Unsupervised Representation Learning with Deep Convolutional Generative Adversarial Networks
Paper:https://arxiv.org/pdf/1511.06434v2.pdf
Code:https://github.com/znxlwm/tensorflow-MNIST-GAN-DCGAN
Tips:ICLR2016的一篇paper;Code是非官方的。
(阅读笔记)
1.Main idea
- 将卷积神经网络和GAN联系了起来。We introduce a class of CNNs called deep convolutional generative adversarial networks (DCGANs).(全文感觉就这是这个idea)
- 实验效果很好。Training on various image datasets, we show convincing evidence that our deep convolutional adversarial pair learns a hierarchy of representations from object parts to scenes in both the generator and discriminator.
2.Details
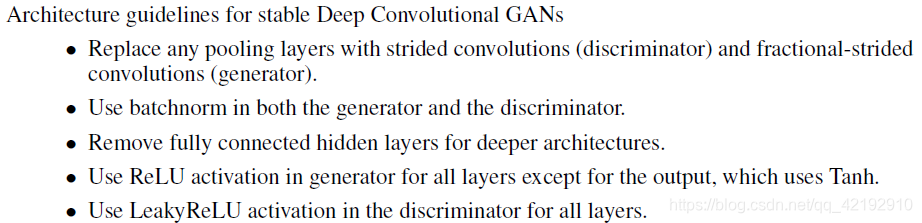
模型的框架说了很多稳定DCGAN的一些操作,直接代码更简单直观。
import os, time, itertools, imageio, pickle
import numpy as np
import matplotlib.pyplot as plt
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
def lrelu(x, th=0.2):
return tf.maximum(th * x, x)
# G(z)
def generator(x, isTrain=True, reuse=False):
with tf.variable_scope('generator', reuse=reuse):
# 1st hidden layer
conv1 = tf.layers.conv2d_transpose(x, 1024, [4, 4], strides=(1, 1), padding='valid')
lrelu1 = lrelu(tf.layers.batch_normalization(conv1, training=isTrain), 0.2)
# 2nd hidden layer
conv2 = tf.layers.conv2d_transpose(lrelu1, 512, [4, 4], strides=(2, 2), padding='same')
lrelu2 = lrelu(tf.layers.batch_normalization(conv2, training=isTrain), 0.2)
# 3rd hidden layer
conv3 = tf.layers.conv2d_transpose(lrelu2, 256, [4, 4], strides=(2, 2), padding='same')
lrelu3 = lrelu(tf.layers.batch_normalization(conv3, training=isTrain), 0.2)
# 4th hidden layer
conv4 = tf.layers.conv2d_transpose(lrelu3, 128, [4, 4], strides=(2, 2), padding='same')
lrelu4 = lrelu(tf.layers.batch_normalization(conv4, training=isTrain), 0.2)
# output layer
conv5 = tf.layers.conv2d_transpose(lrelu4, 1, [4, 4], strides=(2, 2), padding='same')
o = tf.nn.tanh(conv5)
return o
# D(x)
def discriminator(x, isTrain=True, reuse=False):
with tf.variable_scope('discriminator', reuse=reuse):
# 1st hidden layer
conv1 = tf.layers.conv2d(x, 128, [4, 4], strides=(2, 2), padding='same')
lrelu1 = lrelu(conv1, 0.2)
# 2nd hidden layer
conv2 = tf.layers.conv2d(lrelu1, 256, [4, 4], strides=(2, 2), padding='same')
lrelu2 = lrelu(tf.layers.batch_normalization(conv2, training=isTrain), 0.2)
# 3rd hidden layer
conv3 = tf.layers.conv2d(lrelu2, 512, [4, 4], strides=(2, 2), padding='same')
lrelu3 = lrelu(tf.layers.batch_normalization(conv3, training=isTrain), 0.2)
# 4th hidden layer
conv4 = tf.layers.conv2d(lrelu3, 1024, [4, 4], strides=(2, 2), padding='same')
lrelu4 = lrelu(tf.layers.batch_normalization(conv4, training=isTrain), 0.2)
# output layer
conv5 = tf.layers.conv2d(lrelu4, 1, [4, 4], strides=(1, 1), padding='valid')
o = tf.nn.sigmoid(conv5)
return o, conv5
fixed_z_ = np.random.normal(0, 1, (25, 1, 1, 100))
def show_result(num_epoch, show = False, save = False, path = 'result.png'):
test_images = sess.run(G_z, {z: fixed_z_, isTrain: False})
size_figure_grid = 5
fig, ax = plt.subplots(size_figure_grid, size_figure_grid, figsize=(5, 5))
for i, j in itertools.product(range(size_figure_grid), range(size_figure_grid)):
ax[i, j].get_xaxis().set_visible(False)
ax[i, j].get_yaxis().set_visible(False)
for k in range(size_figure_grid*size_figure_grid):
i = k // size_figure_grid
j = k % size_figure_grid
ax[i, j].cla()
ax[i, j].imshow(np.reshape(test_images[k], (64, 64)), cmap='gray')
label = 'Epoch {0}'.format(num_epoch)
fig.text(0.5, 0.04, label, ha='center')
if save:
plt.savefig(path)
if show:
plt.show()
else:
plt.close()
def show_train_hist(hist, show = False, save = False, path = 'Train_hist.png'):
x = range(len(hist['D_losses']))
y1 = hist['D_losses']
y2 = hist['G_losses']
plt.plot(x, y1, label='D_loss')
plt.plot(x, y2, label='G_loss')
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.legend(loc=4)
plt.grid(True)
plt.tight_layout()
if save:
plt.savefig(path)
if show:
plt.show()
else:
plt.close()
# training parameters
batch_size = 100
lr = 0.0002
train_epoch = 20
# load MNIST
mnist = input_data.read_data_sets("MNIST_data/", one_hot=True, reshape=[])
# variables : input
x = tf.placeholder(tf.float32, shape=(None, 64, 64, 1))
z = tf.placeholder(tf.float32, shape=(None, 1, 1, 100))
isTrain = tf.placeholder(dtype=tf.bool)
# networks : generator
G_z = generator(z, isTrain)
# networks : discriminator
D_real, D_real_logits = discriminator(x, isTrain)
D_fake, D_fake_logits = discriminator(G_z, isTrain, reuse=True)
# loss for each network
D_loss_real = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=D_real_logits, labels=tf.ones([batch_size, 1, 1, 1])))
D_loss_fake = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=D_fake_logits, labels=tf.zeros([batch_size, 1, 1, 1])))
D_loss = D_loss_real + D_loss_fake
G_loss = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=D_fake_logits, labels=tf.ones([batch_size, 1, 1, 1])))
# trainable variables for each network
T_vars = tf.trainable_variables()
D_vars = [var for var in T_vars if var.name.startswith('discriminator')]
G_vars = [var for var in T_vars if var.name.startswith('generator')]
# optimizer for each network
with tf.control_dependencies(tf.get_collection(tf.GraphKeys.UPDATE_OPS)):
D_optim = tf.train.AdamOptimizer(lr, beta1=0.5).minimize(D_loss, var_list=D_vars)
G_optim = tf.train.AdamOptimizer(lr, beta1=0.5).minimize(G_loss, var_list=G_vars)
# open session and initialize all variables
sess = tf.InteractiveSession()
tf.global_variables_initializer().run()
# MNIST resize and normalization
train_set = tf.image.resize_images(mnist.train.images, [64, 64]).eval()
train_set = (train_set - 0.5) / 0.5 # normalization; range: -1 ~ 1
# results save folder
root = 'MNIST_DCGAN_results/'
model = 'MNIST_DCGAN_'
if not os.path.isdir(root):
os.mkdir(root)
if not os.path.isdir(root + 'Fixed_results'):
os.mkdir(root + 'Fixed_results')
train_hist = {}
train_hist['D_losses'] = []
train_hist['G_losses'] = []
train_hist['per_epoch_ptimes'] = []
train_hist['total_ptime'] = []
# training-loop
np.random.seed(int(time.time()))
print('training start!')
start_time = time.time()
for epoch in range(train_epoch):
G_losses = []
D_losses = []
epoch_start_time = time.time()
for iter in range(mnist.train.num_examples // batch_size):
# update discriminator
x_ = train_set[iter*batch_size:(iter+1)*batch_size]
z_ = np.random.normal(0, 1, (batch_size, 1, 1, 100))
loss_d_, _ = sess.run([D_loss, D_optim], {x: x_, z: z_, isTrain: True})
D_losses.append(loss_d_)
# update generator
z_ = np.random.normal(0, 1, (batch_size, 1, 1, 100))
loss_g_, _ = sess.run([G_loss, G_optim], {z: z_, x: x_, isTrain: True})
G_losses.append(loss_g_)
epoch_end_time = time.time()
per_epoch_ptime = epoch_end_time - epoch_start_time
print('[%d/%d] - ptime: %.2f loss_d: %.3f, loss_g: %.3f' % ((epoch + 1), train_epoch, per_epoch_ptime, np.mean(D_losses), np.mean(G_losses)))
fixed_p = root + 'Fixed_results/' + model + str(epoch + 1) + '.png'
show_result((epoch + 1), save=True, path=fixed_p)
train_hist['D_losses'].append(np.mean(D_losses))
train_hist['G_losses'].append(np.mean(G_losses))
train_hist['per_epoch_ptimes'].append(per_epoch_ptime)
end_time = time.time()
total_ptime = end_time - start_time
train_hist['total_ptime'].append(total_ptime)
print('Avg per epoch ptime: %.2f, total %d epochs ptime: %.2f' % (np.mean(train_hist['per_epoch_ptimes']), train_epoch, total_ptime))
print("Training finish!... save training results")
with open(root + model + 'train_hist.pkl', 'wb') as f:
pickle.dump(train_hist, f)
show_train_hist(train_hist, save=True, path=root + model + 'train_hist.png')
images = []
for e in range(train_epoch):
img_name = root + 'Fixed_results/' + model + str(e + 1) + '.png'
images.append(imageio.imread(img_name))
imageio.mimsave(root + model + 'generation_animation.gif', images, fps=5)
sess.close()
