Task06——梯度下降
导数我们都非常熟悉,既可以表示某点的切线斜率,也可以表示某点变化率,公式如下表示:
f
′
(
x
)
=
lim
Δ
x
→
0
Δ
y
Δ
x
=
lim
Δ
x
→
0
f
(
x
+
Δ
x
)
−
f
(
x
)
Δ
x
f^{\prime}(x)=\lim _{\Delta x \rightarrow 0} \frac{\Delta y}{\Delta x}=\lim _{\Delta x \rightarrow 0} \frac{f(x+\Delta x)-f(x)}{\Delta x}
f ′ ( x ) = lim Δ x → 0 Δ x Δ y = lim Δ x → 0 Δ x f ( x + Δ x ) − f ( x )
f
x
(
x
,
y
)
f_{x}(x, y)
f x ( x , y )
y
y
y
f
(
x
,
y
)
f(x,y)
f ( x , y )
x
x
x
f
y
(
x
,
y
)
f_{y}(x, y)
f y ( x , y )
x
x
x
f
(
x
,
y
)
f(x,y)
f ( x , y )
y
y
y
x
x
x
y
y
y
f
(
x
,
y
)
f(x,y)
f ( x , y )
u
=
cos
θ
i
+
sin
θ
j
u=\cos \theta i+\sin \theta j
u = cos θ i + sin θ j
lim
t
→
0
f
(
x
+
t
cos
θ
,
y
+
t
sin
θ
)
−
f
(
x
)
t
\lim _{t \rightarrow 0} \frac{f(x+t \cos \theta, y+t \sin \theta)-f(x)}{t}
lim t → 0 t f ( x + t cos θ , y + t sin θ ) − f ( x )
D
u
f
D_{u}f
D u f
D
u
f
=
f
x
(
x
,
y
)
cos
θ
+
f
y
(
x
,
y
)
sin
θ
=
[
f
x
(
x
,
y
)
f
y
(
x
,
y
)
]
[
cos
θ
sin
θ
]
D_{u} f=f_{x}(x, y) \cos \theta+f_{y}(x, y) \sin \theta=\left[f_{x}(x, y) \quad f_{y}(x, y)\right]\left[\begin{array}{c}{\cos \theta} \\ {\sin \theta}\end{array}\right]
D u f = f x ( x , y ) cos θ + f y ( x , y ) sin θ = [ f x ( x , y ) f y ( x , y ) ] [ cos θ sin θ ]
D
u
f
=
A
×
I
=
∣
A
∣
∣
I
∣
cos
α
D_{u} f=\mathbf{A} \times \mathbf{I}=|\mathbf{A}||\mathbf{I}| \cos \alpha
D u f = A × I = ∣ A ∣ ∣ I ∣ cos α
α
\alpha
α
α
\alpha
α
D
u
f
D_{u}f
D u f
f
(
x
,
y
)
f(x,y)
f ( x , y )
(
x
0
,
y
0
)
(x_{0},y_{0})
( x 0 , y 0 )
[
∂
f
∂
x
0
∂
f
∂
y
0
]
\left[\begin{array}{c}{\frac{\partial f}{\partial x_{0}}} \\ {\frac{\partial f}{\partial y_{0}}}\end{array}\right]
[ ∂ x 0 ∂ f ∂ y 0 ∂ f ]
f
(
x
,
y
)
f(x,y)
f ( x , y ) 沿着梯度向量的方向,更加容易找到函数的最大值。反过来说,沿着梯度向量相反的方向(去负号),则就是更加容易找到函数的最小值。
在回归问题的第三步中,需要解决下面的最优化问题:
θ
∗
=
arg min
θ
L
(
θ
)
(1)
\theta^∗= \underset{ \theta }{\operatorname{arg\ min}} L(\theta) \tag1
θ ∗ = θ a r g m i n L ( θ ) ( 1 )
L
L
L
θ
\theta
θ
这里的parameters是复数,即
θ
\theta
θ
w
w
w
b
b
b
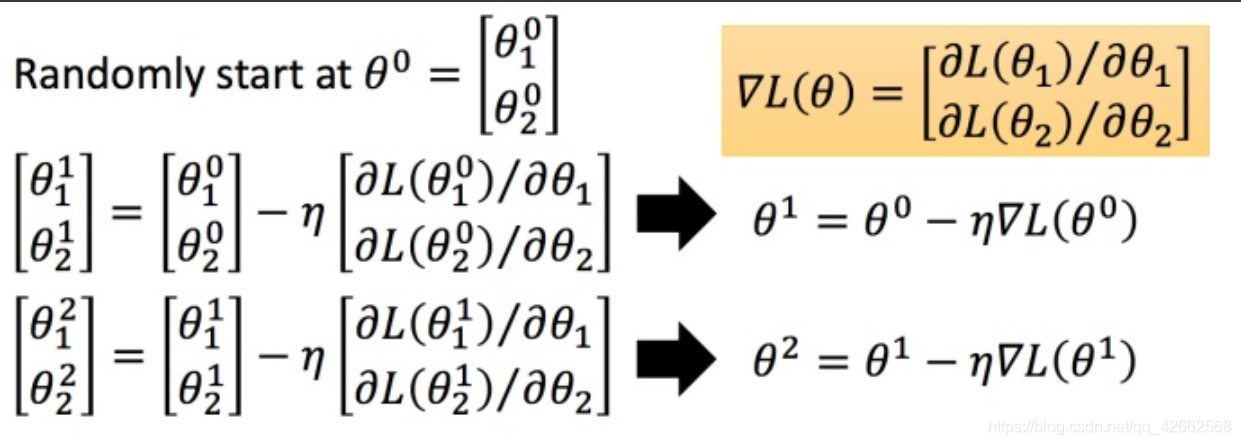
我们要找一组参数
θ
\theta
θ
假设
θ
\theta
θ
θ
1
,
θ
2
\theta_1, \theta_2
θ 1 , θ 2
θ
0
=
[
θ
1
0
θ
2
0
]
(2)
\theta^0 = \begin{bmatrix} \theta_1^0 \\ \theta_2^0 \end{bmatrix} \tag2
θ 0 = [ θ 1 0 θ 2 0 ] ( 2 )
这里可能某个平台不支持矩阵输入,看下图就好。
然后分别计算初始点处,两个参数对
L
L
L
θ
0
\theta^0
θ 0
η
\eta
η
▽
L
(
θ
)
\triangledown L(\theta)
▽ L ( θ )
η
\eta
η
上图举例将梯度下降法的计算过程进行可视化。
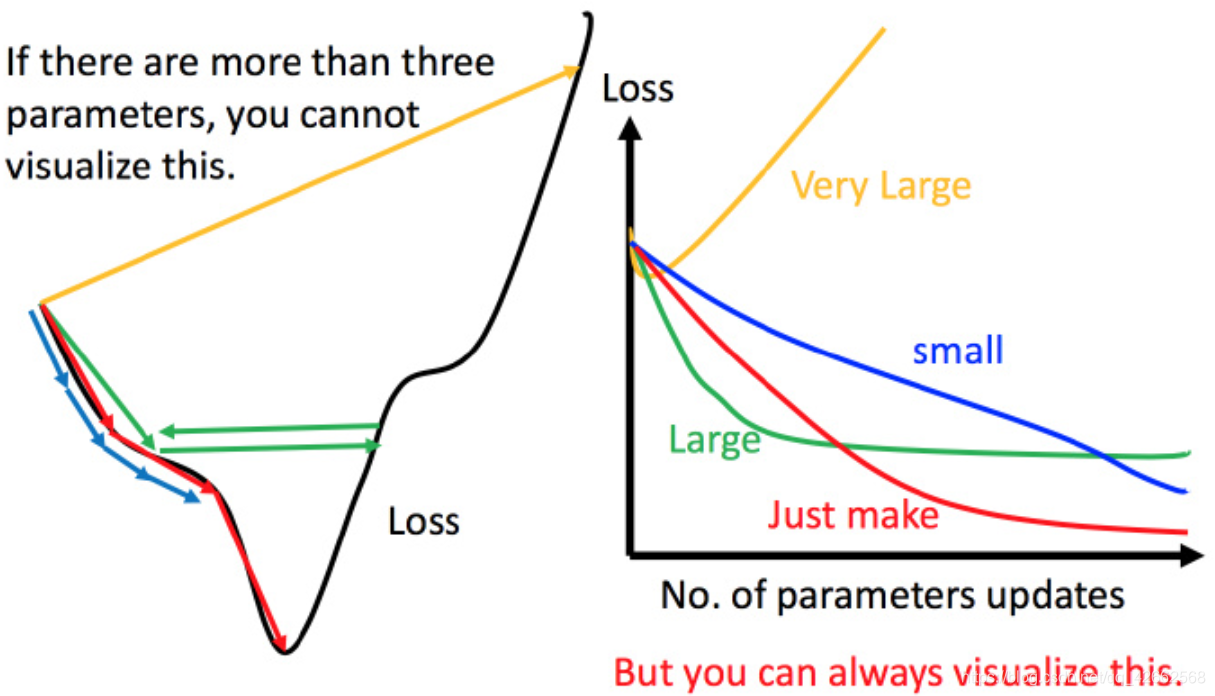
举例:
上图左边黑色为损失函数的曲线,假设从左边最高点开始,如果学习率调整的刚刚好,比如红色的线,就能顺利找到最低点。如果学习率调整的太小,比如蓝色的线,就会走的太慢,虽然这种情况给足够多的时间也可以找到最低点,实际情况可能会等不及出结果。如果 学习率调整的有点大,比如绿色的线,就会在上面震荡,走不下去,永远无法到达最低点。还有可能非常大,比如黄色的线,直接就飞出去了,更新参数的时候只会发现损失函数越更新越大。
虽然这样的可视化可以很直观观察,但可视化也只是能在参数是一维或者二维的时候进行,更高维的情况已经无法可视化了。
解决方法就是上图右边的方案,将参数改变对损失函数的影响进行可视化。比如学习率太小(蓝色的线),损失函数下降的非常慢;学习率太大(绿色的线),损失函数下降很快,但马上就卡住不下降了;学习率特别大(黄色的线),损失函数就飞出去了;红色的就是差不多刚好,可以得到一个好的结果。
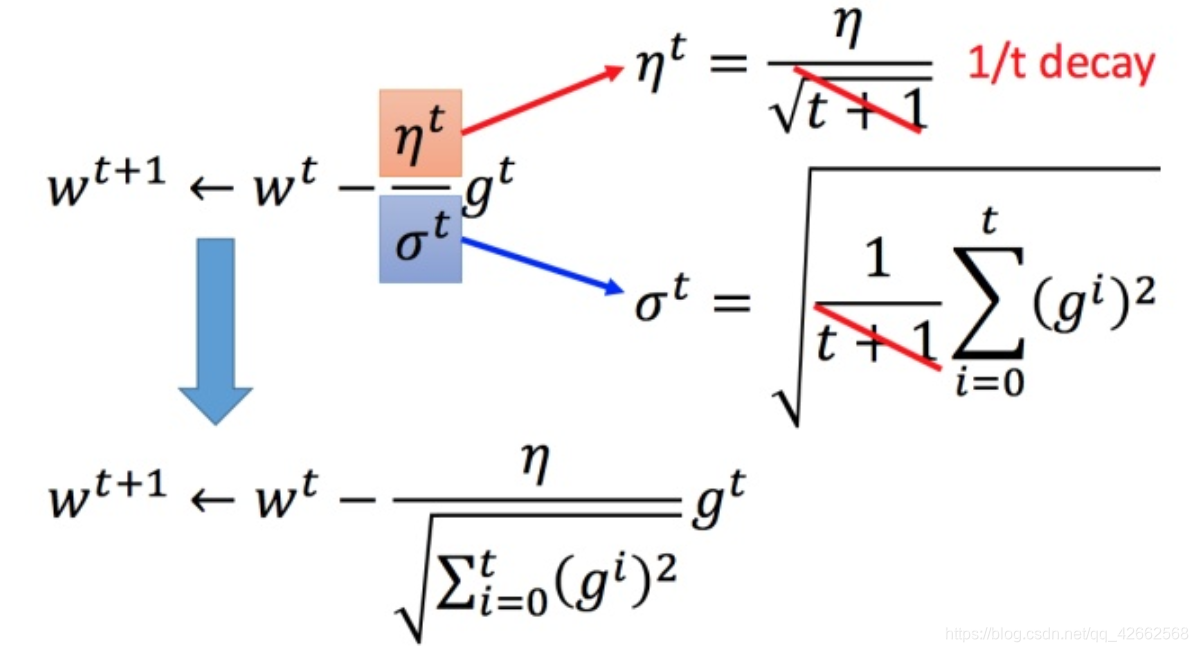
举一个简单的思想:随着次数的增加,通过一些因子来减少学习率
通常刚开始,初始点会距离最低点比较远,所以使用大一点的学习率
update好几次参数之后呢,比较靠近最低点了,此时减少学习率
比如
η
t
=
η
t
t
+
1
\eta^t =\frac{\eta^t}{\sqrt{t+1}}
η t = t + 1
η t
t
t
t
η
t
\eta^t
η t
学习率不能是一个值通用所有特征,不同的参数需要不同的学习率
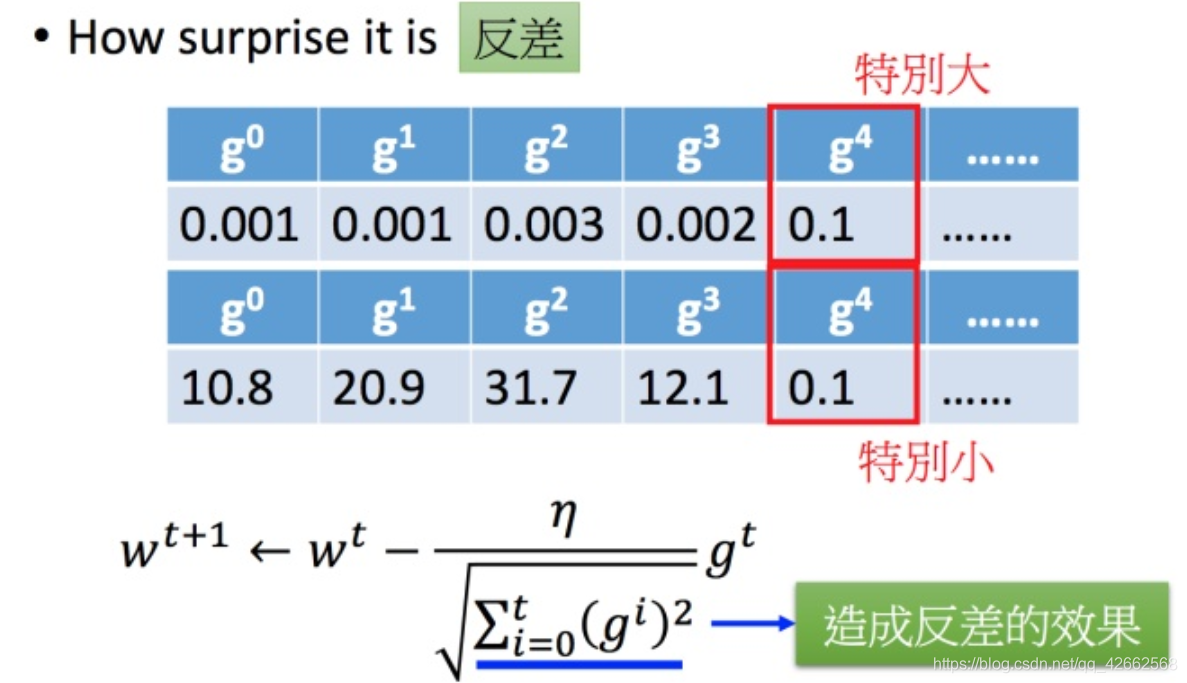
每个参数的学习率都把它除上之前微分的均方根。解释:
普通的梯度下降为:
w
t
+
1
←
w
t
−
η
t
g
t
(3)
w^{t+1} \leftarrow w^t -η^tg^t \tag3
w t + 1 ← w t − η t g t ( 3 )
η
t
=
η
t
t
+
1
(4)
\eta^t =\frac{\eta^t}{\sqrt{t+1}} \tag4
η t = t + 1
η t ( 4 )
Adagrad 可以做的更好:
w
t
+
1
←
w
t
−
η
t
σ
t
g
t
(5)
w^{t+1} \leftarrow w^t -\frac{η^t}{\sigma^t}g^t \tag5
w t + 1 ← w t − σ t η t g t ( 5 )
g
t
=
∂
L
(
θ
t
)
∂
w
(6)
g^t =\frac{\partial L(\theta^t)}{\partial w} \tag6
g t = ∂ w ∂ L ( θ t ) ( 6 )
σ
t
\sigma^t
σ t
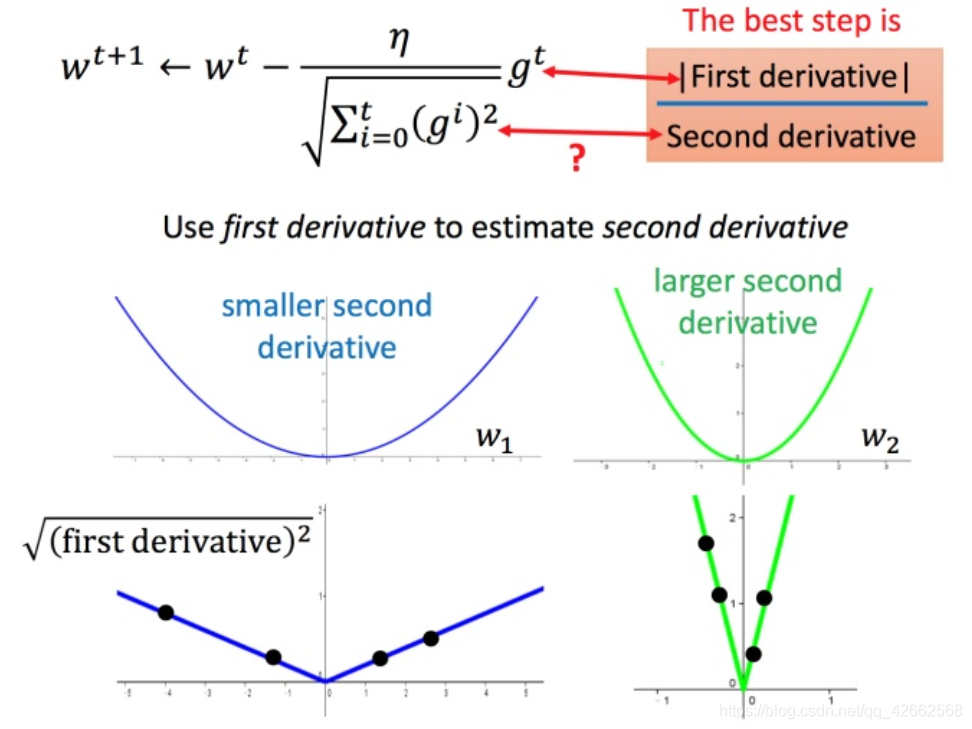
下图是一个参数的更新过程
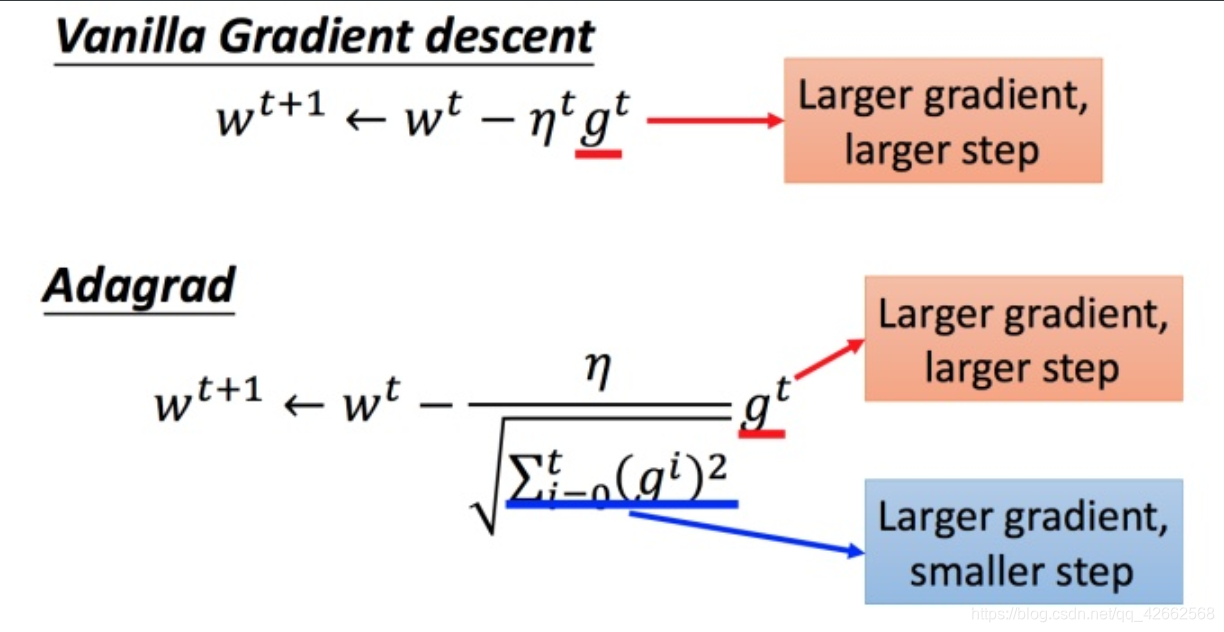
在 Adagrad 中,当梯度越大的时候,步伐应该越大,但下面分母又导致当梯度越大的时候,步伐会越小。
下图是一个直观的解释:
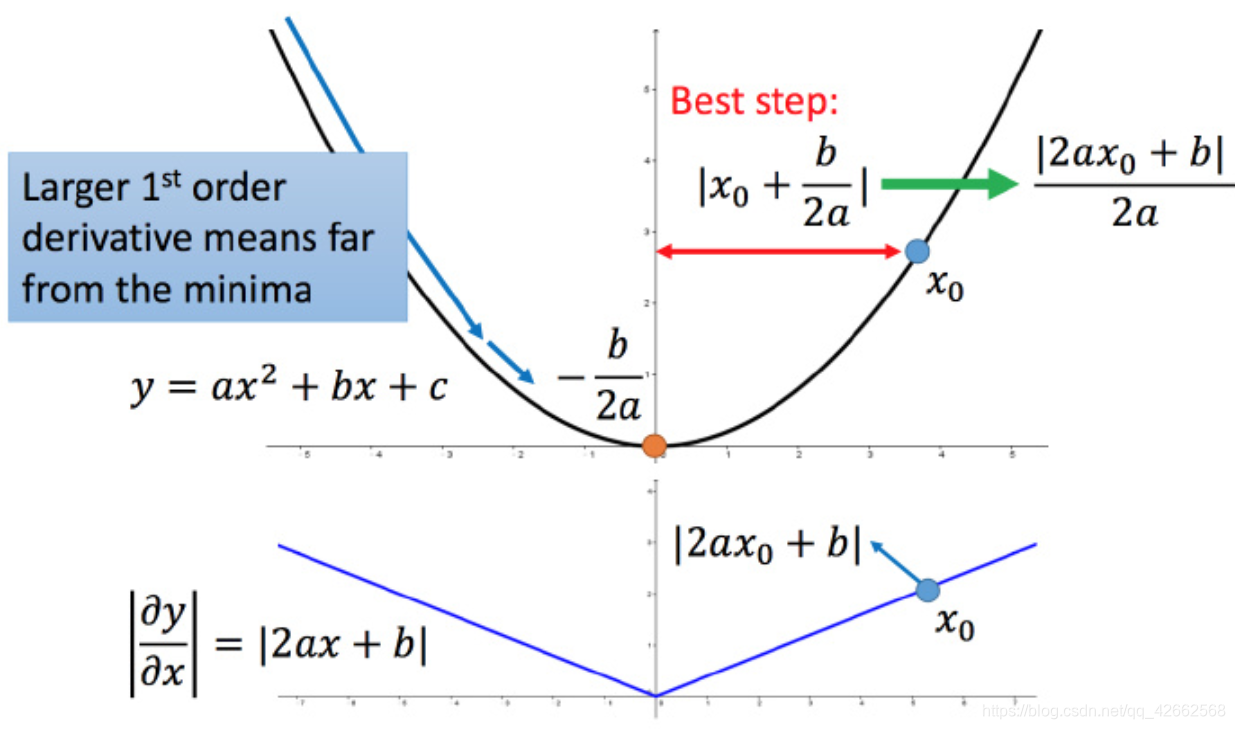
下面给一个正式的解释:
比如初始点在
x
0
x_0
x 0
−
b
2
a
−\frac{b}{2a}
− 2 a b
x
0
x0
x 0
∣
x
0
+
b
2
a
∣
\left | x_0+\frac{b}{2a} \right |
∣ ∣ x 0 + 2 a b ∣ ∣
∣
2
a
x
0
+
b
2
a
∣
\left | \frac{2ax_0+b}{2a} \right |
∣ ∣ 2 a 2 a x 0 + b ∣ ∣
∣
2
a
x
0
+
b
∣
|2ax_0+b|
∣ 2 a x 0 + b ∣
x
0
x_0
x 0
这样可以认为如果算出来的微分越大,则距离最低点越远。而且最好的步伐和微分的大小成正比。所以如果踏出去的步伐和微分成正比,它可能是比较好的。
结论1-1:梯度越大,就跟最低点的距离越远。
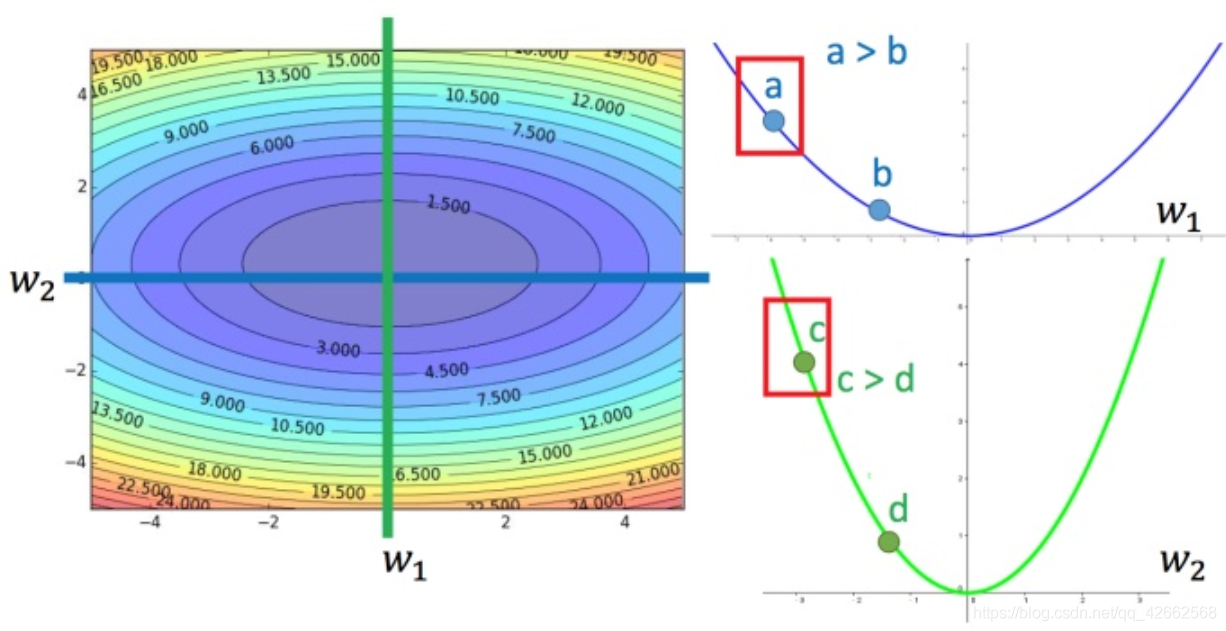
这个结论在多个参数的时候就不一定成立了。
对比不同的参数
上图左边是两个参数的损失函数,颜色代表损失函数的值。如果只考虑参数
w
1
w_1
w 1
w
2
w_2
w 2
a
a
a
b
b
b
c
c
c
b
b
b
a
a
a
c
c
c
c
c
c
a
a
a
c
c
c
所以结论1-1是在没有考虑跨参数对比的情况下,才能成立的。所以还不完善。
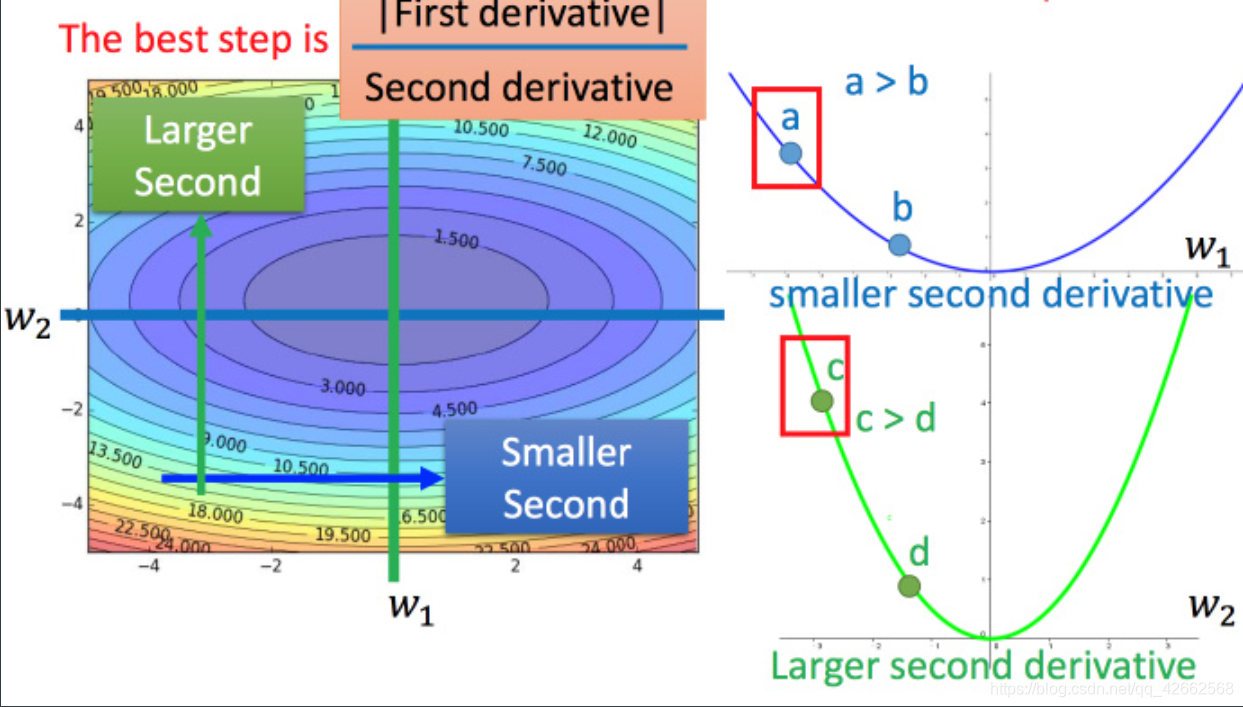
之前说到的最佳距离
∣
2
a
x
0
+
b
2
a
∣
\left | \frac{2ax_0+b}{2a} \right |
∣ ∣ 2 a 2 a x 0 + b ∣ ∣
2
a
2a
2 a
∂
2
y
∂
x
2
=
2
a
(7)
\frac{\partial ^2y}{\partial x^2} = 2a \tag7
∂ x 2 ∂ 2 y = 2 a ( 7 )
一
次
微
分
二
次
微
分
\frac{一次微分}{二次微分}
二 次 微 分 一 次 微 分
再回到之前的 Adagrad
对于
∑
i
=
0
t
(
g
i
)
2
\sqrt{\sum_{i=0}^t(g^i)^2}
∑ i = 0 t ( g i ) 2
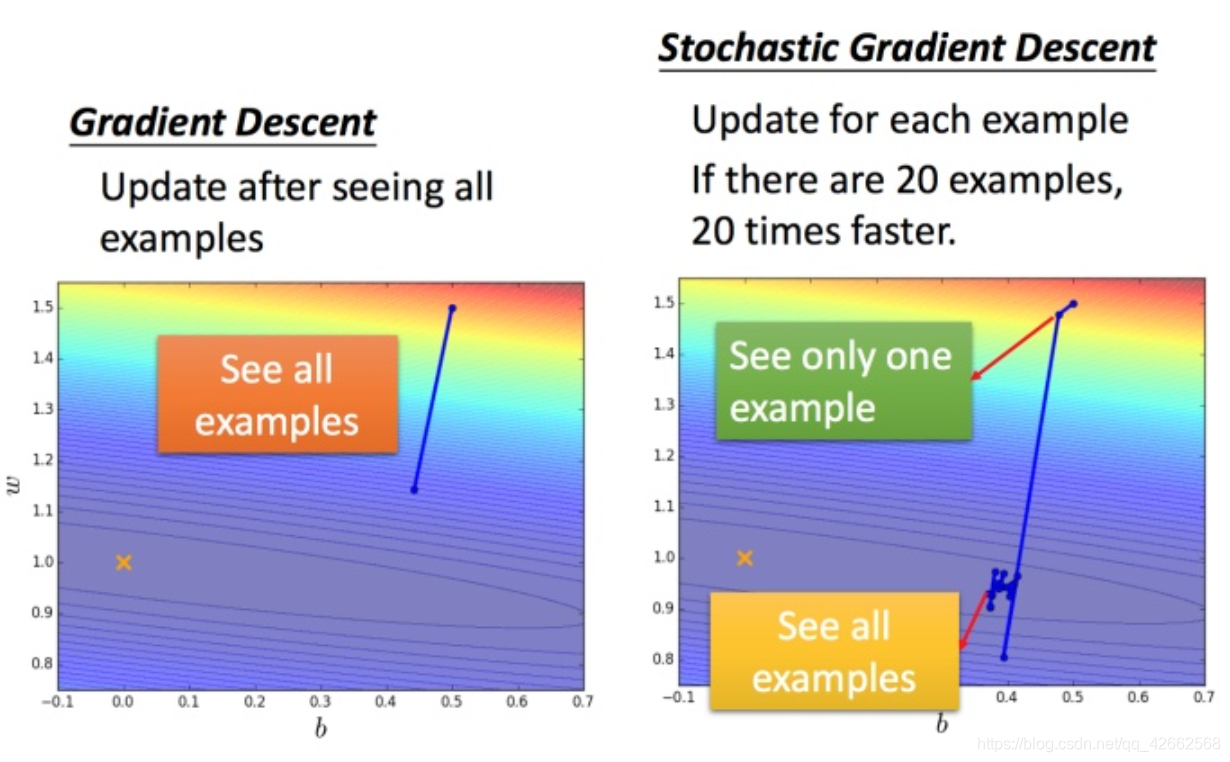
之前的梯度下降:
L
=
∑
n
(
y
^
n
−
(
b
+
∑
w
i
x
i
n
)
)
2
(8)
L=\sum_n(\hat y^n-(b+\sum w_ix_i^n))^2 \tag8
L = n ∑ ( y ^ n − ( b + ∑ w i x i n ) ) 2 ( 8 )
θ
i
=
θ
i
−
1
−
η
▽
L
(
θ
i
−
1
)
(9)
\theta^i =\theta^{i-1}- \eta\triangledown L(\theta^{i-1}) \tag9
θ i = θ i − 1 − η ▽ L ( θ i − 1 ) ( 9 )
而随机梯度下降法更快:
损失函数不需要处理训练集所有的数据,选取一个例子
x
n
x^n
x n
L
=
(
y
^
n
−
(
b
+
∑
w
i
x
i
n
)
)
2
(10)
L=(\hat y^n-(b+\sum w_ix_i^n))^2 \tag{10}
L = ( y ^ n − ( b + ∑ w i x i n ) ) 2 ( 1 0 )
θ
i
=
θ
i
−
1
−
η
▽
L
n
(
θ
i
−
1
)
(11)
\theta^i =\theta^{i-1}- \eta\triangledown L^n(\theta^{i-1}) \tag{11}
θ i = θ i − 1 − η ▽ L n ( θ i − 1 ) ( 1 1 )
此时不需要像之前那样对所有的数据进行处理,只需要计算某一个例子的损失函数Ln,就可以赶紧update 梯度。
对比:
常规梯度下降法走一步要处理到所有二十个例子,但随机算法此时已经走了二十步(每处理一个例子就更新)
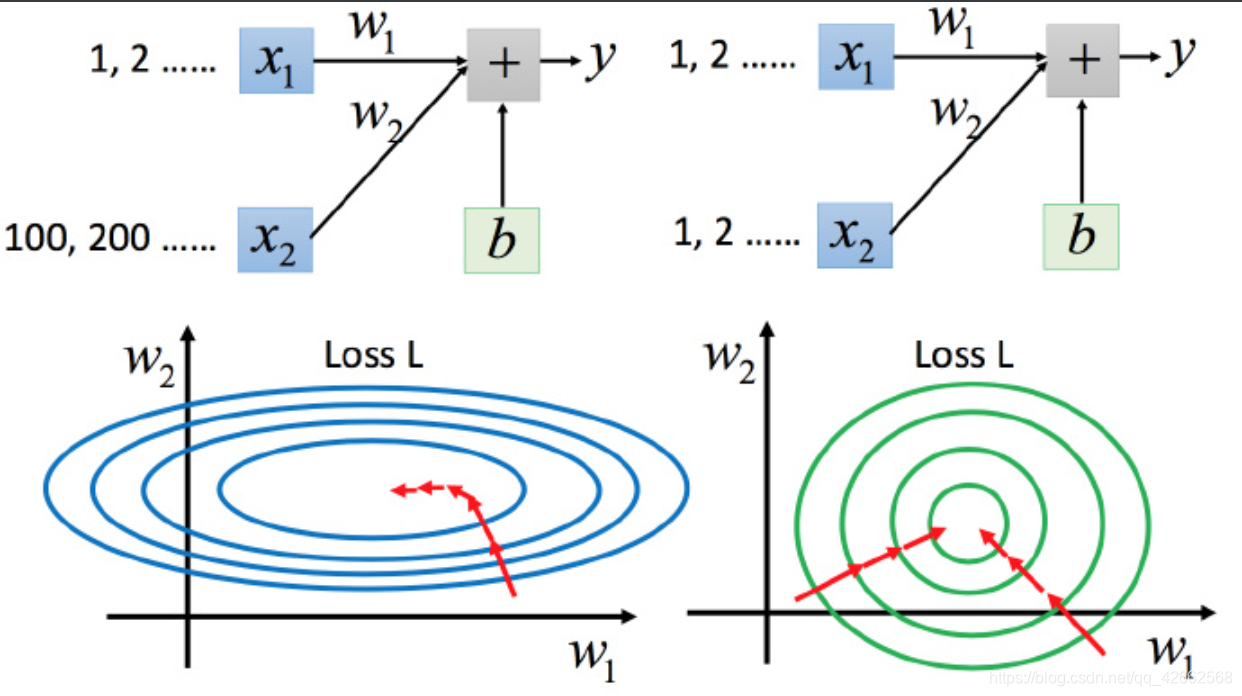
比如有个函数:
y
=
b
+
w
1
x
1
+
w
2
x
2
(12)
y=b+w_1x_1+w_2x_2 \tag{12}
y = b + w 1 x 1 + w 2 x 2 ( 1 2 )
上图左边是
x
1
x_1
x 1
x
2
x_2
x 2
w
1
w_1
w 1
w
2
w_2
w 2
w
1
w_1
w 1
y
y
y
x
2
x_2
x 2
y
y
y
坐标系中是两个参数的error surface(现在考虑左边蓝色),因为
w
1
w_1
w 1
y
y
y
w
1
w_1
w 1
w
1
w_1
w 1
w
1
w_1
w 1
x
2
x_2
x 2
y
y
y
x
2
x_2
x 2
x
2
x_2
x 2
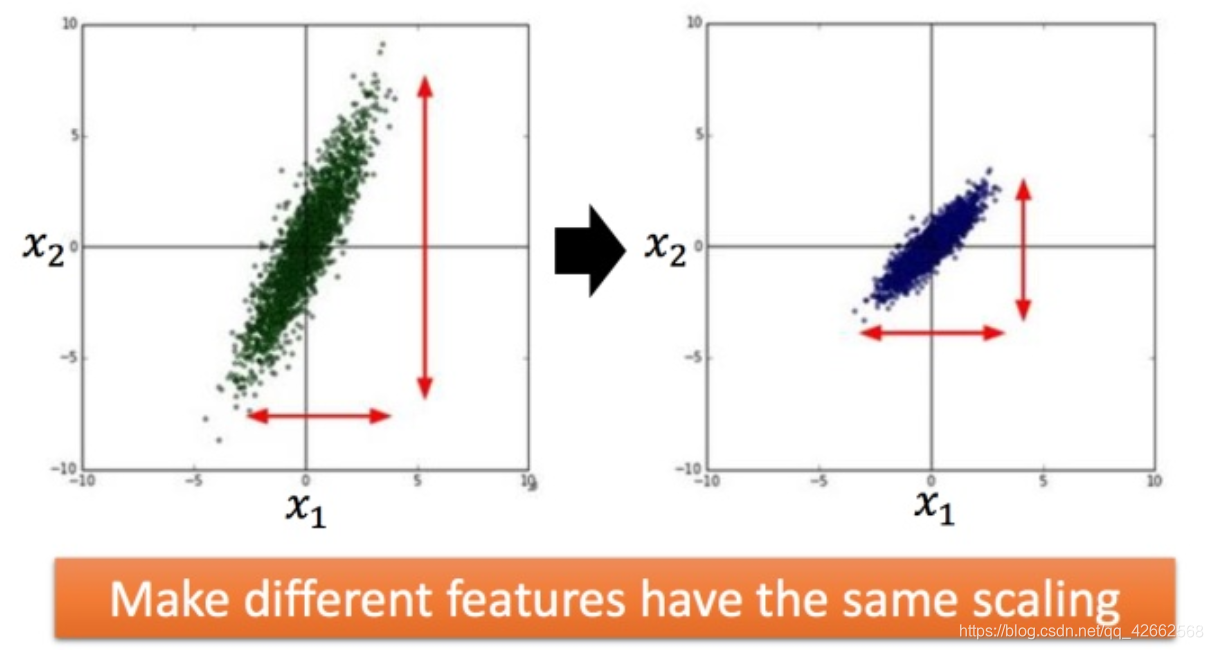
上图右边是两个参数scaling比较接近,右边的绿色图就比较接近圆形。
对于左边的情况,上面讲过这种狭长的情形不过不用Adagrad的话是比较难处理的,两个方向上需要不同的学习率,同一组学习率会搞不定它。而右边情形更新参数就会变得比较容易。左边的梯度下降并不是向着最低点方向走的,而是顺着等高线切线法线方向走的。但绿色就可以向着圆心(最低点)走,这样做参数更新也是比较有效率。
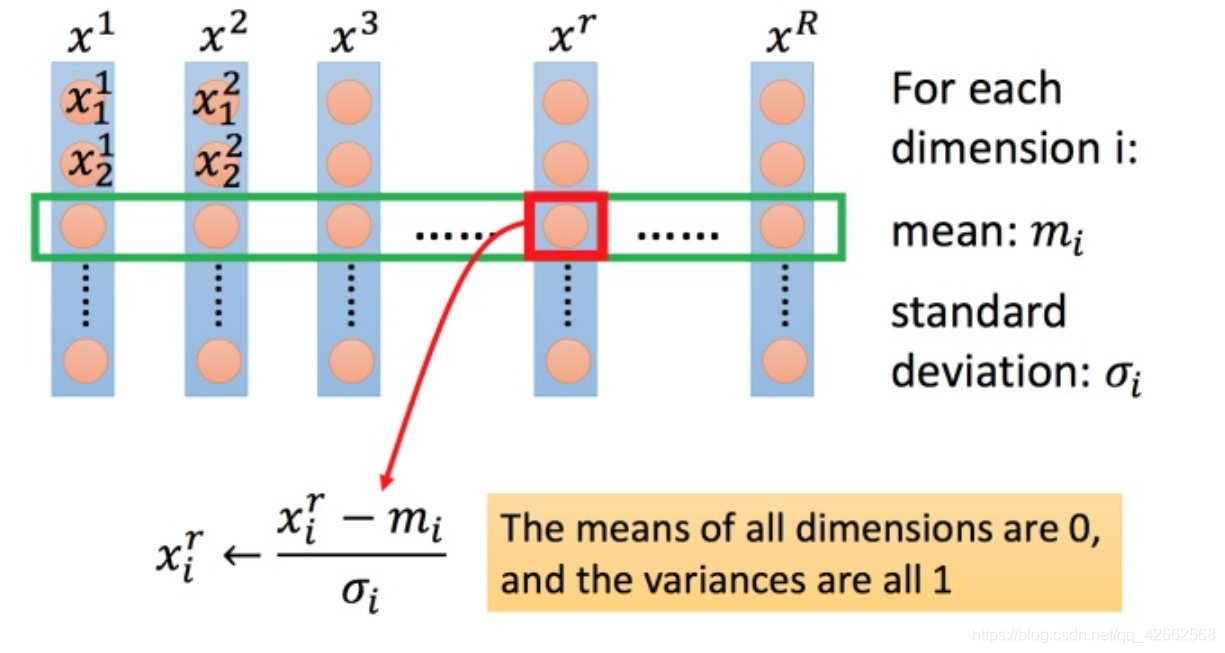
方法非常多,这里举例一种常见的做法:
上图每一列都是一个例子,里面都有一组特征。
对每一个维度
i
i
i
m
i
m_i
m i
σ
i
\sigma _i
σ i
然后用第
r
r
r
i
i
i
m
i
m_i
m i
σ
i
\sigma _i
σ i
0
0
0
1
1
1
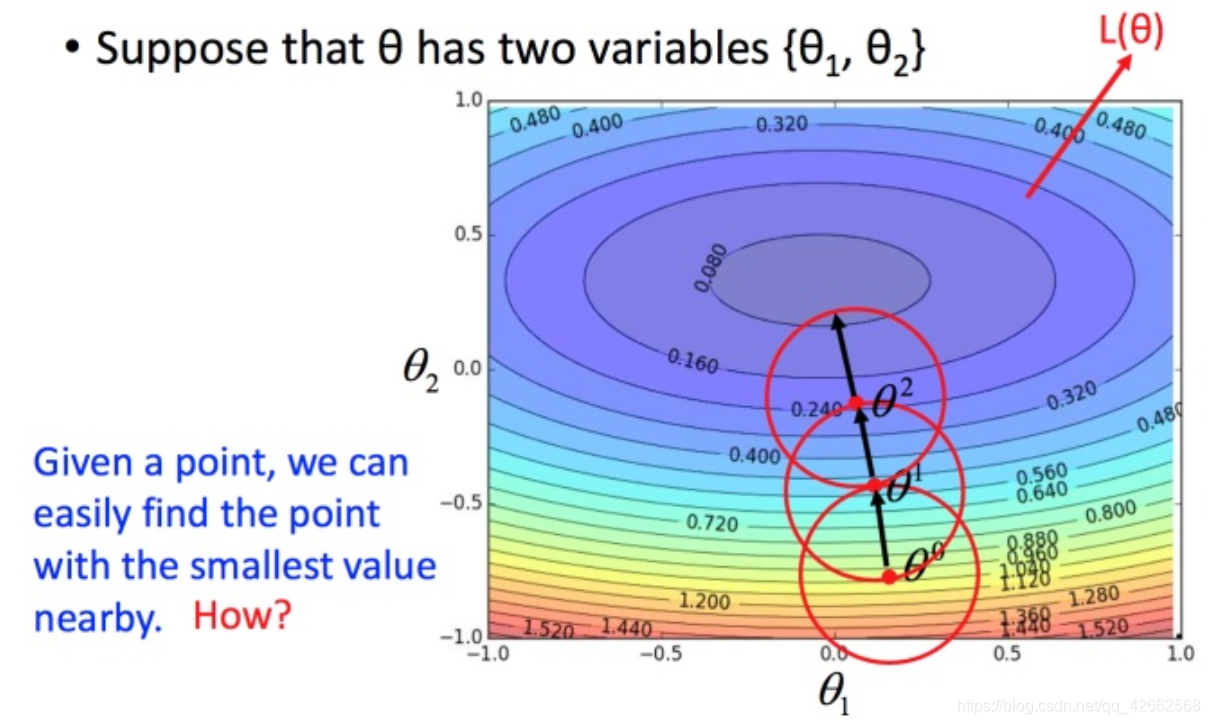
当用梯度下降解决问题:
θ
∗
=
arg max
θ
L
(
θ
)
(1)
\theta^∗= \underset{ \theta }{\operatorname{arg\ max}} L(\theta) \tag1
θ ∗ = θ a r g m a x L ( θ ) ( 1 )
每次更新参数
θ
\theta
θ
θ
\theta
θ
L
(
θ
0
)
>
L
(
θ
1
)
>
L
(
θ
2
)
>
⋅
⋅
⋅
(13)
L(\theta^0) >L(\theta^1)>L(\theta^2)>···\tag{13}
L ( θ 0 ) > L ( θ 1 ) > L ( θ 2 ) > ⋅ ⋅ ⋅ ( 1 3 )
上述结论正确吗?
结论是不正确的。。。
比如在
θ
0
\theta^0
θ 0
θ
1
\theta^1
θ 1
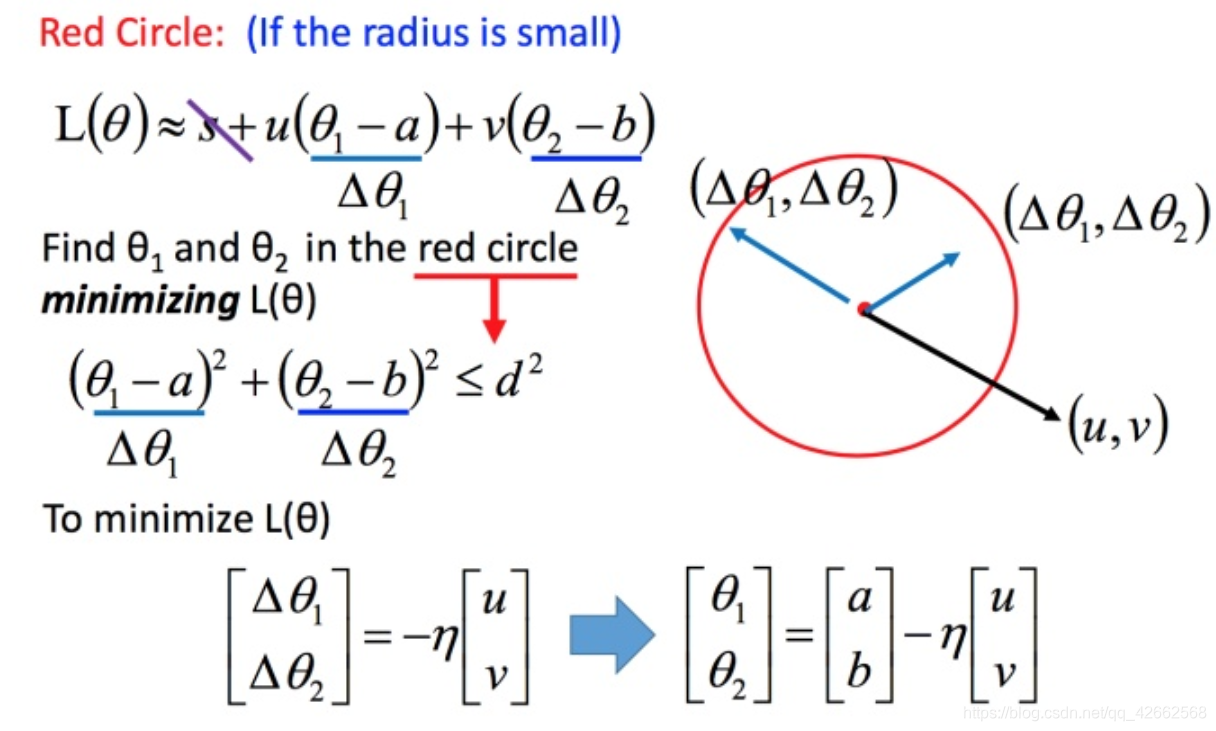
接下来就是如果在小圆圈内快速的找到最小值?
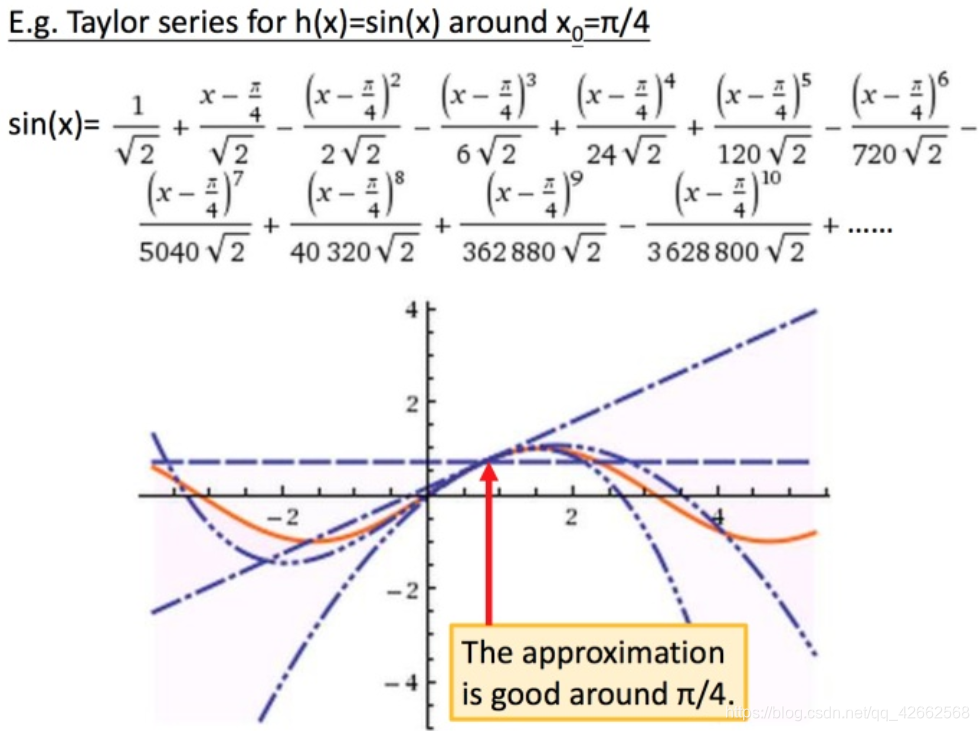
先介绍一下泰勒展开式
若
h
(
x
)
h(x)
h ( x )
x
=
x
0
x=x_0
x = x 0
h
(
x
)
=
∑
k
=
0
∞
h
k
(
x
0
)
k
!
(
x
−
x
0
)
k
=
h
(
x
0
)
+
h
′
(
x
0
)
(
x
−
x
0
)
+
h
′
′
(
x
0
)
2
!
(
x
−
x
0
)
2
+
⋯
(14)
\begin{aligned} h(x) &= \sum_{k=0}^{\infty }\frac{h^k(x_0)}{k!}(x-x_0)^k \\ & =h(x_0)+{h}'(x_0)(x−x_0)+\frac{h''(x_0)}{2!}(x−x_0)^2+⋯ \tag{14} \end{aligned}
h ( x ) = k = 0 ∑ ∞ k ! h k ( x 0 ) ( x − x 0 ) k = h ( x 0 ) + h ′ ( x 0 ) ( x − x 0 ) + 2 ! h ′ ′ ( x 0 ) ( x − x 0 ) 2 + ⋯ ( 1 4 )
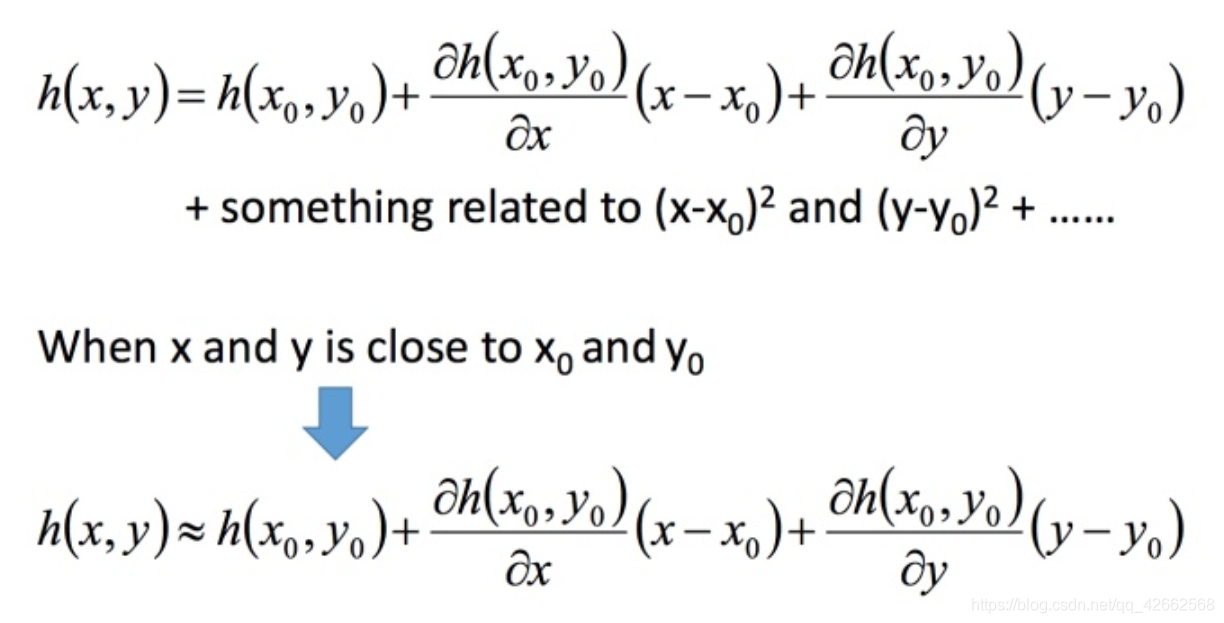
当
x
x
x
x
0
x_0
x 0
h
(
x
)
≈
h
(
x
0
)
+
h
′
(
x
0
)
(
x
−
x
0
)
h(x)≈h(x_0)+{h}'(x_0)(x−x_0)
h ( x ) ≈ h ( x 0 ) + h ′ ( x 0 ) ( x − x 0 )
h
(
x
)
h(x)
h ( x )
x
=
x
0
x=x_0
x = x 0
x
x
x
举例:
图中3条蓝色线是把前3项作图,橙色线是
s
i
n
(
x
)
sin(x)
s i n ( x )
下面是两个变量的泰勒展开式
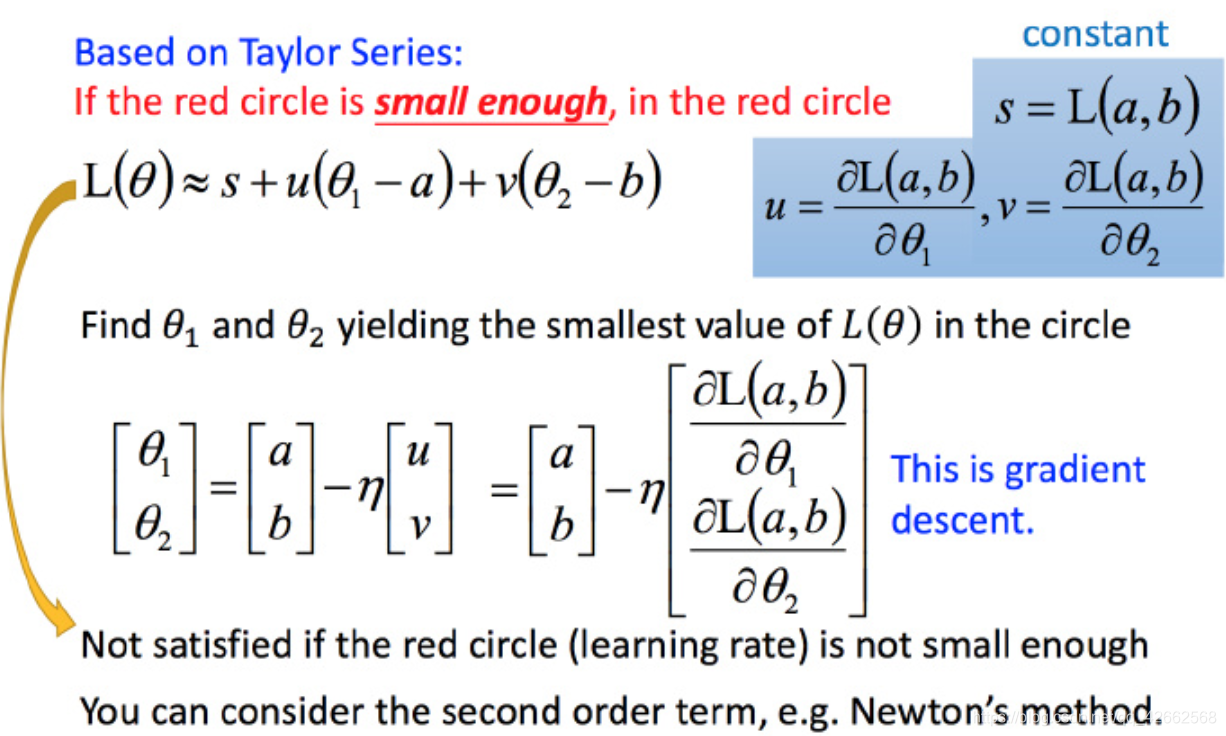
回到之前如何快速在圆圈内找到最小值。基于泰勒展开式,在
(
a
,
b
)
(a,b)
( a , b )
将问题进而简化为下图:
(
△
θ
1
,
△
θ
2
)
(\triangle \theta_1,\triangle \theta_2)
( △ θ 1 , △ θ 2 )
(
u
,
v
)
(u,v)
( u , v )
(
u
,
v
)
(u,v)
( u , v )
然后将u和v带入。
L
(
θ
)
≈
s
+
u
(
θ
1
−
a
)
+
v
(
θ
2
−
b
)
(14)
L(\theta)\approx s+u(\theta_1 - a)+v(\theta_2 - b) \tag{14}
L ( θ ) ≈ s + u ( θ 1 − a ) + v ( θ 2 − b ) ( 1 4 )
发现最后的式子就是梯度下降的式子。但这里用这种方法找到这个式子有个前提,泰勒展开式给的损失函数的估算值是要足够精确的,而这需要红色的圈圈足够小(也就是学习率足够小)来保证。所以理论上每次更新参数都想要损失函数减小的话,即保证式1-2 成立的话,就需要学习率足够足够小才可以。
所以实际中,当更新参数的时候,如果学习率没有设好,是有可能式1-2是不成立的,所以导致做梯度下降的时候,损失函数没有越来越小。
式1-2只考虑了泰勒展开式的一次项,如果考虑到二次项(比如牛顿法),在实际中不是特别好,会涉及到二次微分等,多很多的运算,性价比不好。
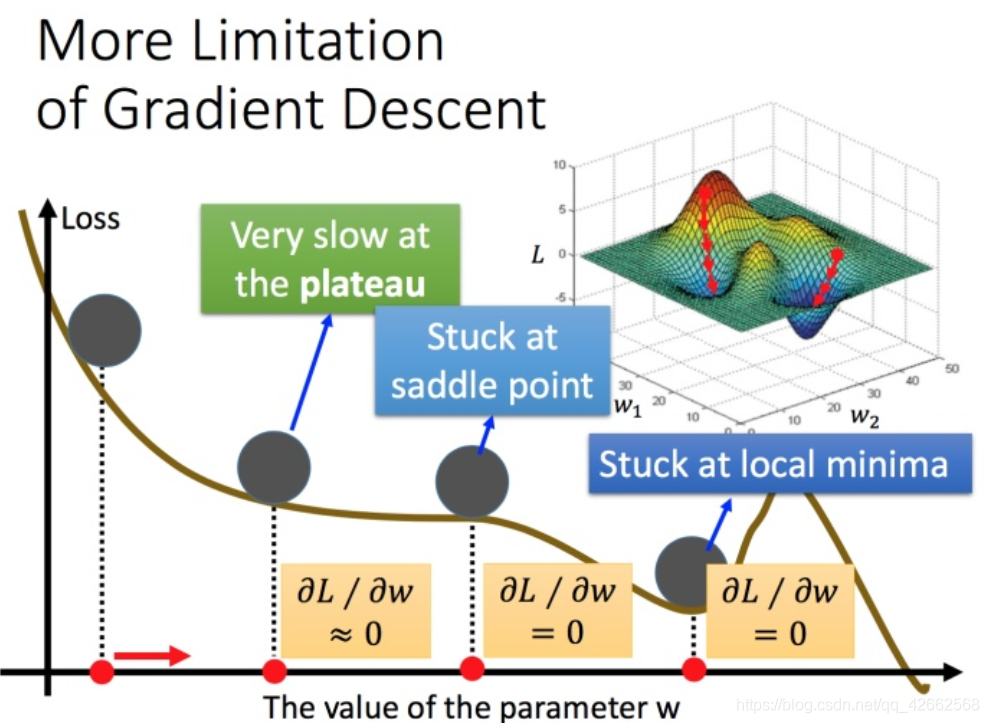
容易陷入局部极值
一般来说,牛顿法主要应用在两个方面,1:求方程的根;2:最优化。
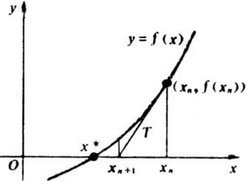
牛顿法:
f
(
x
)
f(x)
f ( x )
g
(
x
)
=
∇
f
(
x
)
g(x)=\nabla f(x)
g ( x ) = ∇ f ( x )
H
(
x
)
H(x)
H ( x )
ε
\varepsilon
ε
f
(
x
)
f(x)
f ( x )
x
∗
x^{*}
x ∗
取初始点
x
(
0
)
x^{(0)}
x ( 0 )
k
=
0
k=0
k = 0
g
k
=
g
(
x
(
k
)
)
g_{k}=g\left(x^{(k)}\right)
g k = g ( x ( k ) )
∥
g
k
∥
<
ε
\left\|g_{k}\right\|<\varepsilon
∥ g k ∥ < ε
x
∗
=
x
(
k
)
x^{*}=x^{(k)}
x ∗ = x ( k )
H
k
=
H
(
x
(
k
)
)
H_{k}=H\left(x^{(k)}\right)
H k = H ( x ( k ) )
p
k
p_{k}
p k
H
k
p
k
=
−
g
k
H_{k} p_{k}=-g_{k}
H k p k = − g k
x
(
k
+
1
)
=
x
(
k
)
+
p
k
x^{(k+1)}=x^{(k)}+p_{k}
x ( k + 1 ) = x ( k ) + p k
k
=
k
+
1
k=k+1
k = k + 1
[1] https://zhuanlan.zhihu.com/p/37524275 .https://www.leiphone.com/news/201907/DLDxLHJodhuT9h2X.html .李宏毅机器学习2019