一.主要内容
- 变换公式的推导
- 齐次坐标的理解
- 变换矩阵的推导
二.平移、缩放、旋转的变换公式推导
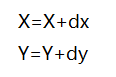
1.平移
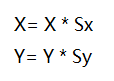
2.缩放
Sx、Sy是缩放因子
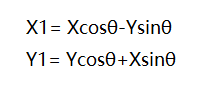
3.旋转

- 一般来说,单位圆的坐标(X,Y)可以写作(cosα,sinα);若圆的半径为R,则坐标可以表示为(Rcosα,Rsinα)。
- 若坐标绕原点旋转θ度,则坐标可以表示为
(X1,Y1)= (Rcos(α+θ),Rsin(α+θ))
该等式化简可得
(X1,Y1)= (Xcosθ-Ysinθ,Ycosθ+Xsinθ)
那么旋转的互换公式就是
三、齐次坐标
1.百度百科里面这样讲:
- 齐次坐标就是将一个原本是n维的向量用一个n+1维向量来表示,是指一个用于投影几何里的坐标系统,如同用于欧氏几何里的笛卡儿坐标一般。
2.作用
- 其一是区分向量和点
- 其二是易于进行仿射变化
3.个人理解
把齐次坐标当做一种表示方法,用来区分向量与坐标。例如( x , y )在二维空间中可以表示向量也可以表示坐标,为了避免在使用中的混淆,我们将向量( x , y )记做(x, y, z, 0) ,表示坐标系中的一个有向线段;将坐标点表示为(x, y, z, 1) ,表示坐标系中一个固定的坐标点。
四、几何变换矩阵推广
注意:这里我们变换的是二维平面中的点
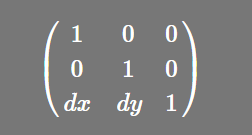
1.平移
将(x,y,0)的转换过程用矩阵来表示

我们可以得出这个几何变换矩阵为:
2.缩放
将(x,y,0)的转换过程用矩阵来表示

我们可以得出这个几何变换矩阵为:

3.旋转
将(x,y,0)的转换过程用矩阵来表示

我们可以得出这个几何变换矩阵为:

