【图像处理】像素坐标系、像平面坐标系、相机坐标系、世界坐标系、内参矩阵、外参矩阵
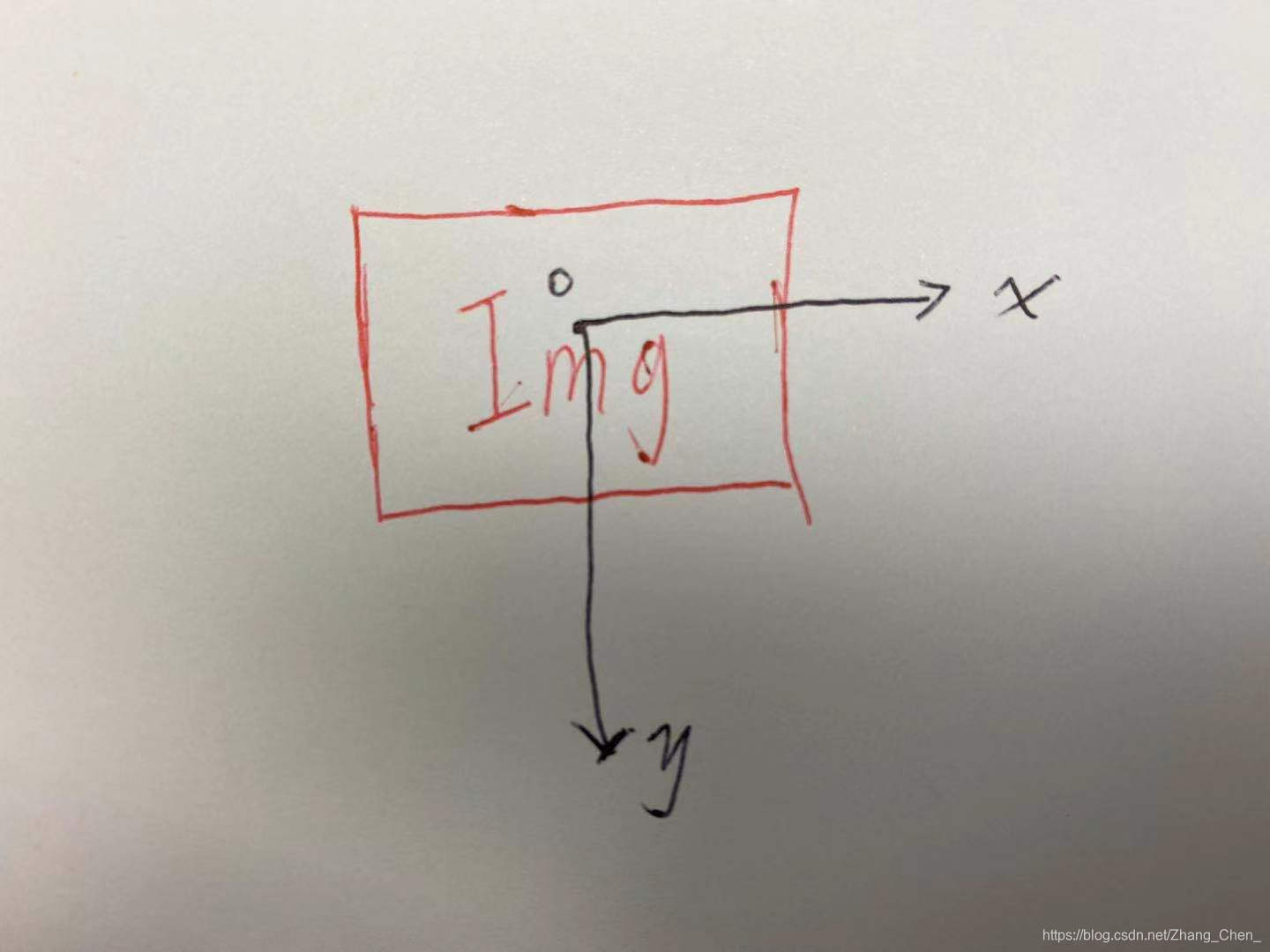
像素坐标系
以图像左上角为原点建立以像素为单位的直接坐标系
。横轴为
,向右为正方向;纵轴为
,向下为正方向
和
代表像素的行数和列数,没有物理单位

像平面坐标系
像平面坐标系
是以影像几何中心
为原点,
、
轴方向分别为平行于影像画幅边缘线的二维坐标系
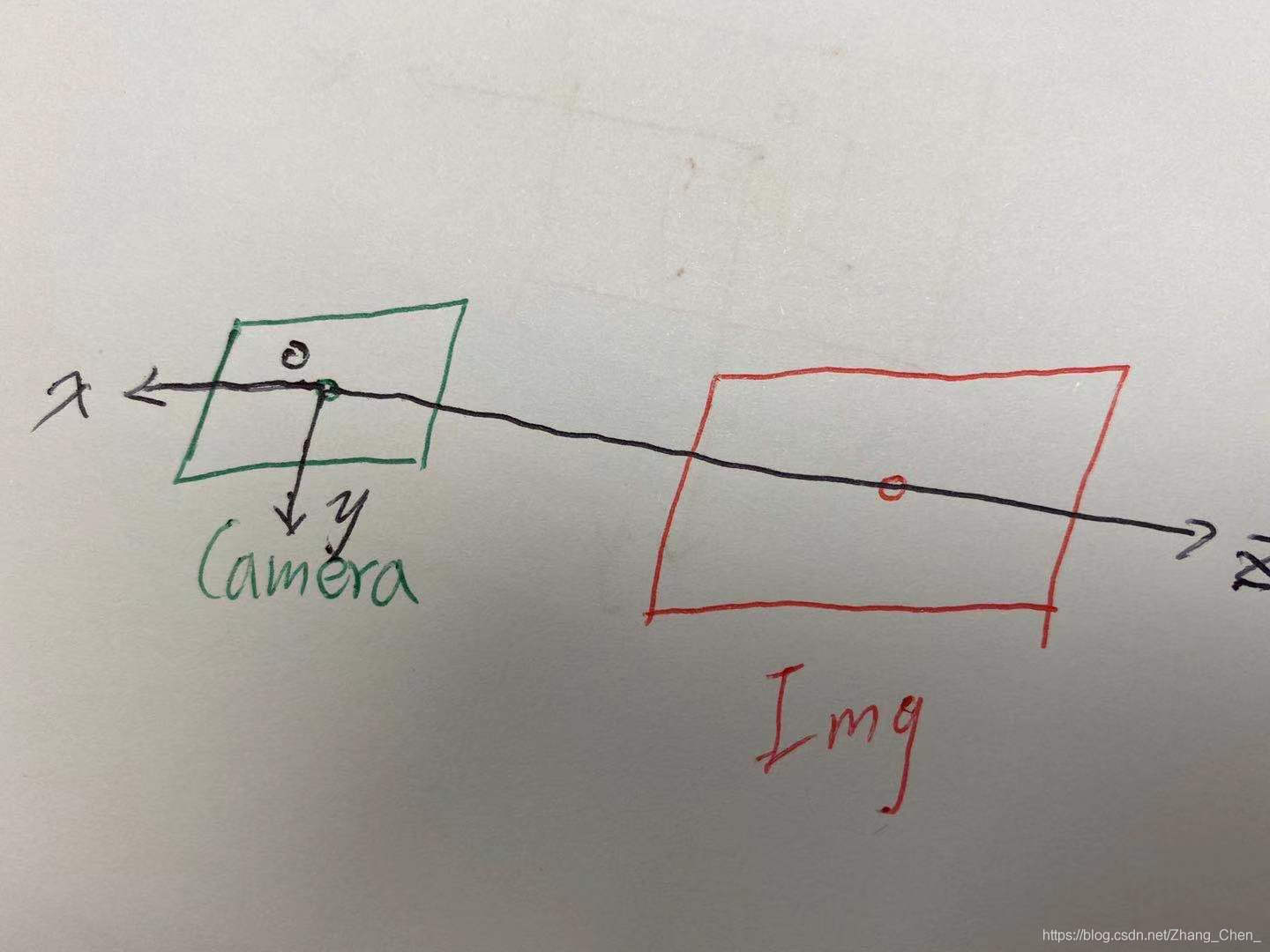
相机坐标系
相机坐标系
是以摄像机光心为原点(在针孔模型中也就是针孔为光心),z轴与光轴重合也就是z轴指向相机的前方(也就是与成像平面垂直),x轴与y轴的正方向与像平面坐标系平行的三维直角坐标系
世界坐标系
由于摄像机可安放在环境中的任意位置,在环境中选择一个基准坐标系来描述摄像机的位置,并用它描述环境中任何物体的位置,该坐标系称为世界坐标系
。
相机坐标系与世界坐标系之间的关系可以用旋转矩阵与平移向量来描述。
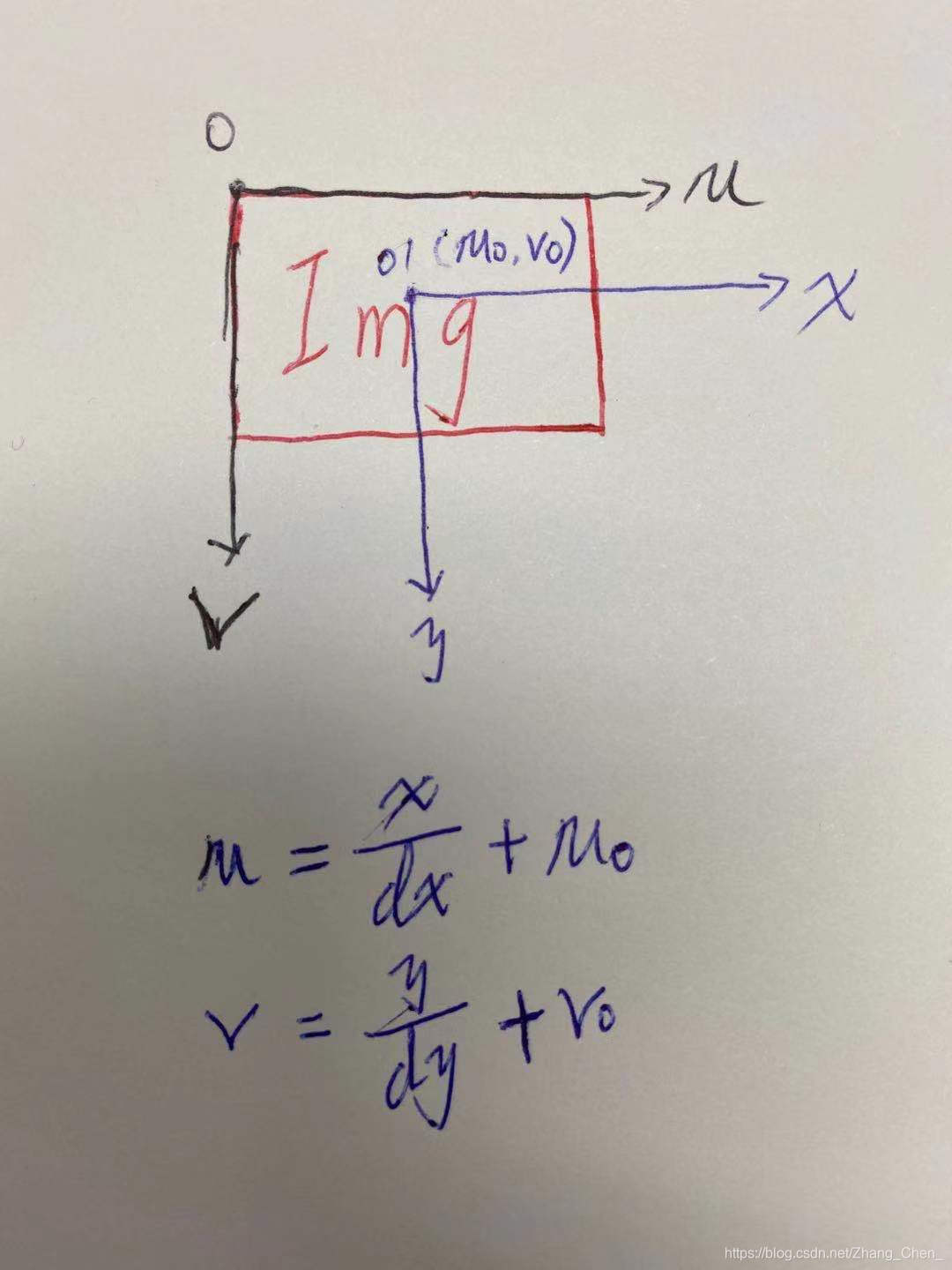
像素坐标系<==>像平面坐标系
假设
代表
在
坐标系下的坐标,
与
分别表示每个像素在像平面坐标系横轴
和纵轴
上的物理尺寸
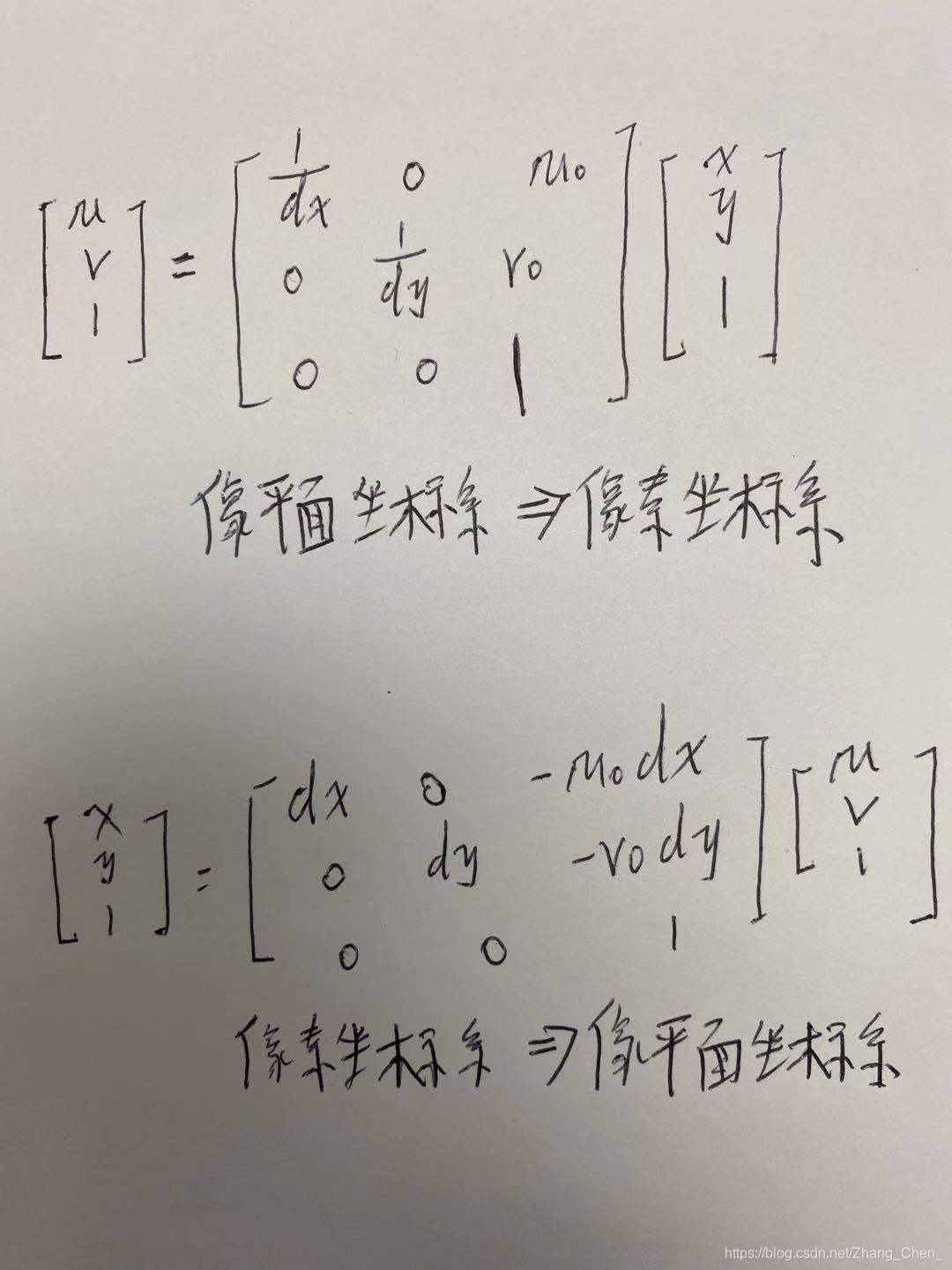
则像素坐标系和像平面坐标系有如下关系:
写成矩阵形式,就是:
相机坐标系<==>像平面坐标系
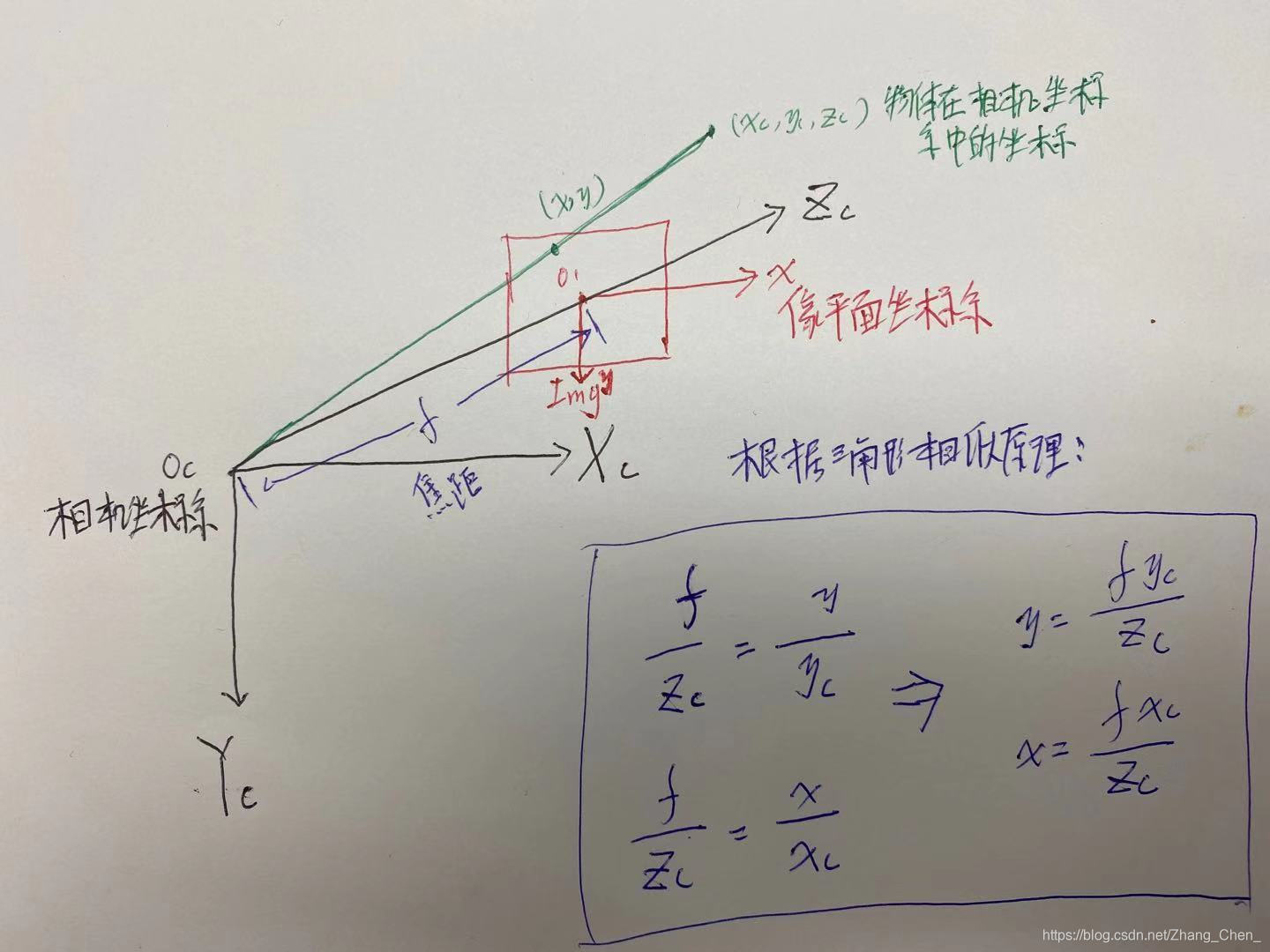
写成矩阵形式,就是:

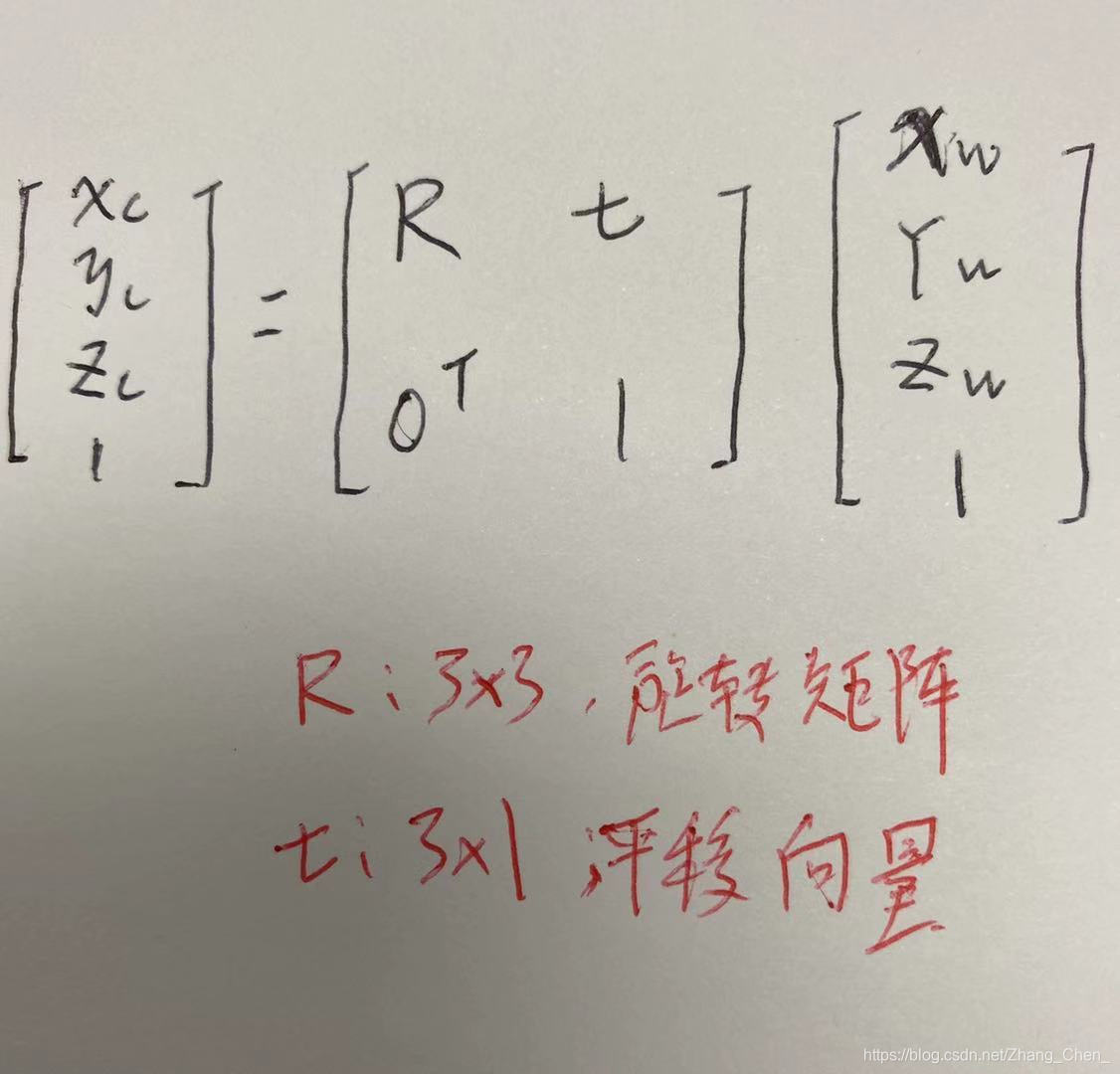
相机坐标系<==>世界坐标系
世界坐标系是为了描述相机的位置而被引入的。
平移向量
和旋转矩阵
可以用来表示相机坐标系与世界坐标系的关系。
所以,假设空间点
在世界坐标系下的齐次坐标是
,在相机坐标系下的齐次坐标是
,则存在如下关系:
像素坐标系<==>世界坐标系

结语
如果您有修改意见或问题,欢迎留言或者通过邮箱和我联系。
手打很辛苦,如果我的文章对您有帮助,转载请注明出处。
