作为一个工控领域偏应用的菜鸡程序员来说,平时程序开发过程中虽然没有涉及关于电机具体参数配置的开发,但是日常业务交流的过程中,不可避免有许多业务交流中会听到大佬们讲的黑话。下面来清扫一下电机相关知识的盲区。
1,什么是电机?
电机包括电动机和发电机 ,俗称马达,根据电磁感应定律实现电能转换或者传递的一种电磁装置。(详见百度)
我们常用来实现控制的是电动机。
2,电机的分类?
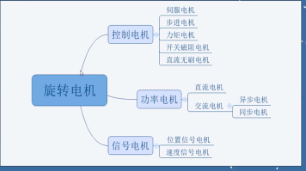
根据控制电机的方式可分为,伺服,步进,力矩,开关磁阻,直流无阻。
根据通过电机的电流,可以分为直流电机和交流电机。交流电机又可分为同步电机和异步电机。
根据给电机的信号是控制电机的速度还是位置可以分为,位置信号电机和速度信号电机。见下图:
3,直流电机中的常见术语?
3.1 空载转速:
电机正常通电无负载状态的转速(单位:rpm或转/分钟或r/min)
3.2空载电流:
电机正常通电无负载状态的电流(单位毫安mA)
3.3负载力矩:
电机负载测试时候的额定扭矩,仅用于测试参考(单位克每厘米或公斤每厘米)
3.4负载转速
电机在负载力矩下的转速(单位:rpm或转/分钟或r/min)
3.5负载电流:
电机在负载力矩下的电流(单位毫安或者安)
3.5堵转力矩:
又叫启动扭力,为电机所能承受的最大扭力标准,超过该扭力,电机将停转或者堵转(单位克每厘米或公斤每厘米)
3.6堵转电流:
也叫启动电流,为电机遇到堵转停止时候的最大电流(单位毫安或者安)
3.7减速比:
减速装置的传动比,由减速齿轮结构决定:减速电机输出轴转速与直流电机转速之比
3.8霍尔分辨率:
电机输出轴旋转一周霍尔编码器输出的脉冲数
4,电机控制如图示:

5,控制电机的H桥电路简析:

不同桥臂之间接通,对电机的控制也是不同的。控制电机的正反转 一定要加电机驱动的原因。
电机的对角线电桥导通,电机正转或者反转;
电机的半桥不能导通。
电机的桥臂完全断开,电机处于“惰性”状态。(不运动个也不阻碍运动 )
电机的上部分桥臂或者下部分桥臂单独闭合,电机处于“刹车”状态。(不运动但是会阻碍运动)
H桥电路的受限单极模式,单极模式,双极模式
受限单极模式:

单极模式:

双极模式:

极限单极:实现电机正转,电路中的q1输出pwm电压,q4打开,其余桥臂关闭。
反转同理(对称交换一下)。
单极:实现电机正转,电路中的q1输出pwm电压,利用高级定时器的定时器通道和互补通道,q2输出与q1相反对的pwm,
q4打开打开,其余桥臂关闭。
反转同理(对称交换一下)。
双极:Q1 ,Q4输出相同的pwm波,Q2,Q3输出相同的pwm波,而且与Q1互补。
假设Q1占空比为w,输出电压值的计算公式:V m= (w-(1-w))V=(2w-1)V;
电压正,正转,否则反转,占空比控制电压的正反转;
实际控制中应用比较多的是单极模式或者双极模式。双极模式比较稳定但是相对耗电。
以上是小白对电机的一些简单的总结,欢迎各位大佬指出不足之处。
