1、 背景介绍
最近项目中使用了盛科的交换芯片8086,该交换芯片除了使用PCIE连接到zynq外,还提供了四根GPIO引脚连入zynq。盛科技术人员的说法是该芯片支持GPIO管脚中断和PCIE MSI中断,使用过程中二选一即可。目前PCIE MSI中断已经解决,需要调试GPIO管脚中断方式,ZYNQ连接示意图如下。
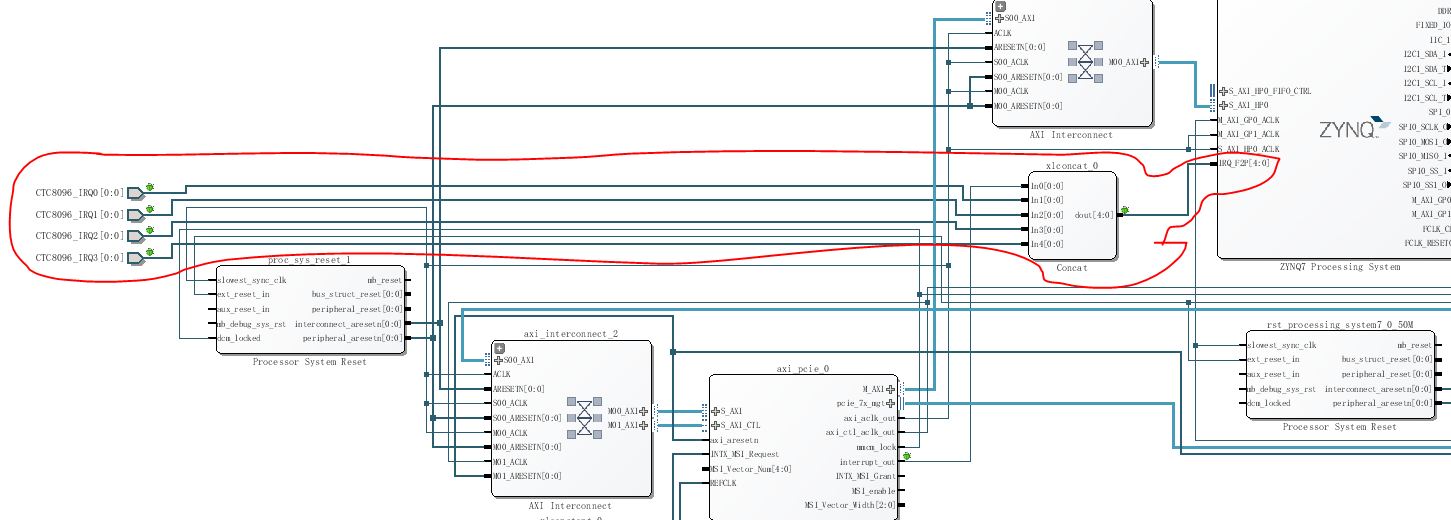
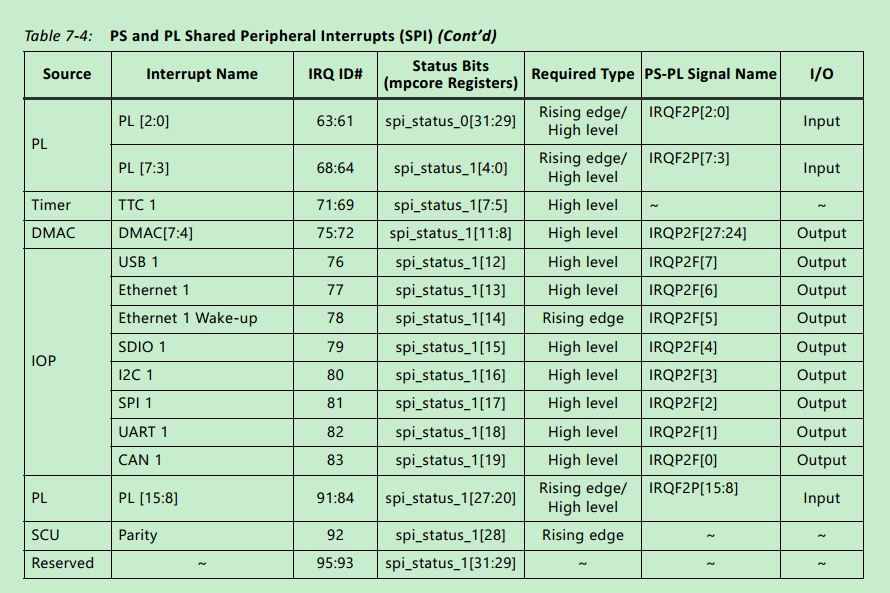
如上图所示,四根线之间连入一个concat,再加上PCIE的引脚,组成一个向量连入zynq的IRQ管脚。Zynq中启用了PL-PS的中断,分配的中断号为61-65.
2、 UIO机制引入
通常来说,zynq上挂接的中断都需要与一个控制器或IP核相对应,比如i2c,网络等,可以在devicetree中看到中断号,如下图
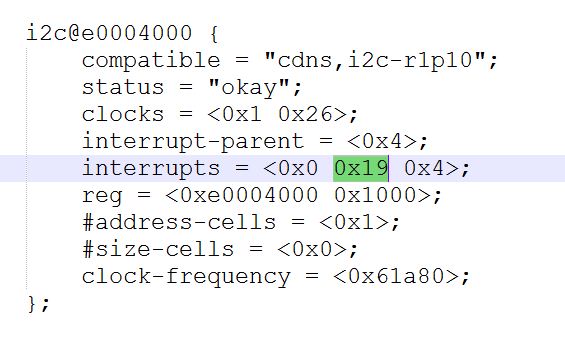
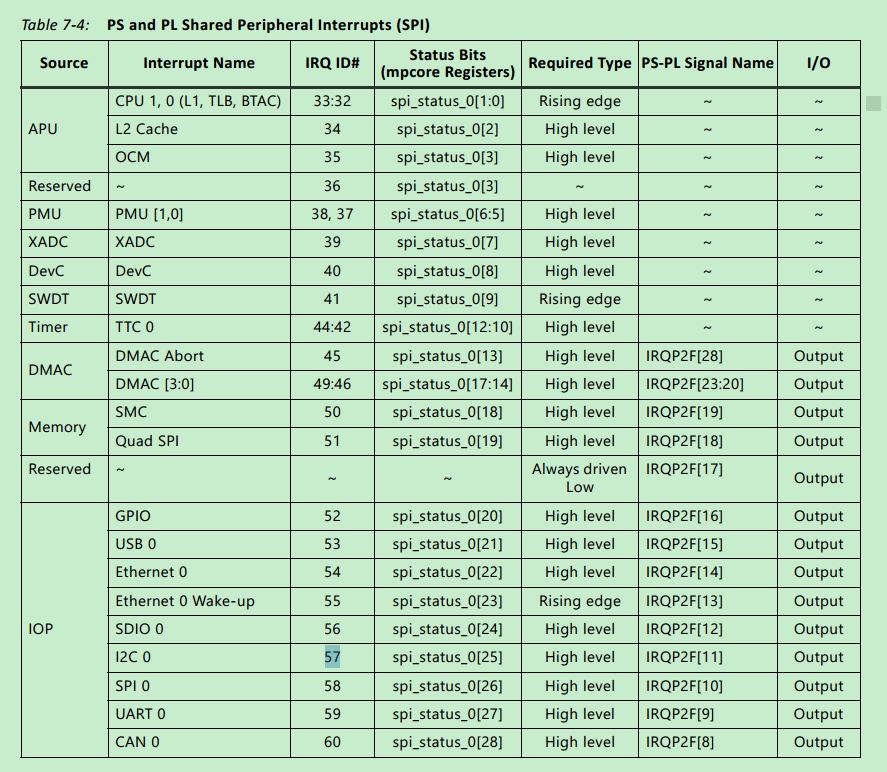
该中断号与UG585中中断描述的章节相一致,下表中的IRQ ID为对应设备的中断号+32的值(0x19+32=57,正好是i2c0的IRQ ID)
对于这种四根线直接接入的,devicetree中没有对应的设备,导致在操作系统中看不到中断。幸运的是Linux内核中提供了UIO机制,详细介绍见:https://01.org/linuxgraphics/gfx-docs/drm/driver-api/uio-howto.html
对我而言,UIO就是处理没有具体设备只有引脚的一种机制。
3、 devicetree设置
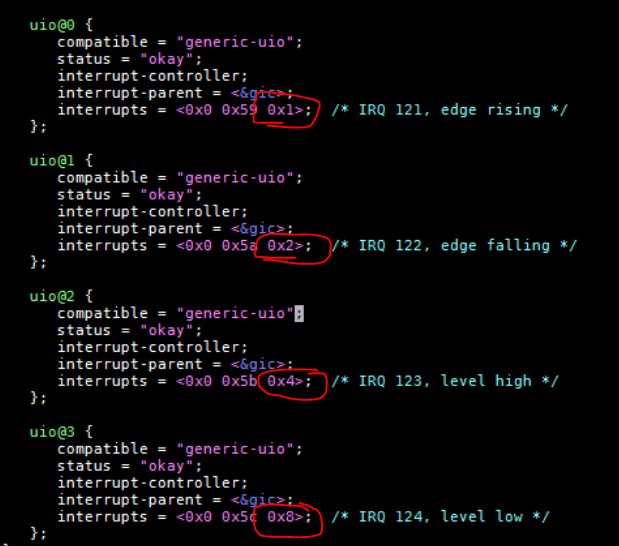
利用UIO,可以在devicetree中为四根GPIO线设置对应的设备,如下图所示。
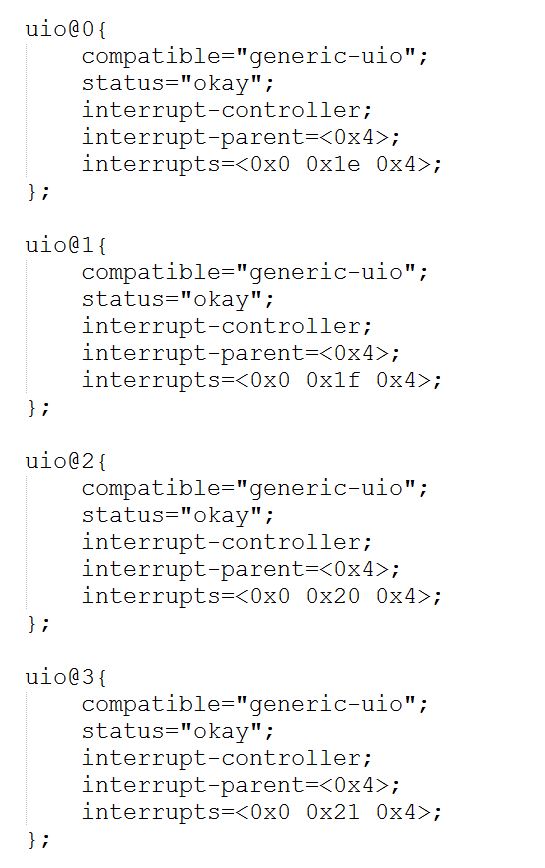
四根线对应的中断号为0x1e-0x21,正好是62-65号中断。同时,需要修改devicetree启动项。

让操作系统在加载过程中执行uio驱动程序。
devicetree.dts全部代码如下:
/dts-v1/;
/ {
#address-cells = <0x1>;
#size-cells = <0x1>;
compatible = "xlnx,zynq-7000";
cpus {
#address-cells = <0x1>;
#size-cells = <0x0>;
cpu@0 {
compatible = "arm,cortex-a9";
device_type = "cpu";
reg = <0x0>;
clocks = <0x1 0x3>;
clock-latency = <0x3e8>;
cpu0-supply = <0x2>;
operating-points = <0xa4cb8 0xf4240 0x5265c 0xf4240>;
};
cpu@1 {
compatible = "arm,cortex-a9";
device_type = "cpu";
reg = <0x1>;
clocks = <0x1 0x3>;
};
};
fpga-full {
compatible = "fpga-region";
fpga-mgr = <0x3>;
#address-cells = <0x1>;
#size-cells = <0x1>;
ranges;
};
pmu@f8891000 {
compatible = "arm,cortex-a9-pmu";
interrupts = <0x0 0x5 0x4 0x0 0x6 0x4>;
interrupt-parent = <0x4>;
reg = <0xf8891000 0x1000 0xf8893000 0x1000>;
};
fixedregulator {
compatible = "regulator-fixed";
regulator-name = "VCCPINT";
regulator-min-microvolt = <0xf4240>;
regulator-max-microvolt = <0xf4240>;
regulator-boot-on;
regulator-always-on;
linux,phandle = <0x2>;
phandle = <0x2>;
};
amba {
u-boot,dm-pre-reloc;
compatible = "simple-bus";
#address-cells = <0x1>;
#size-cells = <0x1>;
interrupt-parent = <0x4>;
ranges;
adc@f8007100 {
compatible = "xlnx,zynq-xadc-1.00.a";
reg = <0xf8007100 0x20>;
interrupts = <0x0 0x7 0x4>;
interrupt-parent = <0x4>;
clocks = <0x1 0xc>;
};
can@e0008000 {
compatible = "xlnx,zynq-can-1.0";
status = "disabled";
clocks = <0x1 0x13 0x1 0x24>;
clock-names = "can_clk", "pclk";
reg = <0xe0008000 0x1000>;
interrupts = <0x0 0x1c 0x4>;
interrupt-parent = <0x4>;
tx-fifo-depth = <0x40>;
rx-fifo-depth = <0x40>;
};
can@e0009000 {
compatible = "xlnx,zynq-can-1.0";
status = "disabled";
clocks = <0x1 0x14 0x1 0x25>;
clock-names = "can_clk", "pclk";
reg = <0xe0009000 0x1000>;
interrupts = <0x0 0x33 0x4>;
interrupt-parent = <0x4>;
tx-fifo-depth = <0x40>;
rx-fifo-depth = <0x40>;
};
gpio@e000a000 {
compatible = "xlnx,zynq-gpio-1.0";
#gpio-cells = <0x2>;
clocks = <0x1 0x2a>;
gpio-controller;
interrupt-controller;
#interrupt-cells = <0x2>;
interrupt-parent = <0x4>;
interrupts = <0x0 0x14 0x4>;
reg = <0xe000a000 0x1000>;
};
i2c@e0004000 {
compatible = "cdns,i2c-r1p10";
status = "okay";
clocks = <0x1 0x26>;
interrupt-parent = <0x4>;
interrupts = <0x0 0x19 0x4>;
reg = <0xe0004000 0x1000>;
#address-cells = <0x1>;
#size-cells = <0x0>;
clock-frequency = <0x61a80>;
};
i2c@e0005000 {
compatible = "cdns,i2c-r1p10";
status = "okay";
clocks = <0x1 0x27>;
interrupt-parent = <0x4>;
interrupts = <0x0 0x30 0x4>;
reg = <0xe0005000 0x1000>;
#address-cells = <0x1>;
#size-cells = <0x0>;
clock-frequency = <0x61a80>;
};
interrupt-controller@f8f01000 {
compatible = "arm,cortex-a9-gic";
#interrupt-cells = <0x3>;
interrupt-controller;
reg = <0xf8f01000 0x1000 0xf8f00100 0x100>;
num_cpus = <0x2>;
num_interrupts = <0x60>;
linux,phandle = <0x4>;
phandle = <0x4>;
};
cache-controller@f8f02000 {
compatible = "arm,pl310-cache";
reg = <0xf8f02000 0x1000>;
interrupts = <0x0 0x2 0x4>;
arm,data-latency = <0x3 0x2 0x2>;
arm,tag-latency = <0x2 0x2 0x2>;
cache-unified;
cache-level = <0x2>;
};
memory-controller@f8006000 {
compatible = "xlnx,zynq-ddrc-a05";
reg = <0xf8006000 0x1000>;
};
ocmc@f800c000 {
compatible = "xlnx,zynq-ocmc-1.0";
interrupt-parent = <0x4>;
interrupts = <0x0 0x3 0x4>;
reg = <0xf800c000 0x1000>;
};
serial@e0000000 {
compatible = "xlnx,xuartps", "cdns,uart-r1p8";
status = "okay";
clocks = <0x1 0x17 0x1 0x28>;
clock-names = "uart_clk", "pclk";
reg = <0xe0000000 0x1000>;
interrupts = <0x0 0x1b 0x4>;
device_type = "serial";
port-number = <0x0>;
};
serial@e0001000 {
compatible = "xlnx,xuartps", "cdns,uart-r1p8";
status = "disabled";
clocks = <0x1 0x18 0x1 0x29>;
clock-names = "uart_clk", "pclk";
reg = <0xe0001000 0x1000>;
interrupts = <0x0 0x32 0x4>;
};
spi@e0006000 {
compatible = "xlnx,zynq-spi-r1p6";
reg = <0xe0006000 0x1000>;
status = "okay";
interrupt-parent = <0x4>;
interrupts = <0x0 0x1a 0x4>;
clocks = <0x1 0x19 0x1 0x22>;
clock-names = "ref_clk", "pclk";
#address-cells = <0x1>;
#size-cells = <0x0>;
is-decoded-cs = <0x0>;
num-cs = <0x3>;
};
spi@e0007000 {
compatible = "xlnx,zynq-spi-r1p6";
reg = <0xe0007000 0x1000>;
status = "disabled";
interrupt-parent = <0x4>;
interrupts = <0x0 0x31 0x4>;
clocks = <0x1 0x1a 0x1 0x23>;
clock-names = "ref_clk", "pclk";
#address-cells = <0x1>;
#size-cells = <0x0>;
};
spi@e000d000 {
clock-names = "ref_clk", "pclk";
clocks = <0x1 0xa 0x1 0x2b>;
compatible = "xlnx,zynq-qspi-1.0";
status = "okay";
interrupt-parent = <0x4>;
interrupts = <0x0 0x13 0x4>;
reg = <0xe000d000 0x1000>;
#address-cells = <0x1>;
#size-cells = <0x0>;
is-dual = <0x0>;
num-cs = <0x1>;
};
memory-controller@e000e000 {
#address-cells = <0x1>;
#size-cells = <0x1>;
status = "disabled";
clock-names = "memclk", "aclk";
clocks = <0x1 0xb 0x1 0x2c>;
compatible = "arm,pl353-smc-r2p1";
interrupt-parent = <0x4>;
interrupts = <0x0 0x12 0x4>;
ranges;
reg = <0xe000e000 0x1000>;
flash@e1000000 {
status = "disabled";
compatible = "arm,pl353-nand-r2p1";
reg = <0xe1000000 0x1000000>;
#address-cells = <0x1>;
#size-cells = <0x1>;
};
flash@e2000000 {
status = "disabled";
compatible = "cfi-flash";
reg = <0xe2000000 0x2000000>;
#address-cells = <0x1>;
#size-cells = <0x1>;
};
};
ethernet@e000b000 {
compatible = "xlnx,ps7-ethernet-1.00.a";
reg = <0xe000b000 0x1000>;
status = "okay";
interrupts = <0x0 0x16 0x4>;
clocks = <0x1 0xd 0x1 0x1e>;
clock-names = "ref_clk", "aper_clk";
#address-cells = <0x1>;
#size-cells = <0x0>;
enet-reset = <0x4 0x2f 0x0>;
local-mac-address = [00 0a 35 00 00 00];
phy-mode = "rgmii";
phy-handle = <0x7>;
xlnx,eth-mode = <0x1>;
xlnx,has-mdio = <0x1>;
xlnx,ptp-enet-clock = <0x69f6bcb>;
mdio {
#address-cells = <0x1>;
#size-cells = <0x0>;
phy@0 {
compatible = "marvell,88e1111";
device_type = "ethernet-phy";
reg = <0x0>;
linux,phandle = <0x7>;
phandle = <0x7>;
};
};
};
ethernet@e000c000 {
compatible = "cdns,zynq-gem", "cdns,gem";
reg = <0xe000c000 0x1000>;
status = "disabled";
interrupts = <0x0 0x2d 0x4>;
clocks = <0x1 0x1f 0x1 0x1f 0x1 0xe>;
clock-names = "pclk", "hclk", "tx_clk";
#address-cells = <0x1>;
#size-cells = <0x0>;
};
sdhci@e0100000 {
compatible = "arasan,sdhci-8.9a";
status = "disabled";
clock-names = "clk_xin", "clk_ahb";
clocks = <0x1 0x15 0x1 0x20>;
interrupt-parent = <0x4>;
interrupts = <0x0 0x18 0x4>;
reg = <0xe0100000 0x1000>;
};
sdhci@e0101000 {
compatible = "arasan,sdhci-8.9a";
status = "disabled";
clock-names = "clk_xin", "clk_ahb";
clocks = <0x1 0x16 0x1 0x21>;
interrupt-parent = <0x4>;
interrupts = <0x0 0x2f 0x4>;
reg = <0xe0101000 0x1000>;
};
slcr@f8000000 {
#address-cells = <0x1>;
#size-cells = <0x1>;
compatible = "xlnx,zynq-slcr", "syscon", "simple-mfd";
reg = <0xf8000000 0x1000>;
ranges;
linux,phandle = <0x5>;
phandle = <0x5>;
clkc@100 {
#clock-cells = <0x1>;
compatible = "xlnx,ps7-clkc";
fclk-enable = <0x1>;
clock-output-names = "armpll", "ddrpll", "iopll", "cpu_6or4x", "cpu_3or2x", "cpu_2x", "cpu_1x", "ddr2x", "ddr3x", "dci", "lqspi", "smc", "pcap", "gem0", "gem1", "fclk0", "fclk1", "fclk2", "fclk3", "can0", "can1", "sdio0", "sdio1", "uart0", "uart1", "spi0", "spi1", "dma", "usb0_aper", "usb1_aper", "gem0_aper", "gem1_aper", "sdio0_aper", "sdio1_aper", "spi0_aper", "spi1_aper", "can0_aper", "can1_aper", "i2c0_aper", "i2c1_aper", "uart0_aper", "uart1_aper", "gpio_aper", "lqspi_aper", "smc_aper", "swdt", "dbg_trc", "dbg_apb";
reg = <0x100 0x100>;
ps-clk-frequency = <0x2faf080>;
linux,phandle = <0x1>;
phandle = <0x1>;
};
rstc@200 {
compatible = "xlnx,zynq-reset";
reg = <0x200 0x48>;
#reset-cells = <0x1>;
syscon = <0x5>;
};
pinctrl@700 {
compatible = "xlnx,pinctrl-zynq";
reg = <0x700 0x200>;
syscon = <0x5>;
};
};
dmac@f8003000 {
compatible = "arm,pl330", "arm,primecell";
reg = <0xf8003000 0x1000>;
interrupt-parent = <0x4>;
interrupt-names = "abort", "dma0", "dma1", "dma2", "dma3", "dma4", "dma5", "dma6", "dma7";
interrupts = <0x0 0xd 0x4 0x0 0xe 0x4 0x0 0xf 0x4 0x0 0x10 0x4 0x0 0x11 0x4 0x0 0x28 0x4 0x0 0x29 0x4 0x0 0x2a 0x4 0x0 0x2b 0x4>;
#dma-cells = <0x1>;
#dma-channels = <0x8>;
#dma-requests = <0x4>;
clocks = <0x1 0x1b>;
clock-names = "apb_pclk";
};
devcfg@f8007000 {
compatible = "xlnx,zynq-devcfg-1.0";
interrupt-parent = <0x4>;
interrupts = <0x0 0x8 0x4>;
reg = <0xf8007000 0x100>;
clocks = <0x1 0xc 0x1 0xf 0x1 0x10 0x1 0x11 0x1 0x12>;
clock-names = "ref_clk", "fclk0", "fclk1", "fclk2", "fclk3";
syscon = <0x5>;
linux,phandle = <0x3>;
phandle = <0x3>;
};
efuse@f800d000 {
compatible = "xlnx,zynq-efuse";
reg = <0xf800d000 0x20>;
};
timer@f8f00200 {
compatible = "arm,cortex-a9-global-timer";
reg = <0xf8f00200 0x20>;
interrupts = <0x1 0xb 0x301>;
interrupt-parent = <0x4>;
clocks = <0x1 0x4>;
};
timer@f8001000 {
interrupt-parent = <0x4>;
interrupts = <0x0 0xa 0x4 0x0 0xb 0x4 0x0 0xc 0x4>;
compatible = "cdns,ttc";
clocks = <0x1 0x6>;
reg = <0xf8001000 0x1000>;
};
timer@f8002000 {
interrupt-parent = <0x4>;
interrupts = <0x0 0x25 0x4 0x0 0x26 0x4 0x0 0x27 0x4>;
compatible = "cdns,ttc";
clocks = <0x1 0x6>;
reg = <0xf8002000 0x1000>;
};
timer@f8f00600 {
interrupt-parent = <0x4>;
interrupts = <0x1 0xd 0x301>;
compatible = "arm,cortex-a9-twd-timer";
reg = <0xf8f00600 0x20>;
clocks = <0x1 0x4>;
};
usb@e0002000 {
compatible = "xlnx,zynq-usb-2.20a", "chipidea,usb2";
status = "disabled";
clocks = <0x1 0x1c>;
interrupt-parent = <0x4>;
interrupts = <0x0 0x15 0x4>;
reg = <0xe0002000 0x1000>;
phy_type = "ulpi";
};
usb@e0003000 {
compatible = "xlnx,zynq-usb-2.20a", "chipidea,usb2";
status = "disabled";
clocks = <0x1 0x1d>;
interrupt-parent = <0x4>;
interrupts = <0x0 0x2c 0x4>;
reg = <0xe0003000 0x1000>;
phy_type = "ulpi";
};
watchdog@f8005000 {
clocks = <0x1 0x2d>;
compatible = "cdns,wdt-r1p2";
interrupt-parent = <0x4>;
interrupts = <0x0 0x9 0x1>;
reg = <0xf8005000 0x1000>;
timeout-sec = <0xa>;
};
};
amba_pl {
#address-cells = <0x1>;
#size-cells = <0x1>;
compatible = "simple-bus";
ranges;
gpio@41200000 {
#gpio-cells = <0x2>;
compatible = "xlnx,xps-gpio-1.00.a";
gpio-controller;
reg = <0x41200000 0x10000>;
xlnx,all-inputs = <0x0>;
xlnx,all-inputs-2 = <0x0>;
xlnx,all-outputs = <0x1>;
xlnx,all-outputs-2 = <0x0>;
xlnx,dout-default = <0x0>;
xlnx,dout-default-2 = <0x0>;
xlnx,gpio-width = <0x8>;
xlnx,gpio2-width = <0x20>;
xlnx,interrupt-present = <0x0>;
xlnx,is-dual = <0x0>;
xlnx,tri-default = <0xffffffff>;
xlnx,tri-default-2 = <0xffffffff>;
};
uio@0{
compatible="generic-uio";
status="okay";
interrupt-controller;
interrupt-parent=<0x4>;
interrupts=<0x0 0x1e 0x4>;
};
uio@1{
compatible="generic-uio";
status="okay";
interrupt-controller;
interrupt-parent=<0x4>;
interrupts=<0x0 0x1f 0x4>;
};
uio@2{
compatible="generic-uio";
status="okay";
interrupt-controller;
interrupt-parent=<0x4>;
interrupts=<0x0 0x20 0x4>;
};
uio@3{
compatible="generic-uio";
status="okay";
interrupt-controller;
interrupt-parent=<0x4>;
interrupts=<0x0 0x21 0x4>;
};
axi-pcie@90000000 {
#address-cells = <0x3>;
#interrupt-cells = <0x1>;
#size-cells = <0x2>;
compatible = "xlnx,axi-pcie-host-1.00.a";
device_type = "pci";
interrupt-map = <0x0 0x0 0x0 0x1 0x6 0x1 0x0 0x0 0x0 0x2 0x6 0x2 0x0 0x0 0x0 0x3 0x6 0x3 0x0 0x0 0x0 0x4 0x6 0x4>;
interrupt-map-mask = <0x0 0x0 0x0 0x7>;
interrupt-parent = <0x4>;
interrupts = <0x0 0x1d 0x4>;
ranges = <0x2000000 0x0 0xa0000000 0xa0000000 0x0 0x20000000>;
reg = <0x90000000 0x4000000>;
interrupt-controller {
#address-cells = <0x0>;
#interrupt-cells = <0x1>;
interrupt-controller;
linux,phandle = <0x6>;
phandle = <0x6>;
};
};
};
chosen {
bootargs = "earlycon uio_pdrv_genirq.of_id=generic-uio";
stdout-path = "serial0:115200n8";
};
aliases {
ethernet0 = "/amba/ethernet@e000b000";
serial0 = "/amba/serial@e0000000";
spi0 = "/amba/spi@e000d000";
spi1 = "/amba/spi@e0006000";
};
memory {
device_type = "memory";
reg = <0x0 0x40000000>;
};
};
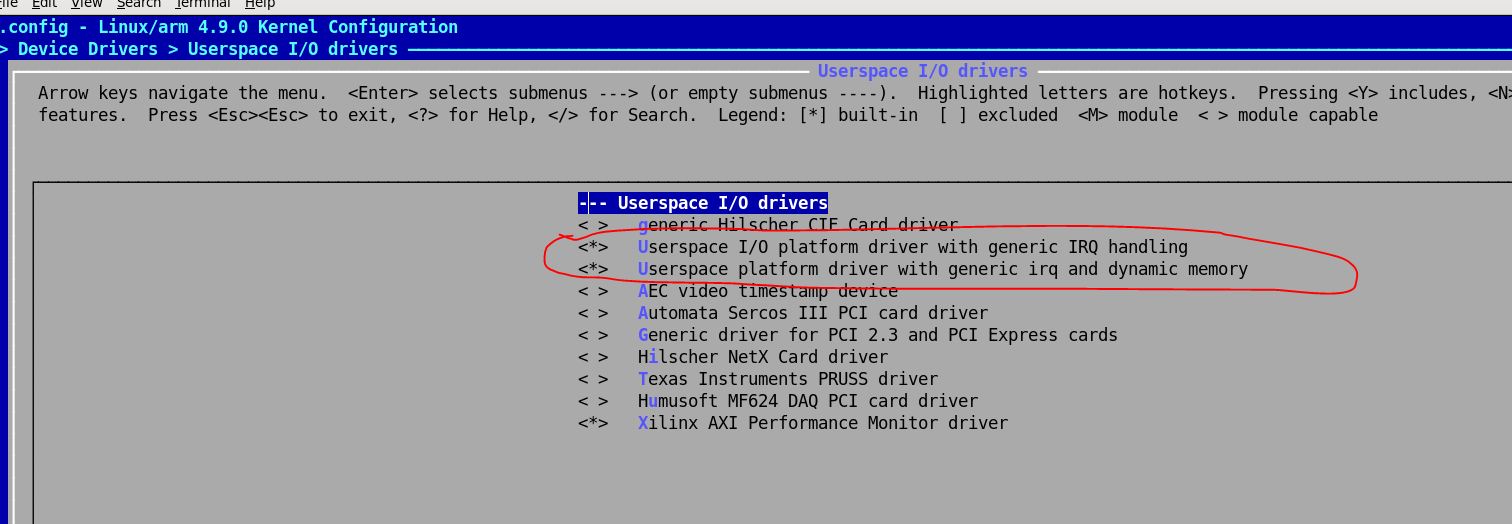
4、 kernel配置
在kernel中需要把UIO驱动编译进内核,这里使用的版本是XILINX 2017.4(内核版本4.9)。
5、 UIO测试
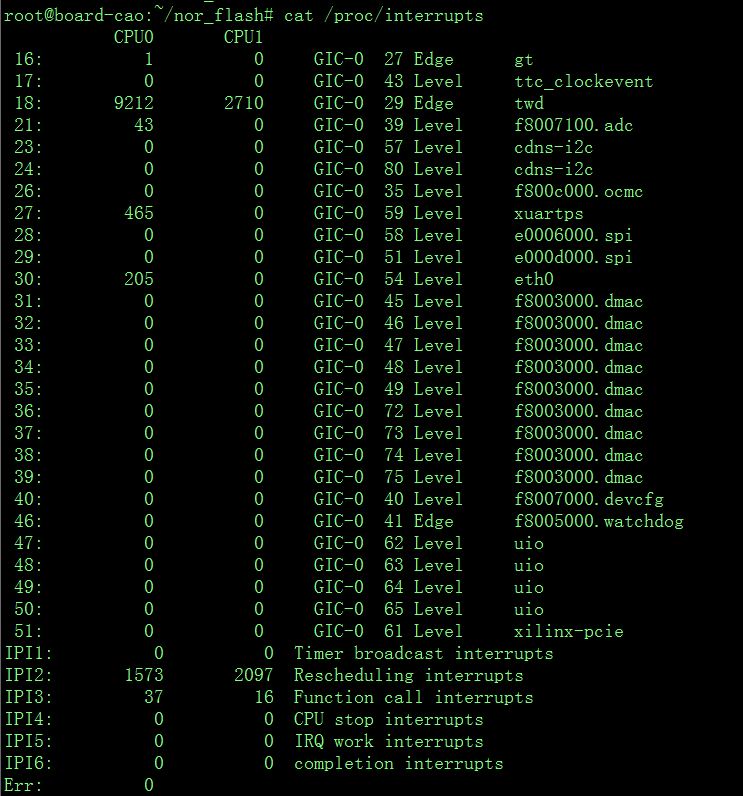
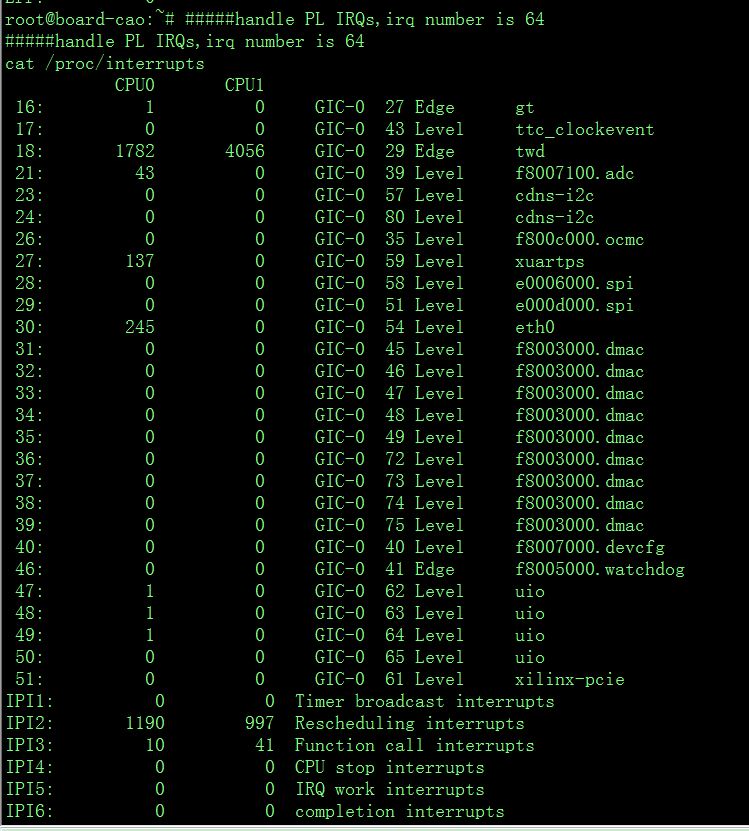
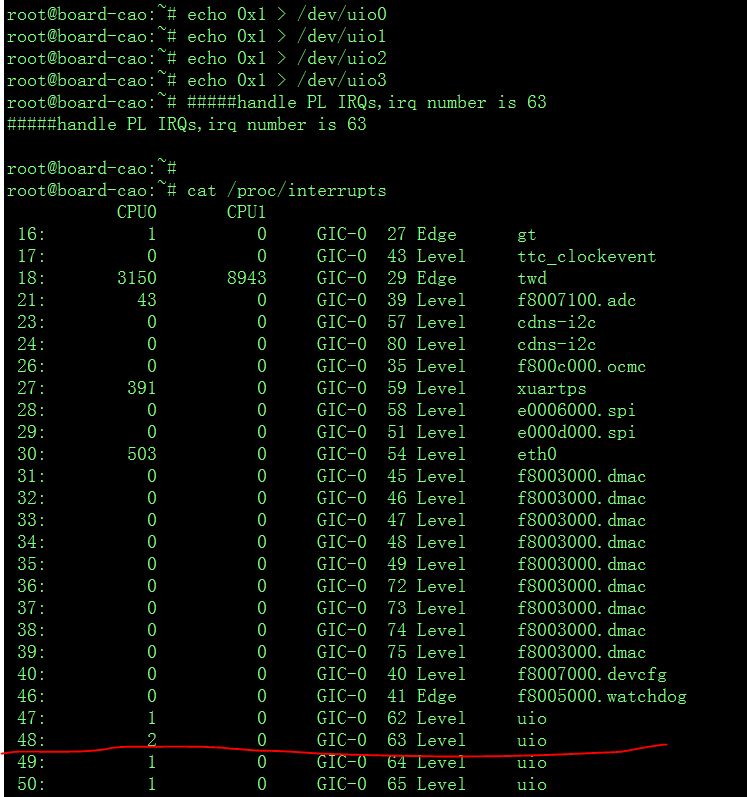
修改完devicetree和kernel,就可以启动linux对UIO进行测试了。这里通过cat /proc/interrupts看到的信息如下。
为了测试中断,需要在vivado中引入VIO机制,模拟四根线电平拉高拉低。示例代码如下:
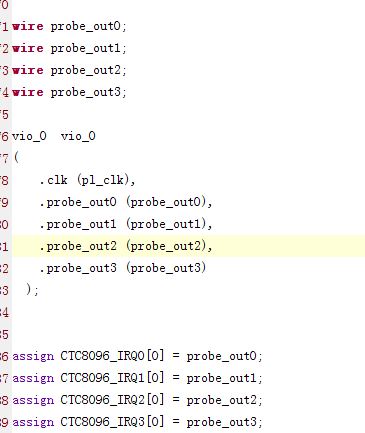
使用vio修改value值即可模拟
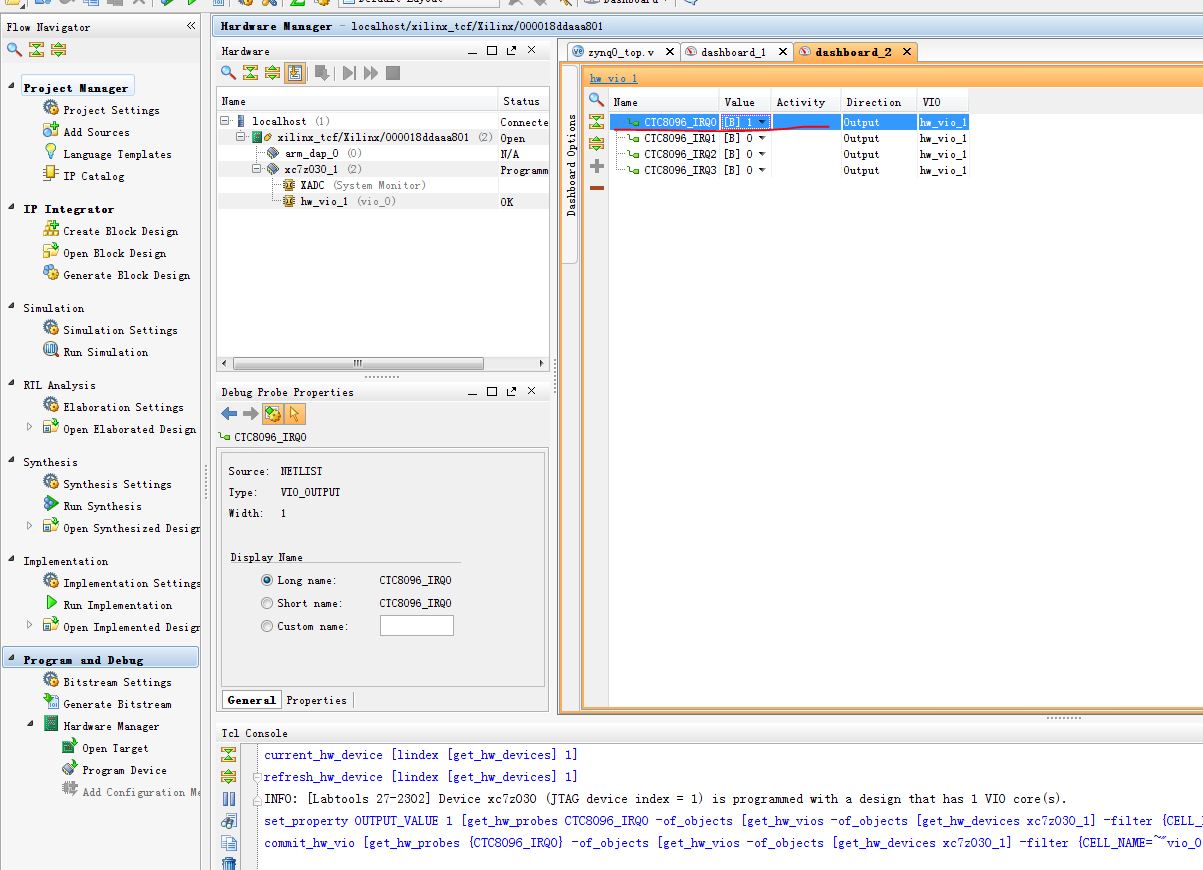
此时能发现确实收到了中断
不过UIO存在一个问题,当中断到来时,驱动处理函数中将该中断disable,导致每次只能响应一次。需要用户启用该中断shell中输入echo 0x1 > /dev/uioX 或者调用write()函数。
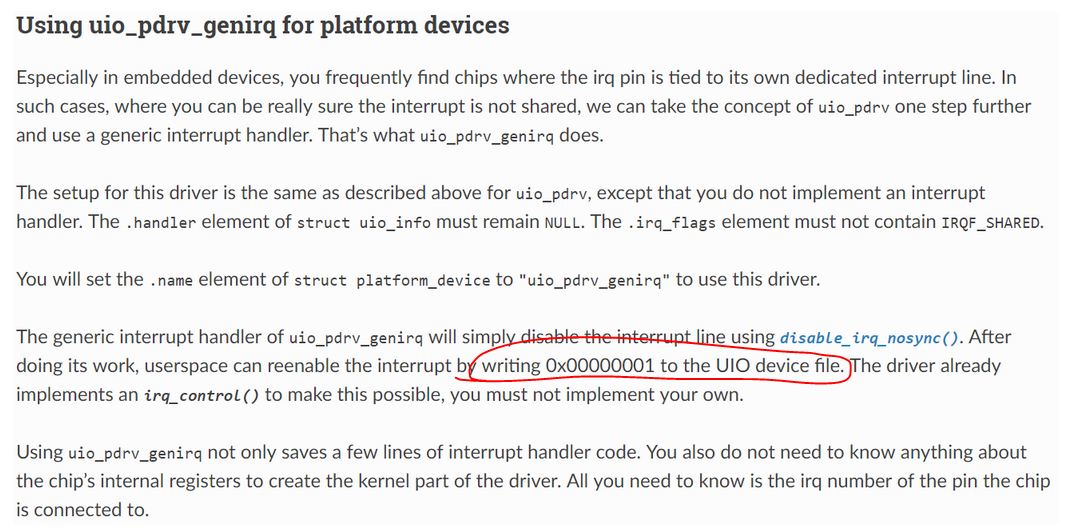
再次启用中断后,计数值增加了。
6、 用户自定义中断
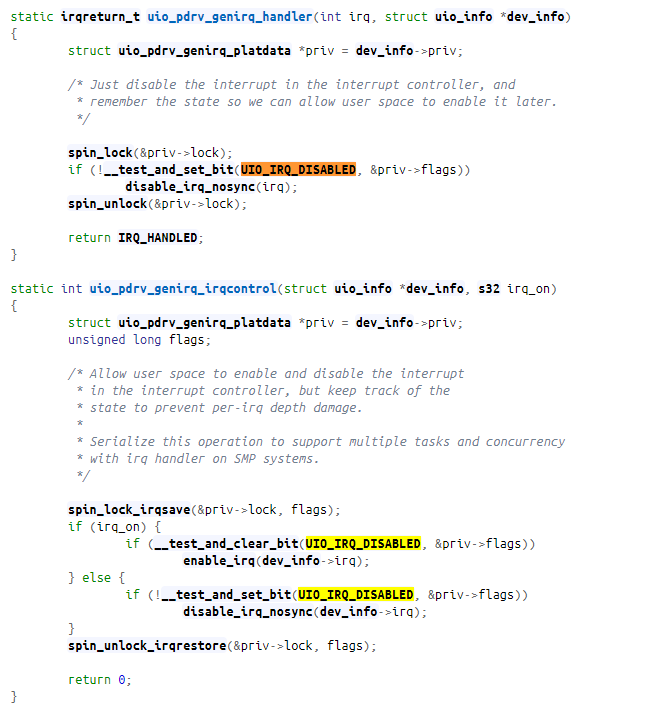
UIO机制中提供了中断响应函数,不过该处理函数只是禁中断,比较简单,用户完全可以对该函数进行修改,增加自己的处理过程,比如像下面这样
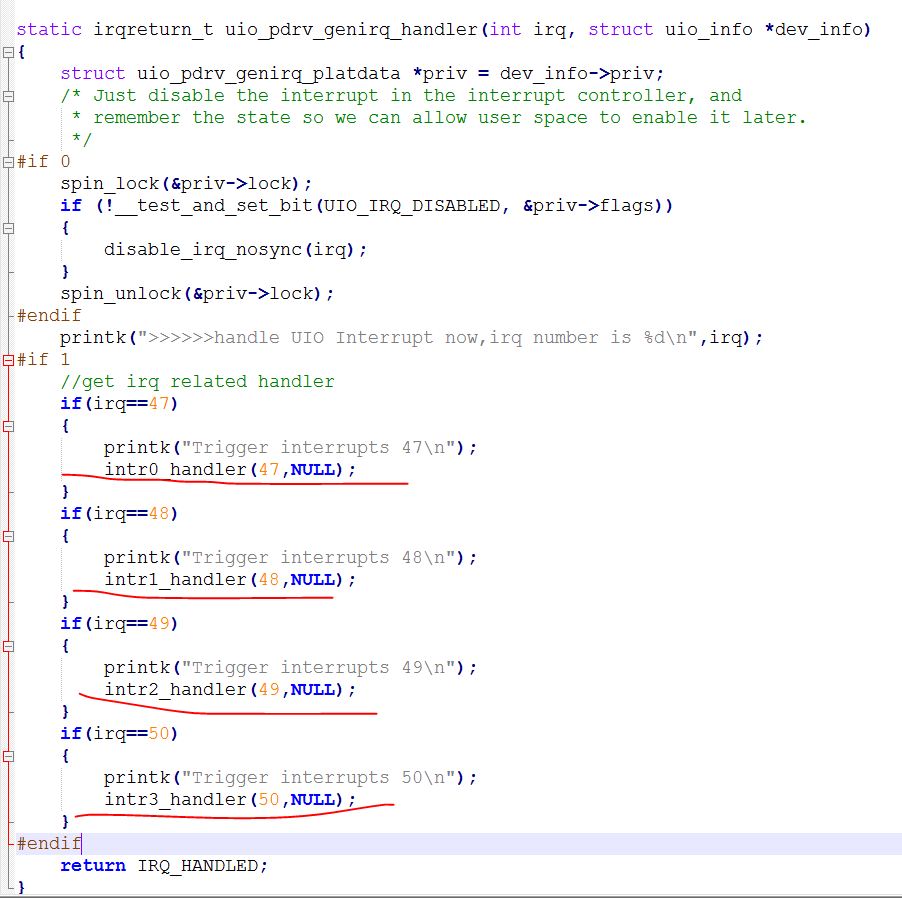
其中intrX_handler函数定义如下
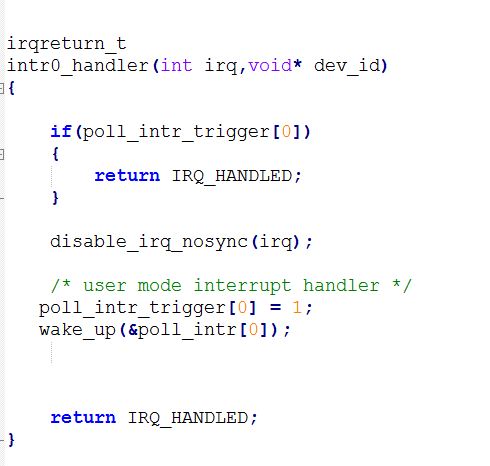
这样在中断来临时,就能触发自定义函数的执行。
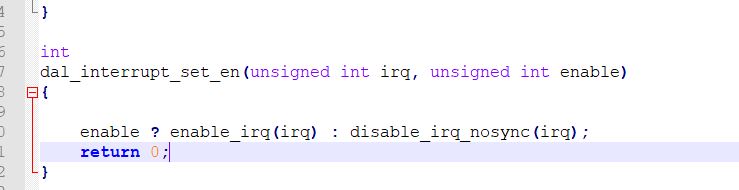
注意,在执行完自定义中断处理函数结束后enable对应的irq,否则就要像上面那样手动打开了。
uio驱动代码如下:
/*
* drivers/uio/uio_pdrv_genirq.c
*
* Userspace I/O platform driver with generic IRQ handling code.
*
* Copyright (C) 2008 Magnus Damm
*
* Based on uio_pdrv.c by Uwe Kleine-Koenig,
* Copyright (C) 2008 by Digi International Inc.
* All rights reserved.
*
* This program is free software; you can redistribute it and/or modify it
* under the terms of the GNU General Public License version 2 as published by
* the Free Software Foundation.
*/
#include <linux/platform_device.h>
#include <linux/uio_driver.h>
#include <linux/spinlock.h>
#include <linux/bitops.h>
#include <linux/module.h>
#include <linux/interrupt.h>
#include <linux/stringify.h>
#include <linux/pm_runtime.h>
#include <linux/slab.h>
#include <linux/of.h>
#include <linux/of_platform.h>
#include <linux/of_address.h>
#include "dal_kernel.h"
//extern static irqreturn_t intr0_handler(int irq,void* dev_id);
//extern static irqreturn_t intr1_handler(int irq,void* dev_id);
//extern static irqreturn_t intr2_handler(int irq,void* dev_id);
//extern static irqreturn_t intr3_handler(int irq,void* dev_id);
#define DRIVER_NAME "uio_pdrv_genirq"
struct uio_pdrv_genirq_platdata {
struct uio_info *uioinfo;
spinlock_t lock;
unsigned long flags;
struct platform_device *pdev;
};
/* Bits in uio_pdrv_genirq_platdata.flags */
enum {
UIO_IRQ_DISABLED = 0,
};
static int uio_pdrv_genirq_open(struct uio_info *info, struct inode *inode)
{
struct uio_pdrv_genirq_platdata *priv = info->priv;
/* Wait until the Runtime PM code has woken up the device */
pm_runtime_get_sync(&priv->pdev->dev);
return 0;
}
static int uio_pdrv_genirq_release(struct uio_info *info, struct inode *inode)
{
struct uio_pdrv_genirq_platdata *priv = info->priv;
/* Tell the Runtime PM code that the device has become idle */
pm_runtime_put_sync(&priv->pdev->dev);
return 0;
}
static irqreturn_t uio_pdrv_genirq_handler(int irq, struct uio_info *dev_info)
{
struct uio_pdrv_genirq_platdata *priv = dev_info->priv;
/* Just disable the interrupt in the interrupt controller, and
* remember the state so we can allow user space to enable it later.
*/
#if 0
spin_lock(&priv->lock);
if (!__test_and_set_bit(UIO_IRQ_DISABLED, &priv->flags))
{
disable_irq_nosync(irq);
}
spin_unlock(&priv->lock);
#endif
printk(">>>>>>handle UIO Interrupt now,irq number is %d\n",irq);
#if 1
//get irq related handler
if(irq==47)
{
printk("Trigger interrupts 47\n");
intr0_handler(47,NULL);
}
if(irq==48)
{
printk("Trigger interrupts 48\n");
intr1_handler(48,NULL);
}
if(irq==49)
{
printk("Trigger interrupts 49\n");
intr2_handler(49,NULL);
}
if(irq==50)
{
printk("Trigger interrupts 50\n");
intr3_handler(50,NULL);
}
#endif
return IRQ_HANDLED;
}
static int uio_pdrv_genirq_irqcontrol(struct uio_info *dev_info, s32 irq_on)
{
struct uio_pdrv_genirq_platdata *priv = dev_info->priv;
unsigned long flags;
/* Allow user space to enable and disable the interrupt
* in the interrupt controller, but keep track of the
* state to prevent per-irq depth damage.
*
* Serialize this operation to support multiple tasks and concurrency
* with irq handler on SMP systems.
*/
spin_lock_irqsave(&priv->lock, flags);
if (irq_on) {
if (__test_and_clear_bit(UIO_IRQ_DISABLED, &priv->flags))
enable_irq(dev_info->irq);
} else {
if (!__test_and_set_bit(UIO_IRQ_DISABLED, &priv->flags))
disable_irq_nosync(dev_info->irq);
}
spin_unlock_irqrestore(&priv->lock, flags);
return 0;
}
static int uio_pdrv_genirq_probe(struct platform_device *pdev)
{
struct uio_info *uioinfo = dev_get_platdata(&pdev->dev);
struct uio_pdrv_genirq_platdata *priv;
struct uio_mem *uiomem;
int ret = -EINVAL;
int i;
if (pdev->dev.of_node) {
/* alloc uioinfo for one device */
uioinfo = devm_kzalloc(&pdev->dev, sizeof(*uioinfo),
GFP_KERNEL);
if (!uioinfo) {
dev_err(&pdev->dev, "unable to kmalloc\n");
return -ENOMEM;
}
uioinfo->name = pdev->dev.of_node->name;
uioinfo->version = "devicetree";
/* Multiple IRQs are not supported */
}
if (!uioinfo || !uioinfo->name || !uioinfo->version) {
dev_err(&pdev->dev, "missing platform_data\n");
return ret;
}
if (uioinfo->handler || uioinfo->irqcontrol ||
uioinfo->irq_flags & IRQF_SHARED) {
dev_err(&pdev->dev, "interrupt configuration error\n");
return ret;
}
priv = devm_kzalloc(&pdev->dev, sizeof(*priv), GFP_KERNEL);
if (!priv) {
dev_err(&pdev->dev, "unable to kmalloc\n");
return -ENOMEM;
}
priv->uioinfo = uioinfo;
spin_lock_init(&priv->lock);
priv->flags = 0; /* interrupt is enabled to begin with */
priv->pdev = pdev;
if (!uioinfo->irq) {
ret = platform_get_irq(pdev, 0);
uioinfo->irq = ret;
if (ret == -ENXIO && pdev->dev.of_node)
uioinfo->irq = UIO_IRQ_NONE;
else if (ret < 0) {
dev_err(&pdev->dev, "failed to get IRQ\n");
return ret;
}
}
uiomem = &uioinfo->mem[0];
for (i = 0; i < pdev->num_resources; ++i) {
struct resource *r = &pdev->resource[i];
if (r->flags != IORESOURCE_MEM)
continue;
if (uiomem >= &uioinfo->mem[MAX_UIO_MAPS]) {
dev_warn(&pdev->dev, "device has more than "
__stringify(MAX_UIO_MAPS)
" I/O memory resources.\n");
break;
}
uiomem->memtype = UIO_MEM_PHYS;
uiomem->addr = r->start;
uiomem->size = resource_size(r);
uiomem->name = r->name;
++uiomem;
}
while (uiomem < &uioinfo->mem[MAX_UIO_MAPS]) {
uiomem->size = 0;
++uiomem;
}
/* This driver requires no hardware specific kernel code to handle
* interrupts. Instead, the interrupt handler simply disables the
* interrupt in the interrupt controller. User space is responsible
* for performing hardware specific acknowledge and re-enabling of
* the interrupt in the interrupt controller.
*
* Interrupt sharing is not supported.
*/
uioinfo->handler = uio_pdrv_genirq_handler;
uioinfo->irqcontrol = uio_pdrv_genirq_irqcontrol;
uioinfo->open = uio_pdrv_genirq_open;
uioinfo->release = uio_pdrv_genirq_release;
uioinfo->priv = priv;
/* Enable Runtime PM for this device:
* The device starts in suspended state to allow the hardware to be
* turned off by default. The Runtime PM bus code should power on the
* hardware and enable clocks at open().
*/
pm_runtime_enable(&pdev->dev);
ret = uio_register_device(&pdev->dev, priv->uioinfo);
if (ret) {
dev_err(&pdev->dev, "unable to register uio device\n");
pm_runtime_disable(&pdev->dev);
return ret;
}
platform_set_drvdata(pdev, priv);
return 0;
}
static int uio_pdrv_genirq_remove(struct platform_device *pdev)
{
struct uio_pdrv_genirq_platdata *priv = platform_get_drvdata(pdev);
uio_unregister_device(priv->uioinfo);
pm_runtime_disable(&pdev->dev);
priv->uioinfo->handler = NULL;
priv->uioinfo->irqcontrol = NULL;
return 0;
}
static int uio_pdrv_genirq_runtime_nop(struct device *dev)
{
/* Runtime PM callback shared between ->runtime_suspend()
* and ->runtime_resume(). Simply returns success.
*
* In this driver pm_runtime_get_sync() and pm_runtime_put_sync()
* are used at open() and release() time. This allows the
* Runtime PM code to turn off power to the device while the
* device is unused, ie before open() and after release().
*
* This Runtime PM callback does not need to save or restore
* any registers since user space is responsbile for hardware
* register reinitialization after open().
*/
return 0;
}
static const struct dev_pm_ops uio_pdrv_genirq_dev_pm_ops = {
.runtime_suspend = uio_pdrv_genirq_runtime_nop,
.runtime_resume = uio_pdrv_genirq_runtime_nop,
};
#ifdef CONFIG_OF
static struct of_device_id uio_of_genirq_match[] = {
{ /* This is filled with module_parm */ },
{ /* Sentinel */ },
};
MODULE_DEVICE_TABLE(of, uio_of_genirq_match);
module_param_string(of_id, uio_of_genirq_match[0].compatible, 128, 0);
MODULE_PARM_DESC(of_id, "Openfirmware id of the device to be handled by uio");
#endif
static struct platform_driver uio_pdrv_genirq = {
.probe = uio_pdrv_genirq_probe,
.remove = uio_pdrv_genirq_remove,
.driver = {
.name = DRIVER_NAME,
.pm = &uio_pdrv_genirq_dev_pm_ops,
.of_match_table = of_match_ptr(uio_of_genirq_match),
},
};
module_platform_driver(uio_pdrv_genirq);
MODULE_AUTHOR("Magnus Damm");
MODULE_DESCRIPTION("Userspace I/O platform driver with generic IRQ handling");
MODULE_LICENSE("GPL v2");
MODULE_ALIAS("platform:" DRIVER_NAME);
7、 一点补充
a)UIO机制中虽然包含四种中断方式(高电平、低电平、上升沿、下降沿),但在zynq中只支持2种(高电平、上升沿),中断方式的配置位于devicetree中,示例如下
Devicetree中大多数设备的interrupts最后参数都是0x4,从cat/proc/interrupts中能看到只有watchdog几个为上升沿触发。
b)使用request_irq申请中断的时候irq的值不是devicetree中设定的值,而是操作系统启动后分配的值,所以在UIO中打印出来irq值不是62-65,而是47-50。通过在irq-gic.c中和uio_pdrv_genirq.c中增加打印信息,发现中断触发时过程如下。
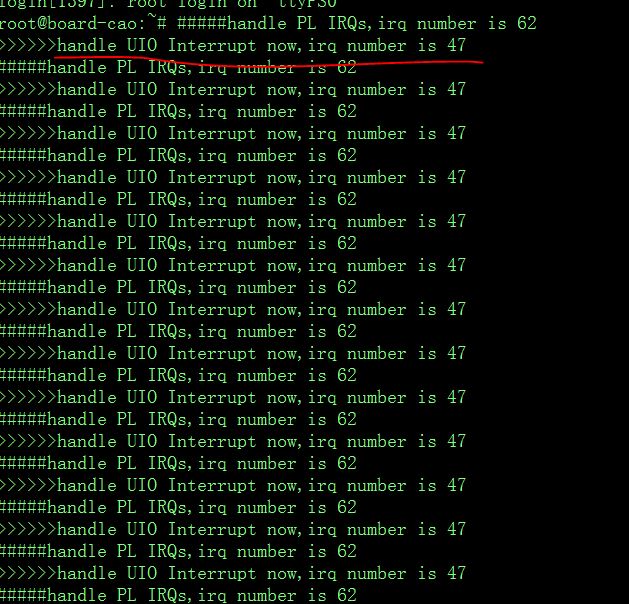
需要注意的是,在gic中该值为62,这和devicetree中设置的一样。而从打印信息能够看到,中断是先送到gic,然后再送给内核,内核再调用uio的中断处理函数。所以如果需要在uio中增加自己的代码处理相应的中断,需要先启动操作系统,确认好每根线对应的中断号才行。
注意:在这个例子中,由于UIO已经注册了47-50号中断,且UIO不支持中断共享,所以其他程序再次注册47-50号中断时会出错。