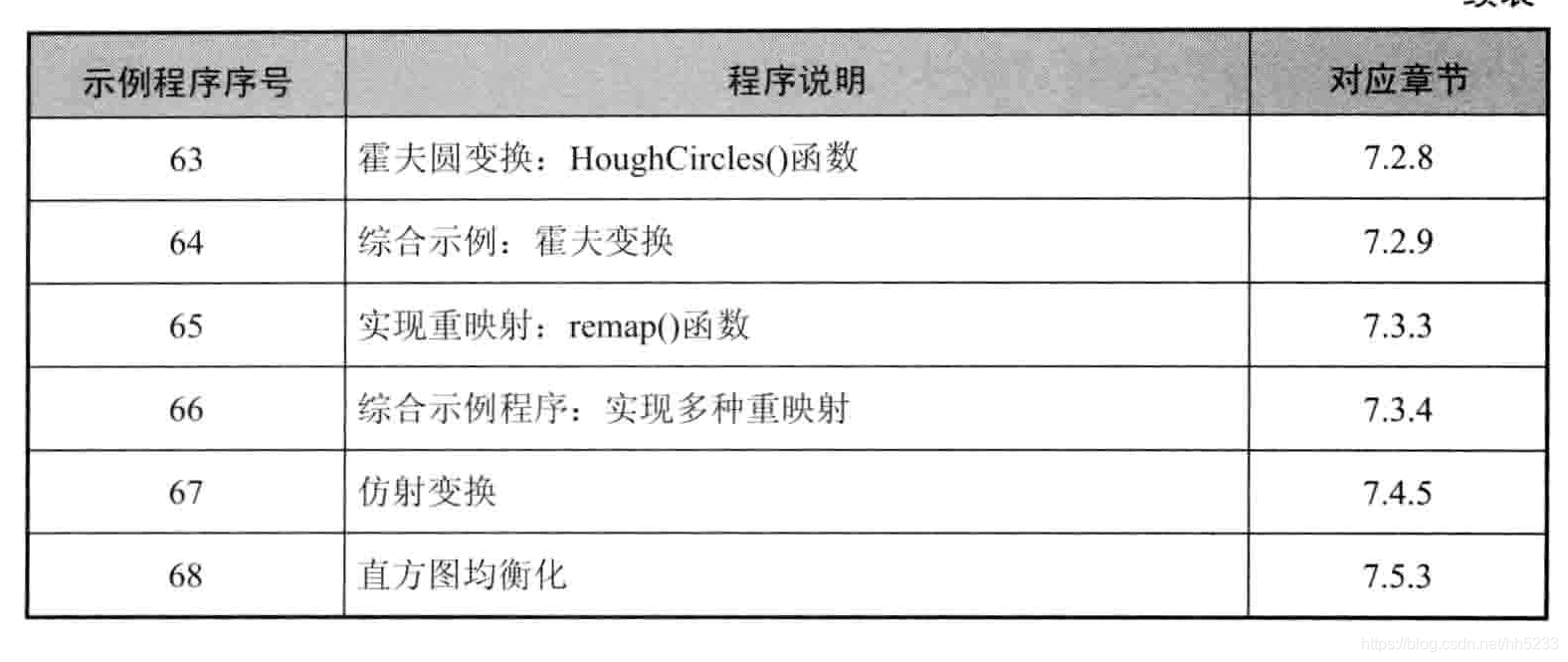
3.函数使用

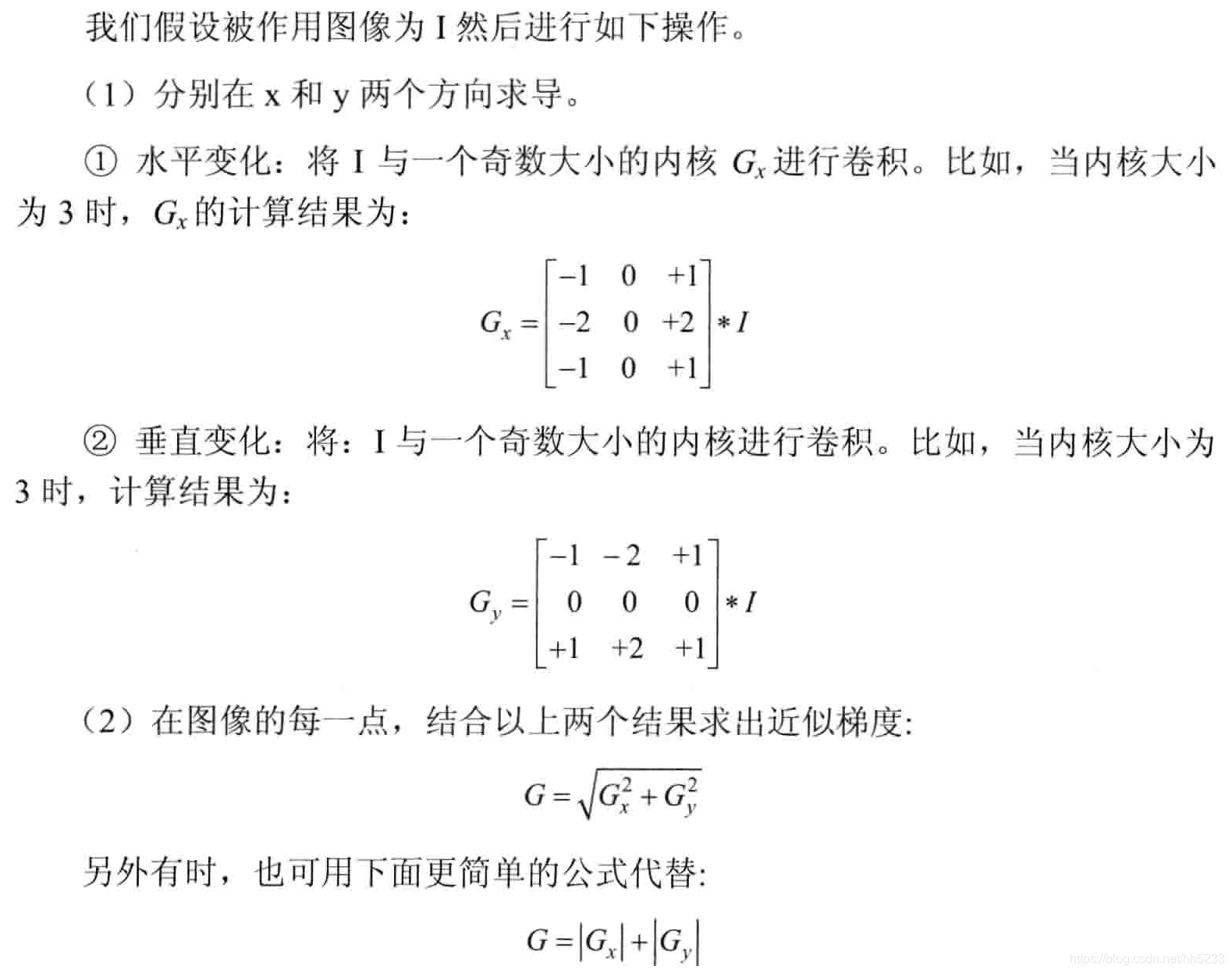
(3)sober算子

1.计算过程/编程步骤
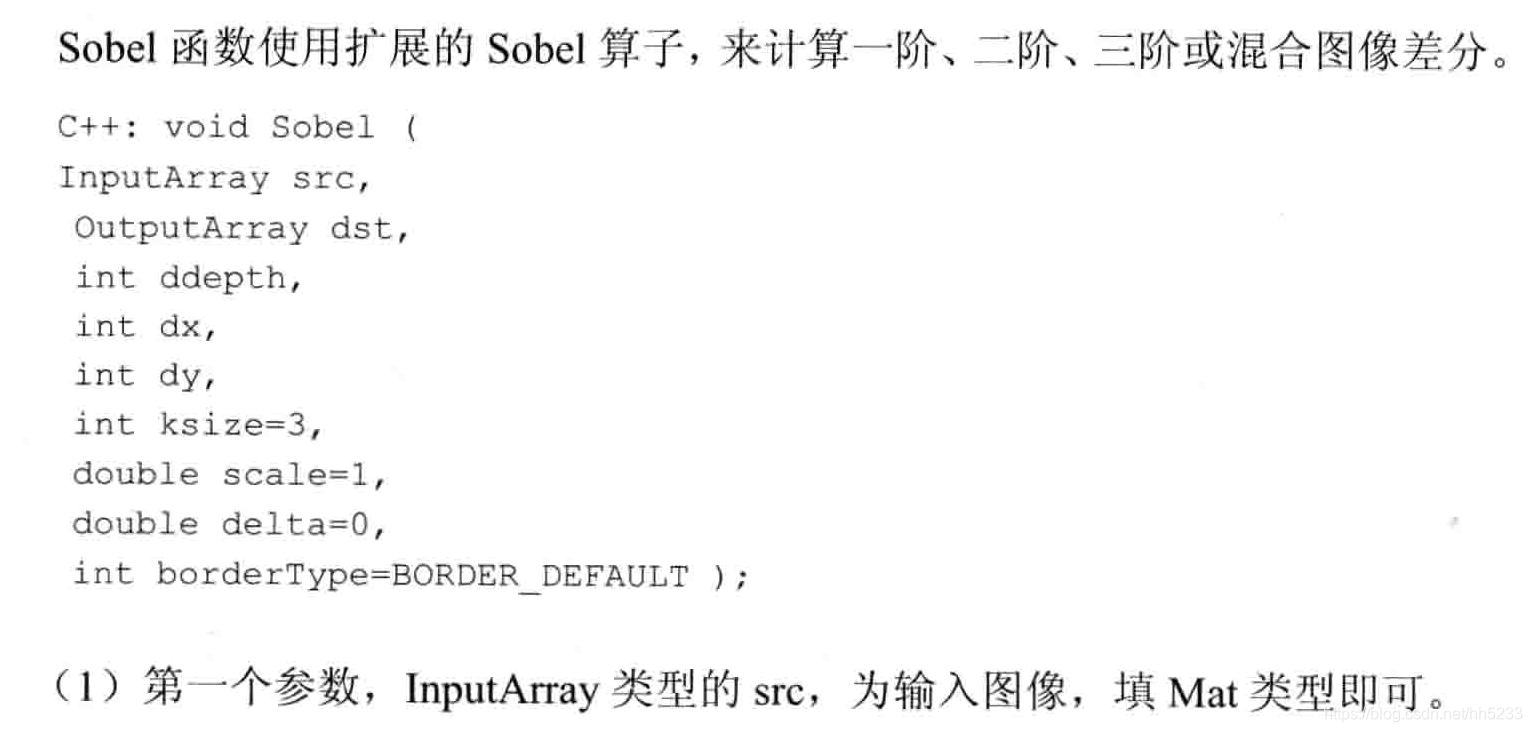
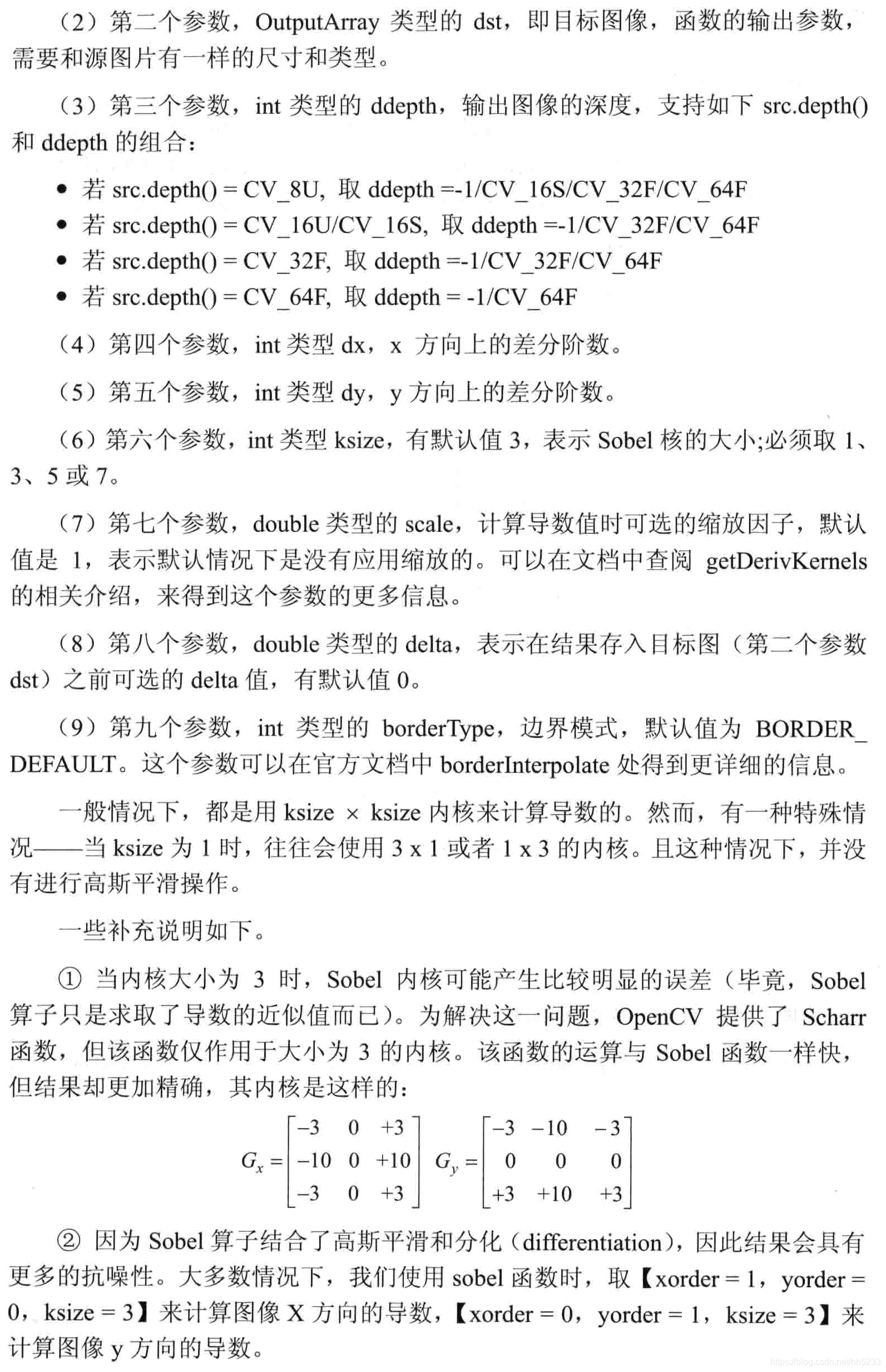
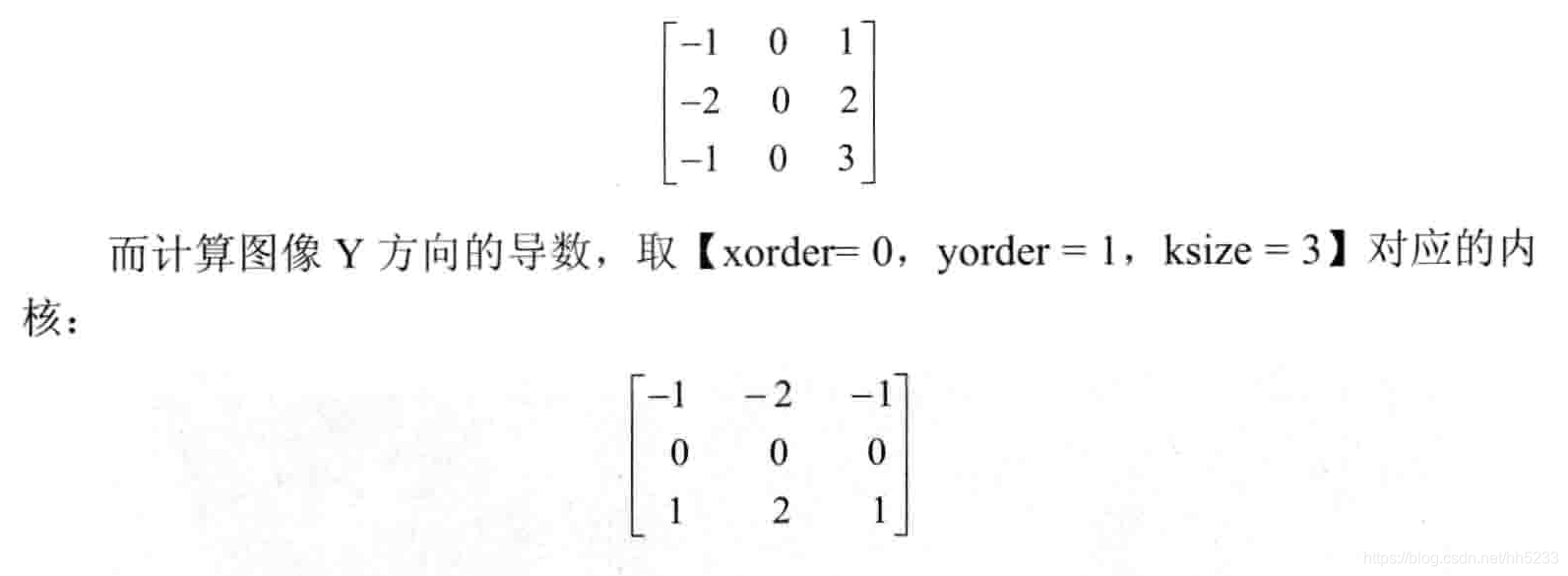
2.sober()函数
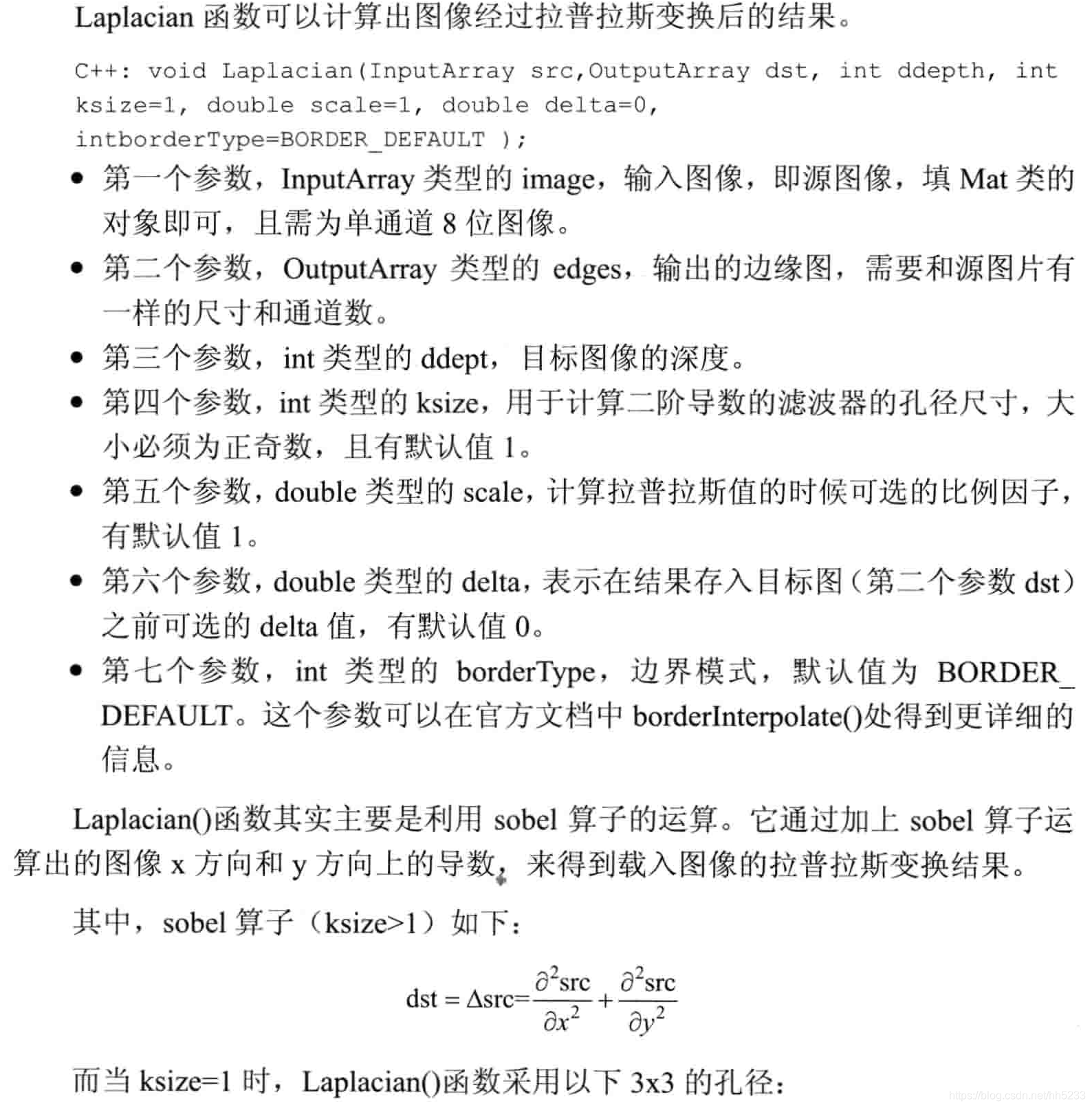
(4)Laplacian算子


1.Laplacian()函数

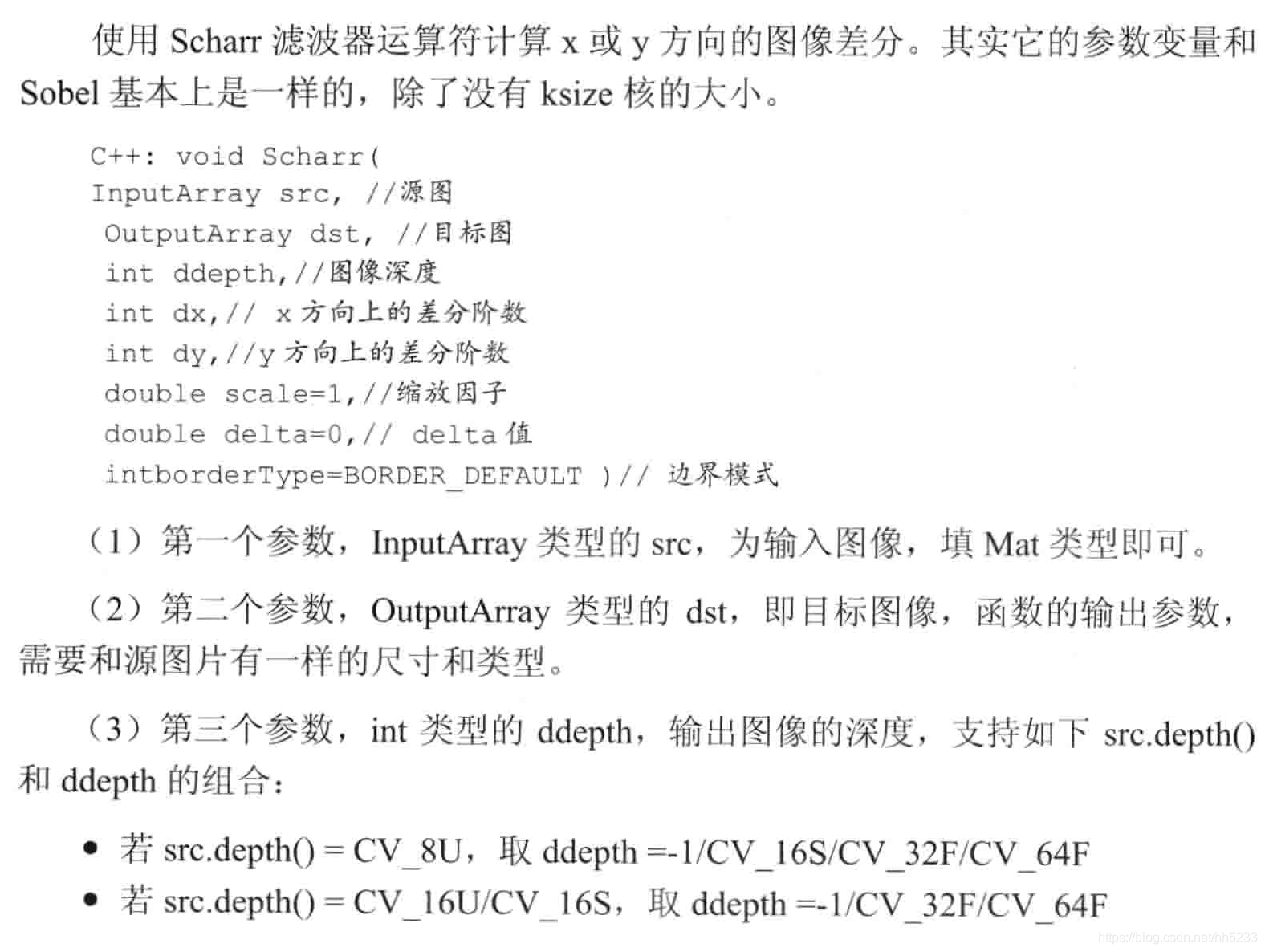
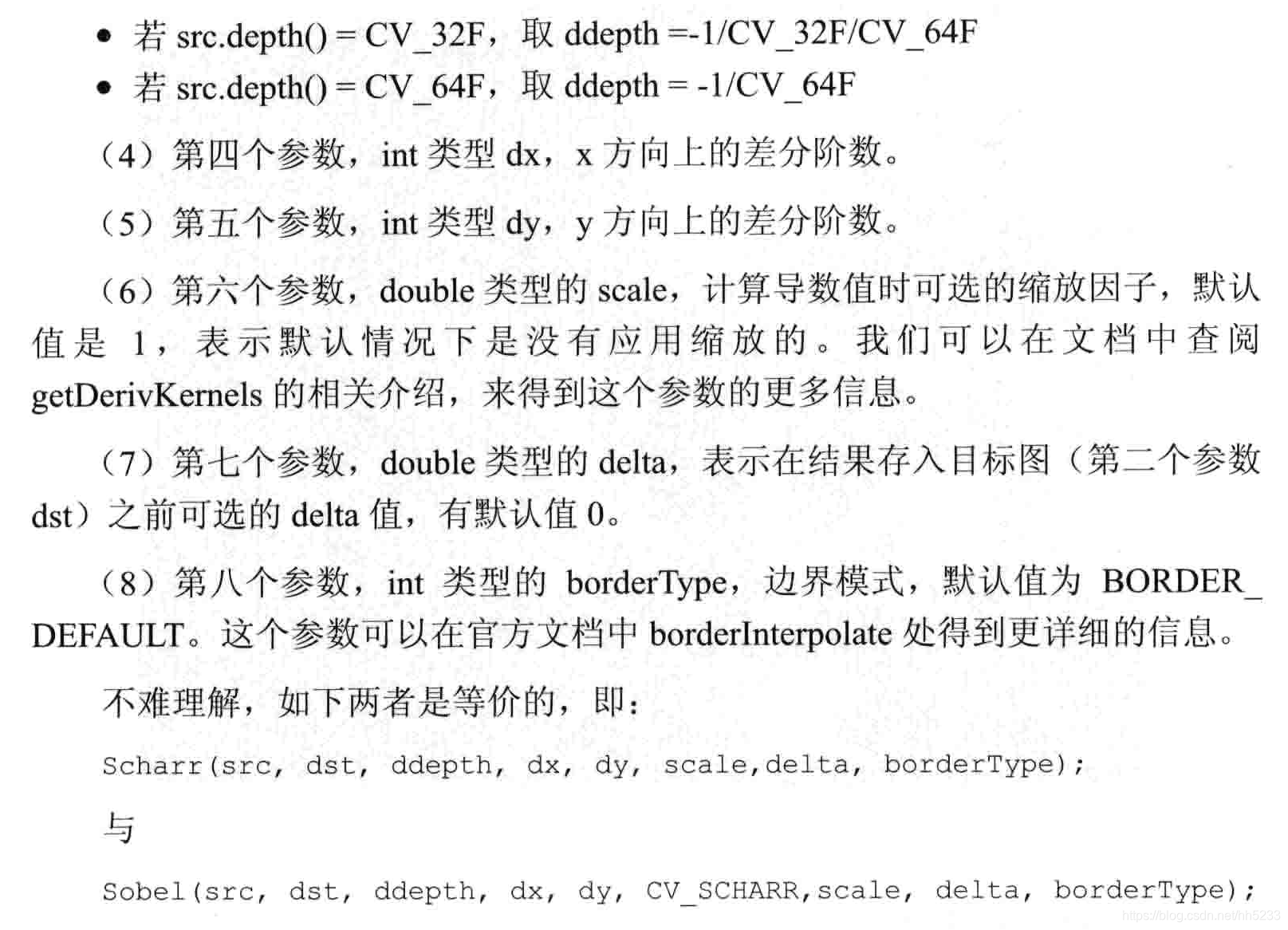
(5).scharr滤波器:opencv中主要是配合sober算子
1.计算图像差分:scharr()函数
2.霍夫变换–直线,圆,椭圆检测
(1)opencv中的霍夫线变换

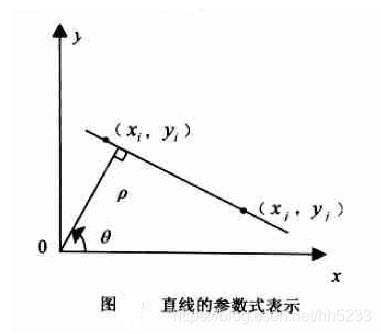
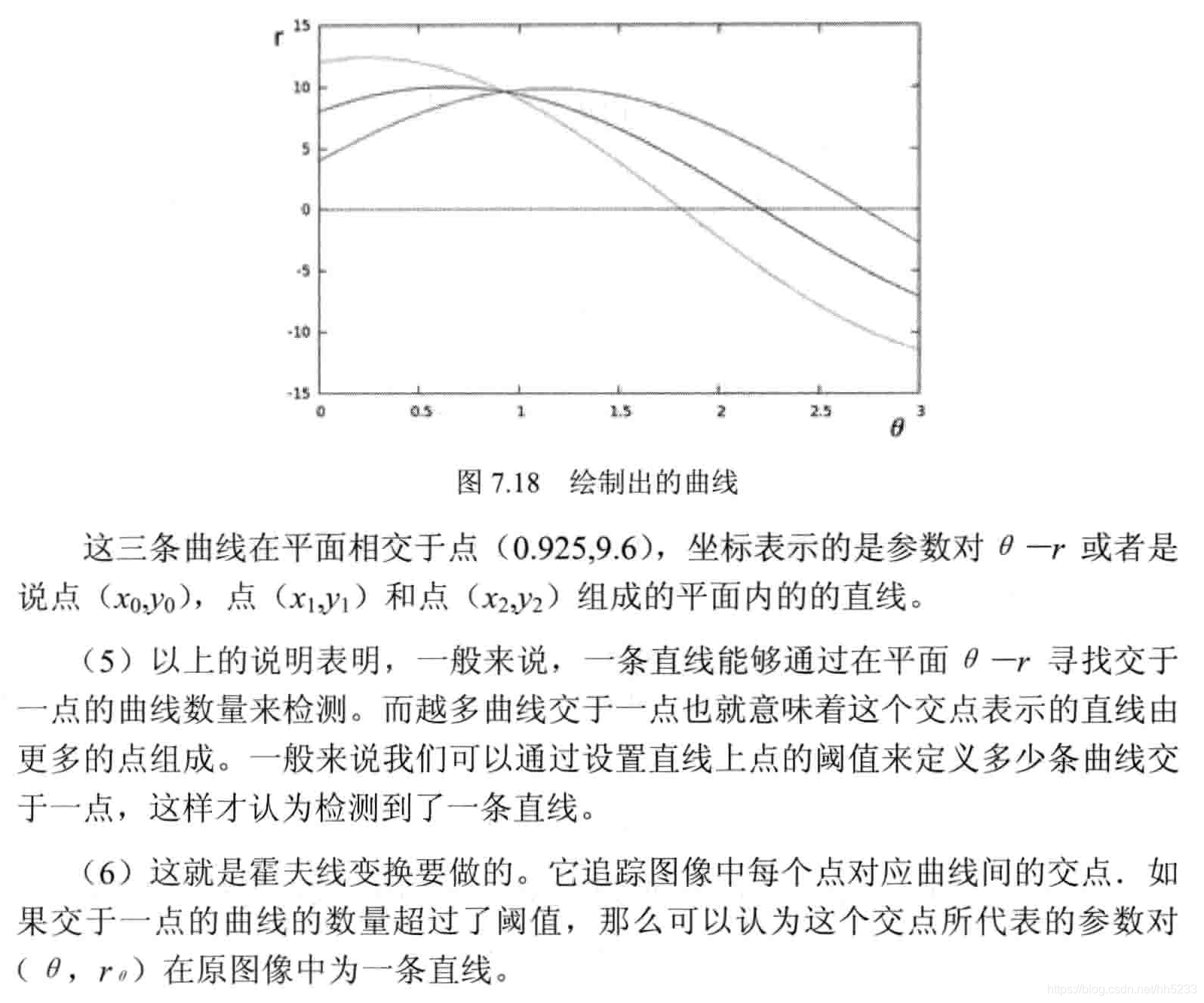
霍夫变换原理:
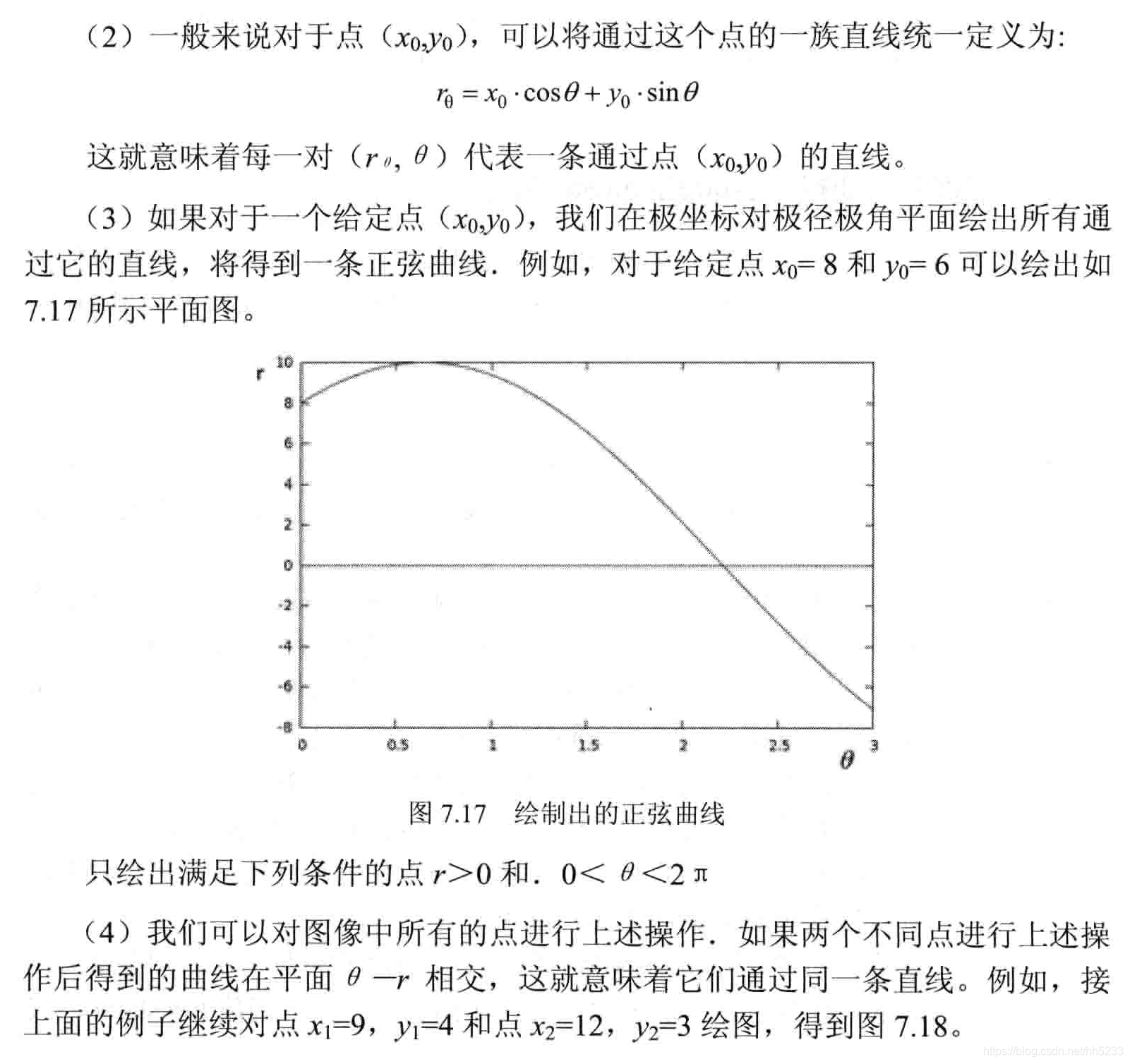
极坐标下一对(ρ0,θ0)确定一条直线(垂直才算是ρ)
(2)标准霍夫变换:HoughLines() 函数

编程中求取x1,y1,x2,y2的公式(x1=x0-1000*b)原理:(https://blog.csdn.net/cv_yuippe/article/details/8967390)
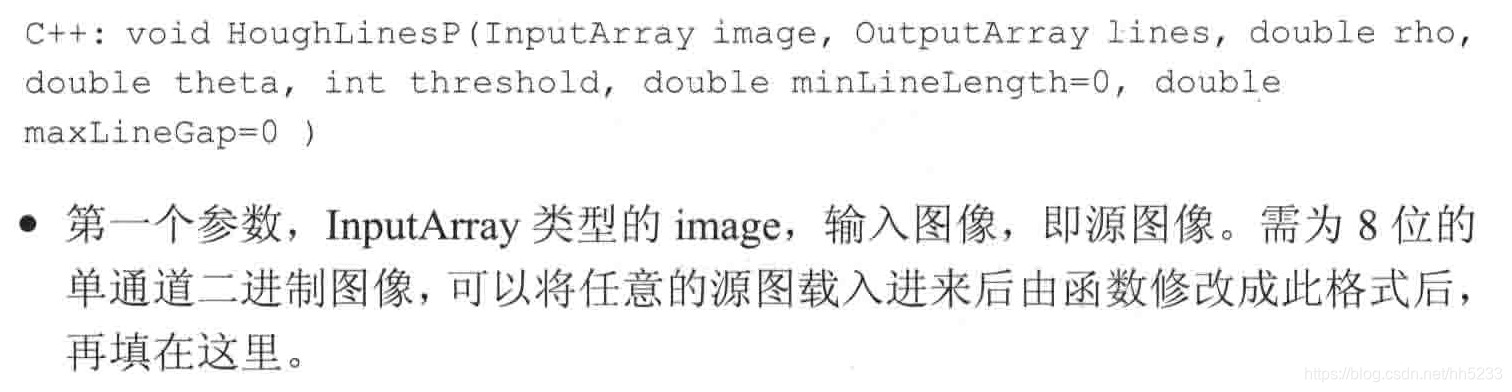
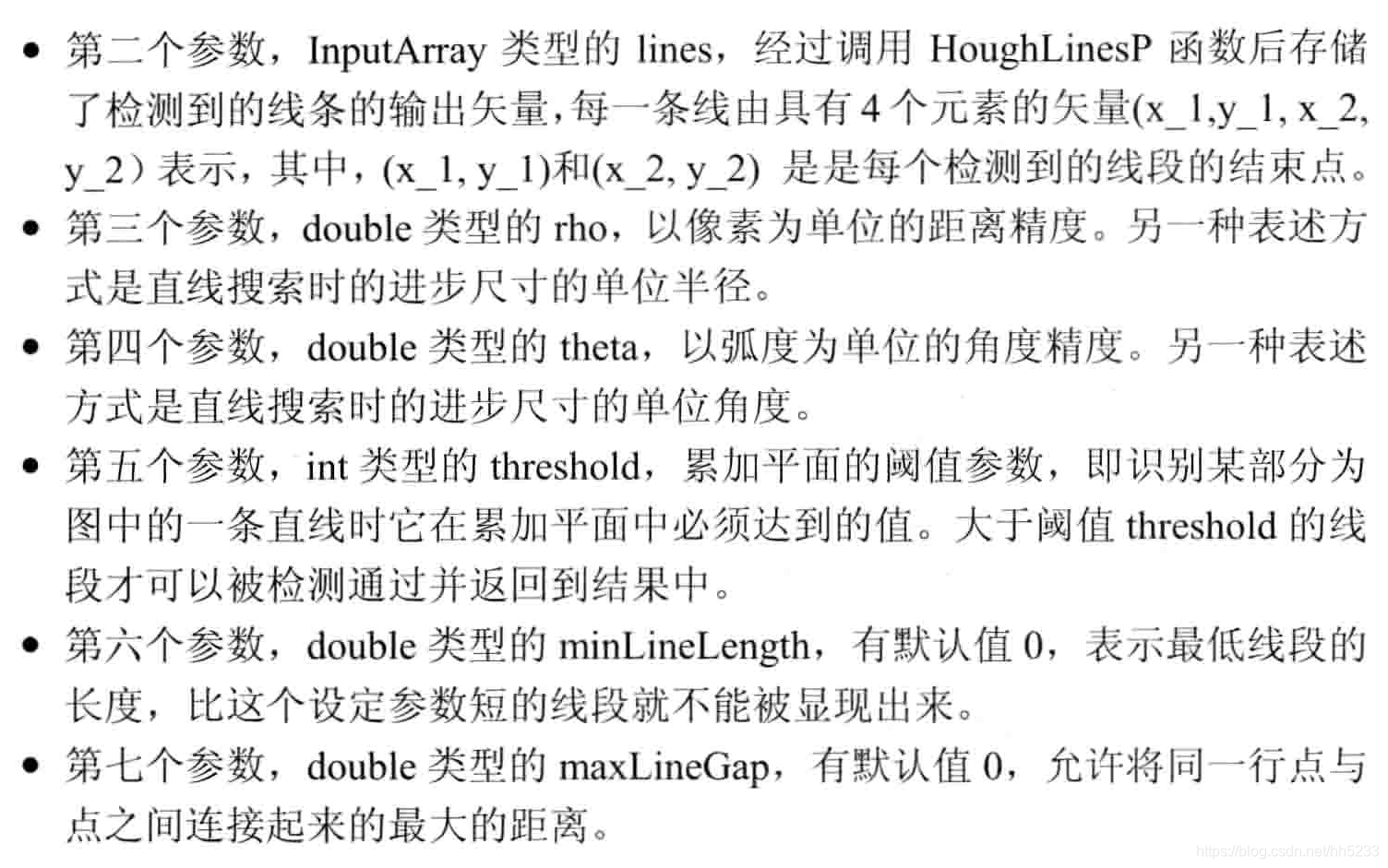
(3)累计概率霍夫变换:HoughLinesP()函数
(4)霍夫圆检测:HoughCircles()函数

3.重映射
(1)概念

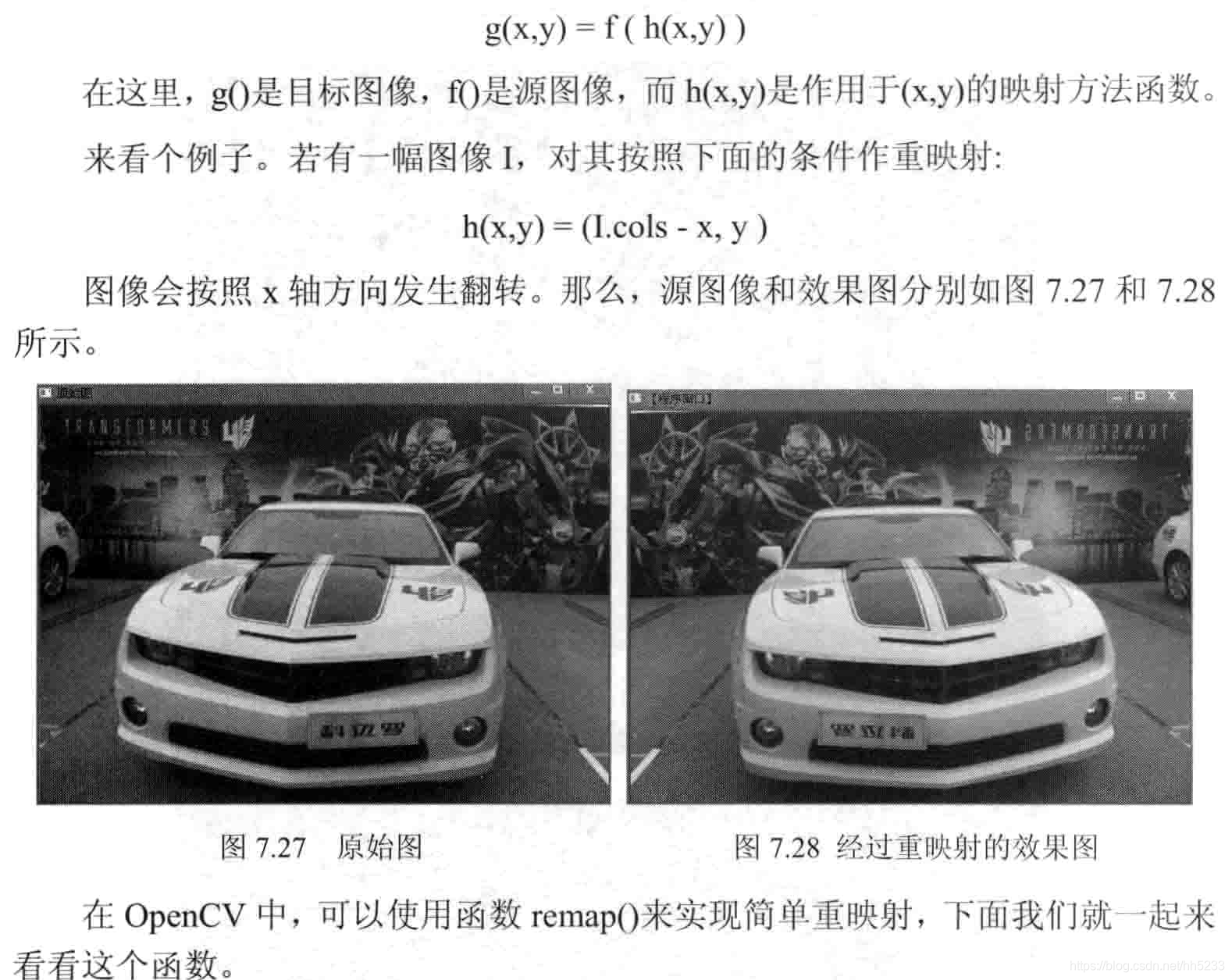
(2)实现重映射函数:remap()–将图片进行几何变换
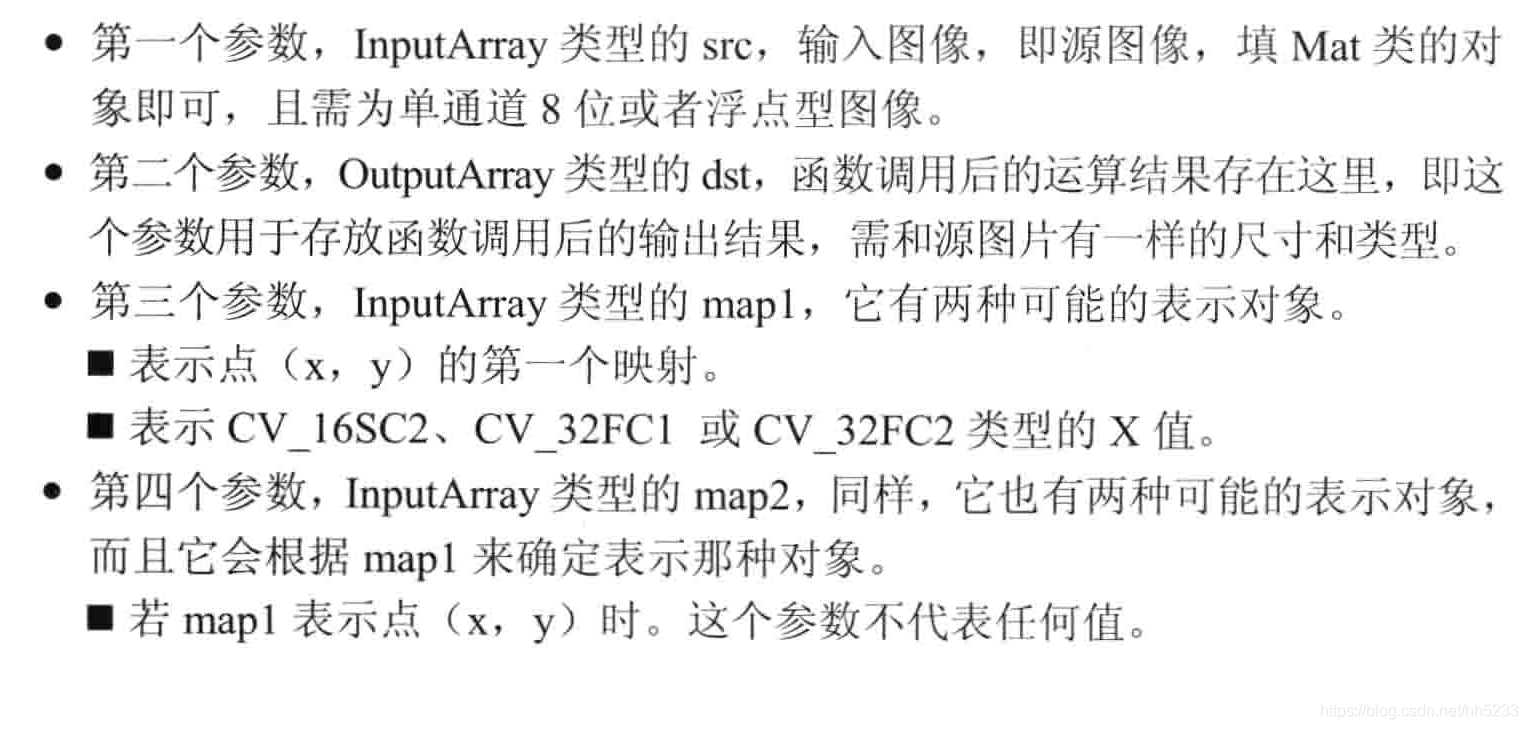
函数中最重要的参数是两个Mat类型mat1,mat2.其取值(根据变换公式)决定了图像的具体变化!
4.仿射变换
以2*3矩阵形式为例,变换公式为

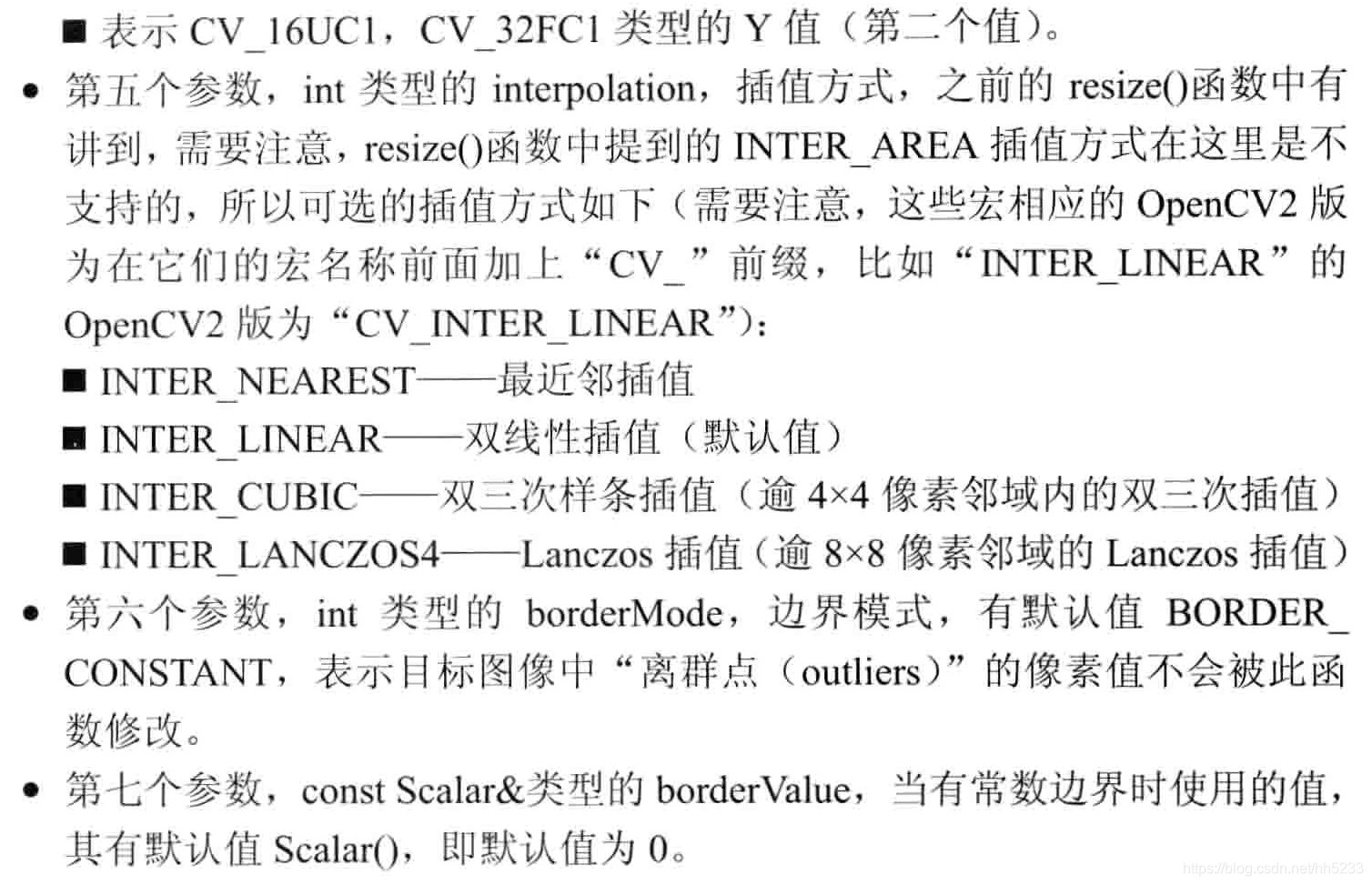
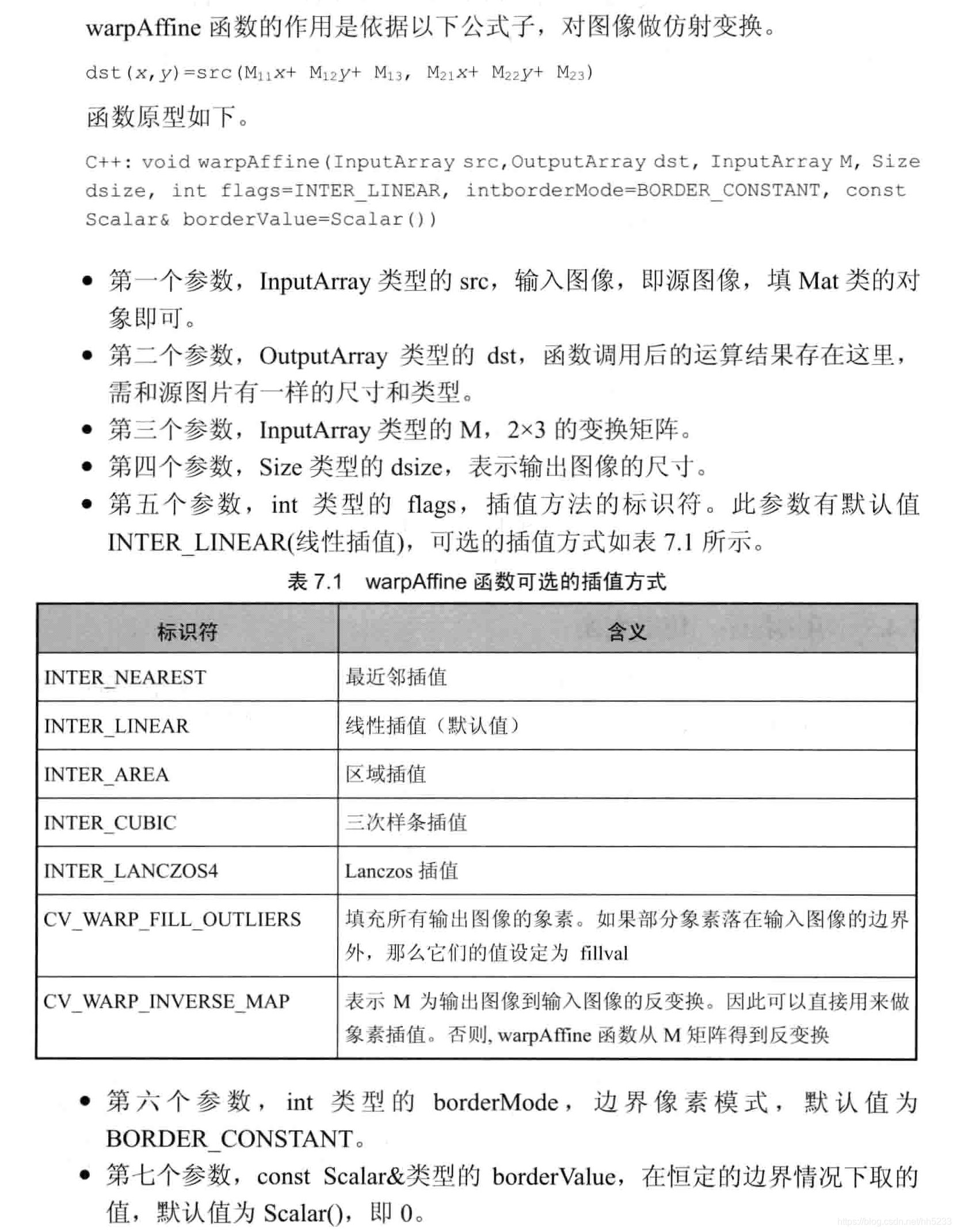
(1)仿射变换函数:warpAffine()函数
WarpAffine函数与cvGetQuadrangleSubPix函数类似,但不相同

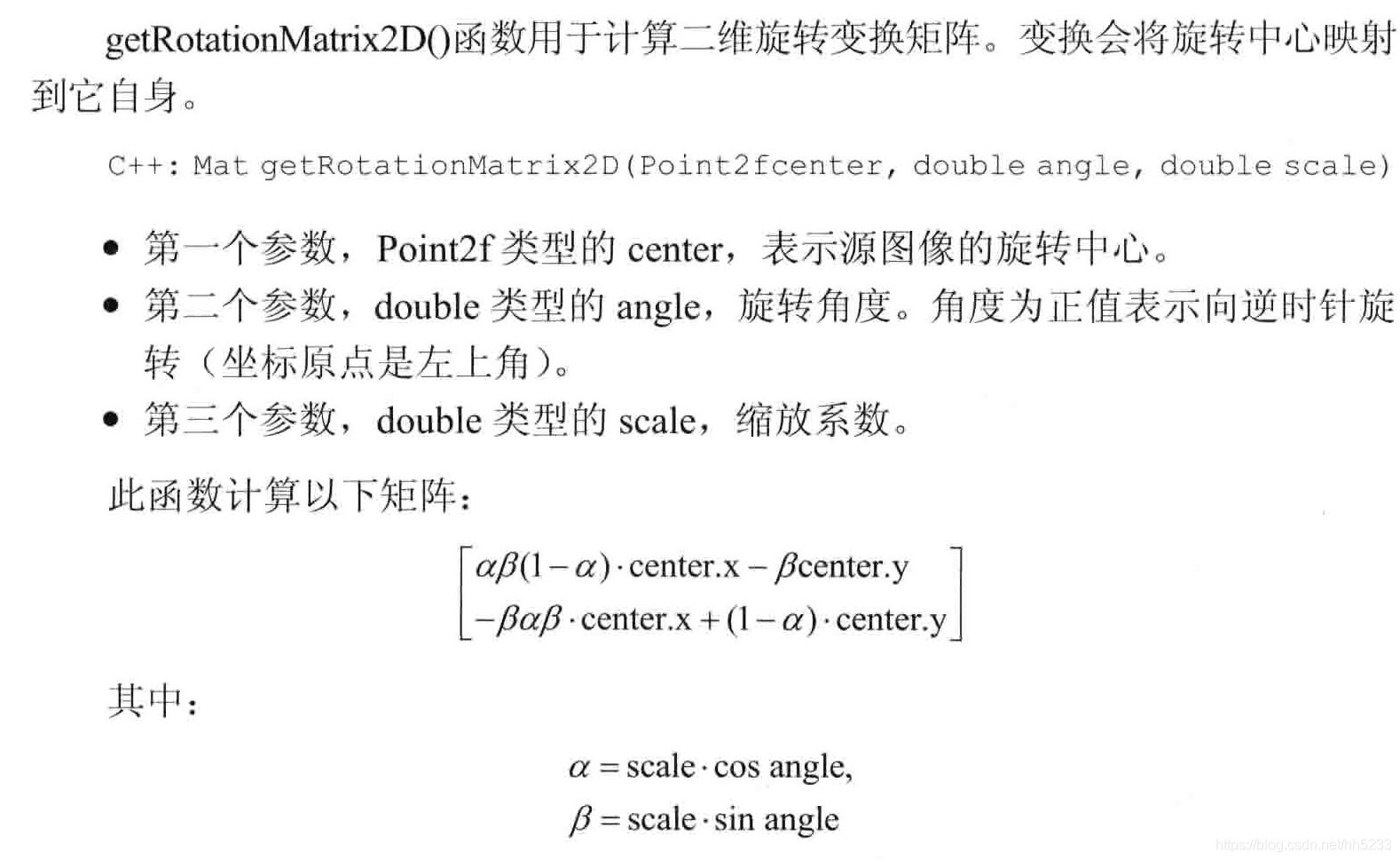
(2)计算二维旋转变换矩阵:getRotationMatrix2D()函数
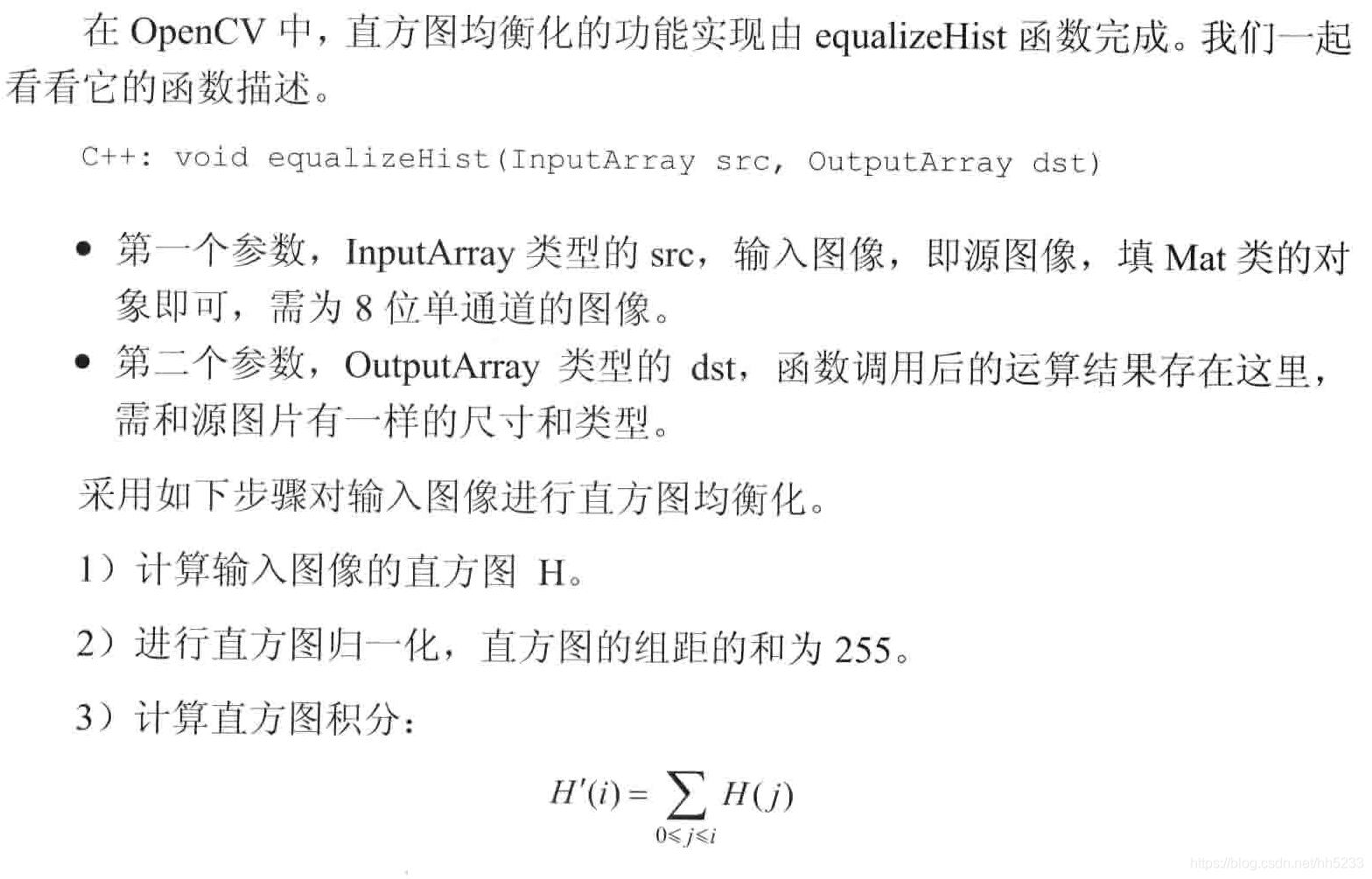
5.直方图均衡化–增强对比度

(1) 实现直方图均衡化:equalizeHist()函数

本章总结