前言
凸包(Convex Hull)是一个计算几何(图形学)中的概念,在一个实数向量空间V中,对于给定集合X,所有包含X的凸集的交集S被称为X的凸包。通俗的讲就是把检测到一个平面的点以最大的外包多边形包进去。
凸包检测
1.C++ API 原型
void convexHull(InputArray points, OutputArray hull, bool clockwise=false, bool returnPoints=true )
InputArray points: 输入二维点集,利用Mat或者vector存储
OutputArray hull: 输出的convex hull点集。有两种情况:直接点集合或者points的索引
bool false: 负责顺时针或者逆时针
bool returnPoints: 控制传回的是点集,还是点集的索引
2.代码演示
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
#include <opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
void convexHullDetection(cv::Mat &src, cv::Mat &dst);
int main(int argc, char** argv)
{
Mat src, dst;
src = imread("bin.jpg");
if (!src.data)
{
std::cout << "could not load image..." << std::endl;
return -1;
}
dst = src.clone();
convexHullDetection(src, dst);
cv::namedWindow("dst", 0);
cv::imshow("dst", dst);
waitKey(0);
return 0;
}
void convexHullDetection(cv::Mat &src, cv::Mat &dst)
{
vector<vector<Point>> contours;
vector<Vec4i> hierachy;
cv::Mat src_gray, bin_output;
if (src.channels() > 1)
{
cvtColor(src, src_gray, COLOR_BGR2GRAY);
}
threshold(src_gray, bin_output, 127, 255, THRESH_BINARY);
findContours(bin_output, contours, hierachy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
//发现轮廓得到的候选点
vector<vector<Point>> convexs(contours.size());
for (size_t i = 0; i < contours.size(); i++)
{
convexHull(contours[i], convexs[i], false, true);
}
// 绘制
vector<Vec4i> empty(0);
for (size_t k = 0; k < contours.size(); k++)
{
drawContours(dst, convexs, k, Scalar(0, 0, 255), 5, LINE_8, empty, 0, Point(0, 0));
}
}
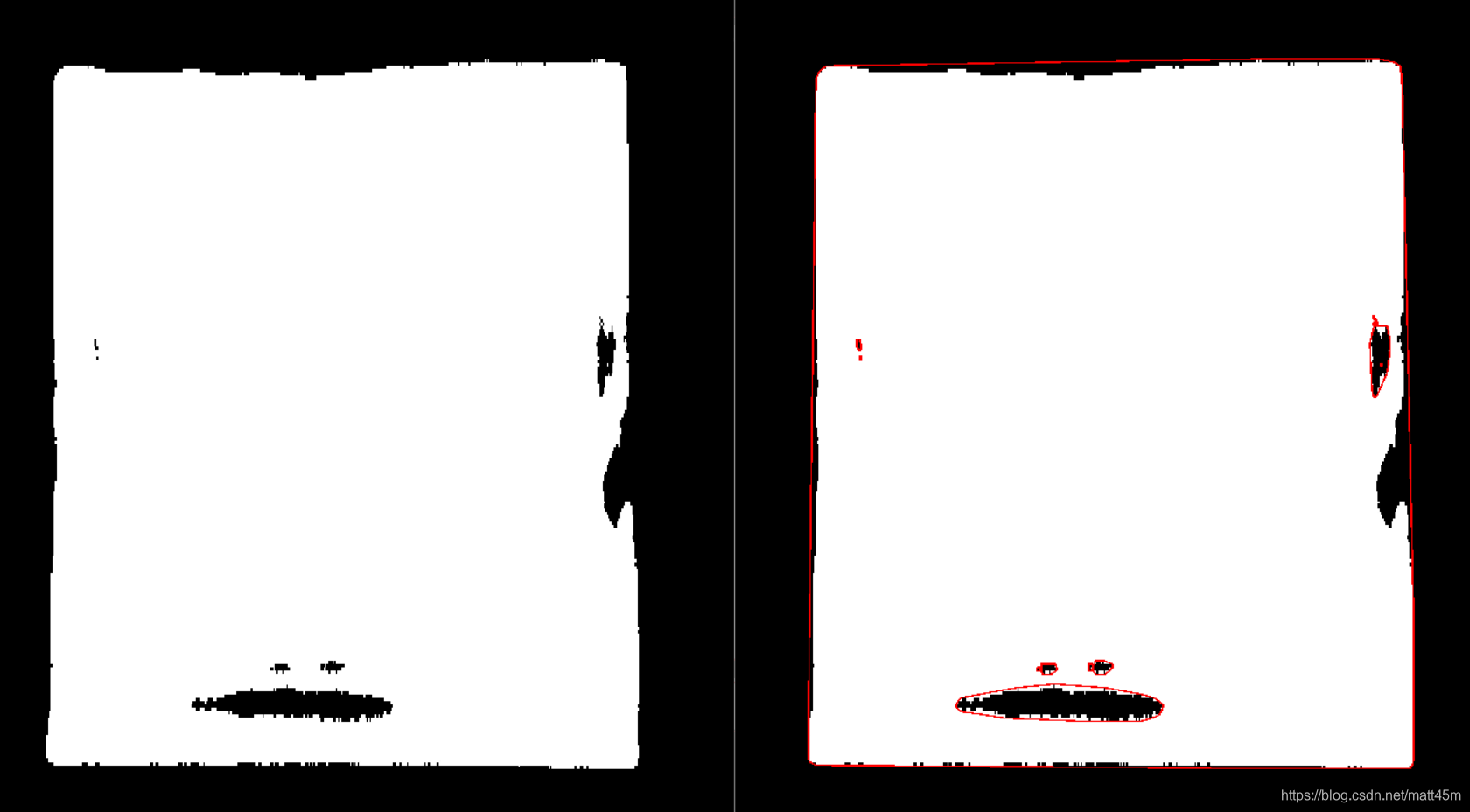
3.运行结果