基于ROBOGUIDE软件离线点动机器人


一、实践目的
1、熟悉FANUC机器人的操作面板、菜单;
2、 熟悉FANUC机器人的示教器的操作;
3、熟悉FANUC机器人的示教坐标:关节坐标(JOINT)、世界坐标/全局坐标(WORD)、手动坐标(JGFRM)、工具坐标(TOOL)。
二、安全注意事项
将安全注意事项分为“危险”、“注意”、“强制”、“禁止”四种等级,并配以不同的符号以引起使用者的注意。使用(安装、运转、保修、检修等)前,请务必熟读并掌握工业机器人说明书和其他附属资料,在熟知全部机器知识、安全事项及注意事项后再开始使用。
三、实践内容和步骤
3.1 创建机器人工作单元Workcell的仿真环境
打开Roboguide软件,如图1所示:点击主菜单File→New Cell


如图3,输入机器人工作站名称Example1,点击Next;

如图4,选用默认选项,点击Next;

如图1-5,选用V8.3选项,点击Next;

如图6,选用默认选项,点击Next;

如图7,选用H721,R-2000ic、165F选项,点击Next;

如图8,选用默认选项,点击Next;

如图9,选用默认选项(第一语言设为中文),点击Next;

如图10,选用默认选项,点击Finish;

如图11,进入到机器人工作站仿真环境中。


3.2将示教器开关置为“on”档
3.3熟悉速度倍率键的使用
(1)按 ,观察TP显示器数据变化趋势是:100%5%之间按5%变化;5%1%按照1%变化;之后按照低速、微速变化 ;
,观察TP显示器数据变化趋势是:100%5%之间按5%变化;5%1%按照1%变化;之后按照低速、微速变化 ;
(2)按【shift】键及,观察TP显示器数据变化趋势是:100%5%之间按5%变化;5%1%按照1%变化;之后按照低速、微速变化 ;
(3)更改系统变量$SHFTOV-ENB=1,再按【shift】键及,观察TP显示器数据变化趋势是: 整体按照100%50%5%1%低速%~微速趋势变化 ;


(4) 按【shift】键+各个关节运动键,观察机器人的姿态变化。

(5) 在上述点动过程中,利用手动改变速度。

3.4 熟悉机器人关节坐标(JOINT):
(1)按【COORD】键,使得示教坐标系为【JOINT】
(2)按【POSN】键,然后按F2(关节坐标),调整机器人当前位置与下图数据一致。

(3)按【shift】键+各个关节运动键,观察机器人示教器显示数据变化;

3.5 熟悉机器人世界坐标/全局坐标(WORD)、手动坐标(JGFRM)
(1)按【COORD】键,使得示教坐标系为世界坐标/全局坐标(WORD)、手动坐标(JGFRM);
(2)按【POSN】键,然后按F4(WORD),观察机器人的执行位置在全局坐标下的位置数据。

(3)按【shift】键+各个运动键,观察屏幕内数据及机器人的姿态变化;

(4)按以上操作,分别对不同的运动键进行操作,观察机器人的姿态变化。

3.6熟悉机器人工具坐标(TOOL)
(1)按【COORD】键,使得示教坐标系为工具坐标(TOOL);

(2)按【shift】键+各个运动键,观察机器人的姿态变化;
(3)按【COORD】键,切换成关节坐标系(JOINT),把机器人调整到J5=90.00,其他轴的位置为:0.00

(4)按【COORD】键,在切换成【TOOL】(工具坐标);
(5)再按【shift】键+各个运动键,观察机器人的姿态变化。

说明


3.7 利用位置寄存器移动机器人
(1)在如下画面,设定PR1和PR2的值


(2)请在寄存器画面分别将机器人移动到PR1和PR2。

3.8 利用快捷方式移动机器人
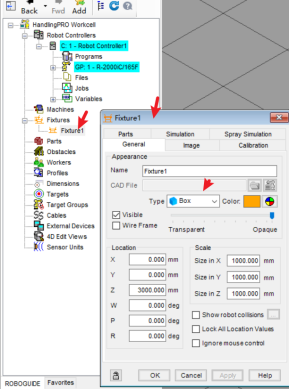
(1)建立一个fixture
(2)用鼠标可以实现机器人TCP 点快速运动到目标面、边、点或者圆中心,
方法如下:运动到面:Ctrl+Shift+左键
运动到边:Ctrl+Alt+左键
运动到顶点:Ctrl+Alt+Shift+左键


3.9 利用示教器面板的Current Position功能和Relative进行点动机器人。

四、实践结果与分析
综上结论:工具坐标(TOOL)点动机器人时,以机器人底座为参考面,在上述线框两个位置时,按同样的运动键,机器人的运动方向是否一致: 不一致; 以机器人的6轴法兰为参考面,在上述两个位置时按同样的运动键,机器人的运动方向是否一致: 一致 ;
工具坐标
- 位置一:

- 位置二

世界坐标
- 位置一:

- 位置二:

请分析造成上述现象的原因:
请思考还有没有别的方式移动机人?
