自抗扰控制在直流DCDC变换器的应用
第一,有其他论文的截图(别人的写很清楚,比我写的好)
第二,完全的萌新,可以先从第三章节看起,里面解释了sign函数和fal函数的组成和原理和特性说明
1. 自抗扰控制的组成
 自抗扰控制器由非线性跟踪微分器 (TD)、扩张状态观测器 (ESO) 和非线性误差反馈控制律
自抗扰控制器由非线性跟踪微分器 (TD)、扩张状态观测器 (ESO) 和非线性误差反馈控制律
(NLSEF) 三部分组成,其结构图如图 1 所示。
2. 各个组成的名称与作用
2.1 非线性跟踪微分器 (TD)
所谓的跟踪微分器是这样的一个机构:对它输入信号 ν(t),它将输出两个信号z1和z2 ,z1本质上是对控制设定量的跟踪。z2是设定量的导数。
TD的作用在于已知目标函数时,可以给出对目标函数值和导数的良好估计(其中 z1渐进稳定于目标 v(t)原变量在图一中 , z2渐近稳定于 v(t)的导数,),对过渡过程做出了安排,同时也给出了微分的获得方法,缓解了普通微分器抑制噪声和提高精度之间的矛盾,同时减小超调,提升了控制系统的鲁棒性。
以下截图来自论文 自抗扰控制的原理解析
自抗扰控制的原理解析——马幼捷(百度文库链接,清晰度比CNKI的好)


2.2 扩张状态观测器 (ESO)

个人认为是整个算法的核心部分。
ADRC是一种单输入单输出的控制,因此只能适用于非耦合的情况。所以对我们飞控的角速度内环这种强耦合的情况,只能将耦合项看成一种扰动来用 [公式] 做补偿。
其它的情况下则是对控制过程中真实存在的扰动进行补偿,达到抗干扰,鲁棒性好,对模型依赖性降低的效果,所谓扩张,则是将扰动项视为新的状态变量,所以是对状态向量的一种扩张。
对于以下二阶系统:
![[公式]](https://img-blog.csdnimg.cn/2020031818315464.png)
我们将耦合项 [公式] 看作扰动,将其扩张为新的状态变量 [公式] ,故有如下式子:
![[公式]](https://img-blog.csdnimg.cn/20200318183204648.png)
根据韩先生论文,对这样的系统, eso的形式如下:
![[公式]](https://img-blog.csdnimg.cn/20200318183222130.png)
其中未知参数和本文上面所提一致,在我看到的论文中,有建议称如下参数取值效果较好 ![[公式]](https://img-blog.csdnimg.cn/20200318183234423.png) 。
。
2.3 非线性误差反馈控制律(NLSEF)

3 自抗扰入门的基础知识补充
3.1sign函数
sign(x)或者Sign(x)叫做符号函数,在数学和计算机运算中,其功能是取某个数的符号(正或负):
当x>0,sign(x)=1;
当x=0,sign(x)=0;
当x<0, sign(x)=-1;
在通信中,sign(t)表示这样一种信号:
当t≥0,sign(t)=1; 即从t=0时刻开始,信号的幅度均为1;
当t<0, sign(t)=-1;在t=0时刻之前,信号幅度均为-1
3.2 fal函数 (这玩意很重点)
参考论文网络连接索引
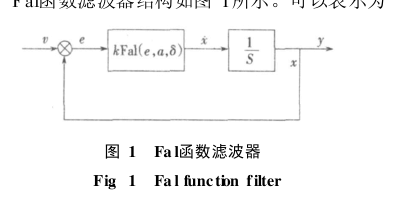
自抗扰控制器 (autodisturbancerejec-tioncontrol, ADRC)的核心是扩张状态观测器 (extendedstateobserver, ESO), 通过把系统中的内外扰动扩张成新的一阶状态, 再利用配置特殊的非线性结构 ——— Fal函数 ,然后适当地选择观测器参数, 就可以得到系统所有状态的观测值 , 其中也包括对系统中所含内扰和外扰的估计。
所以 Fal函数是 ADRC的核心单元 。Fal函数实际上是对控制工程界的一个经验知识 :“大误差 ,小增益 ;小误差 , 大增益 ”的数学拟合。模糊控制,智能控制 ,变增益 PID等方法, 本质上都是基于这种经验知识,。




3.3 fal的工作原理说明(超重点)

4.自抗扰控制simulink仿真运行
4.1 ADRC 自抗扰控制器的本身搭建
simulink的本体模型是抄的另外一位大佬的,网址在下面
ADRC控制算法仿真(基于MATALB和Simulink)

不过他的ESO的两个FAL的参数改为0.25 和0.6更加适合一般情况,过滤因子的大小。
4.2 双向DC/DC变换器 电感电流控制器基于ADRC(自抗扰控制)的simulink仿真
直接上截图吧
在第五淼时,逆变器断开,直流母线电压跌落,直流母线电压设定值为50V 波动范围2V。

