RobotStudio如何对异型工具建立多个TCP点
1、本文基于ABB的RobotStudio软件,针对异型固定工具如何建立多个TCP点问题,例如夹具上装有多个抓夹,亦或打磨工具上有多个打磨头,抓取工具上多个洗盘的TCP点建立解决方法(PS:笔者也是遇到问题,百度谷歌无果后,无意间摸索出来的,若有更好的办法还请不吝告知!)
2、系统:win10
软件:RobotStudio v6.08
3、本人水平有限,如所述有不妥之处,还望大家指出,一起交流。
2019.8.19
————————————————
版权声明:本文为CSDN博主「痛惜4」的原创文章,遵循CC 4.0 by-sa版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/Square_KG/article/details/98053620
案例简介
本案例需要一个打磨+清洁的工具,设计之初为了便捷便将两种功能整合在一起,如图所示,a处为清洁滚轴,b处为电极打磨头,c处为气动打磨头(PS:图片中没有显示出电极打磨头和气动打磨头,因为两者实际上都是装载在棕黄的圆盘上的,笔者不知道怎么通过选择不同的TCP点显示对应的工具,而实际需求只要建立好TCP点,通过不同的TCP点建立不同的轨迹,是能够实现机器人想要走的动作的,因此忽略了显示问题)。

创建步骤
第一步:建立框架
建立框架的步骤,例如导入,功能键介绍之类,已有很多资料的详解,在此笔者不在赘述,只提几个关键点:
1、如何在圆柱体的曲面上建立框架。
如图a处所示,笔者采用的方法是,俯视角度,利用 面选择 和 取中点 工具,选中第一个点,其他点手动输入,然后点击创建。

 啰嗦一句,这里笔者是有做工具姿态调节处理的,先将这个圆柱体截面平行与大地坐标系的XY轴,所以可以手动输入,若圆柱体截面与大地XY轴不平行,那么手动输入的值建出来的框架同样不能平行大地坐标XY轴。
啰嗦一句,这里笔者是有做工具姿态调节处理的,先将这个圆柱体截面平行与大地坐标系的XY轴,所以可以手动输入,若圆柱体截面与大地XY轴不平行,那么手动输入的值建出来的框架同样不能平行大地坐标XY轴。
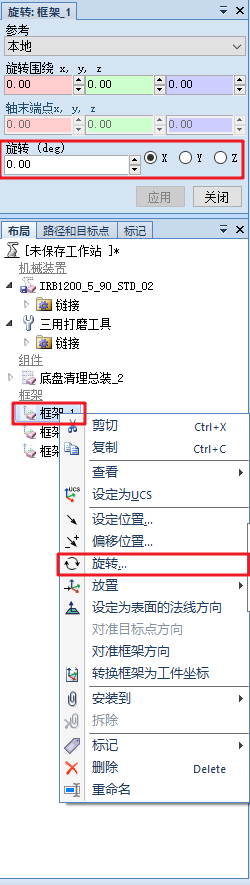
2、创建出来的框架如何调整XYZ轴
右键创建出来的框架_1,选择旋转,选择绕X,Y,Z轴旋转调节角度。
第二步创建工具
在“建模”菜单栏下选择建立工具 然后在弹出的页面上填写“工具名称”再选择“使用已有的部件”选择工具模型,直接点击下一步。


填写TCP名称,选择与之对应的TCP点,然后按下导入按钮(图标3),然后继续输入TCP名称(必须英文),选择对应TCP按钮,如此笔者将自己建立的三个TCP都导入如图所示,点击完成即创建工具成功!

