首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
四旋翼无人机PID控制
其他
2018-05-27 19:30:25
阅读次数: 0
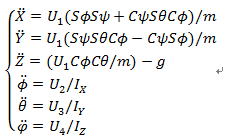
一、建立四旋翼无人机动力学方程
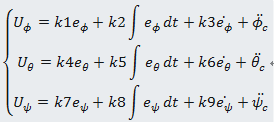
二、确定PID控制律
1、姿态控制回路
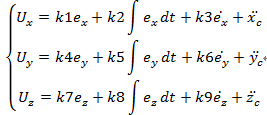
2、位置控制回路
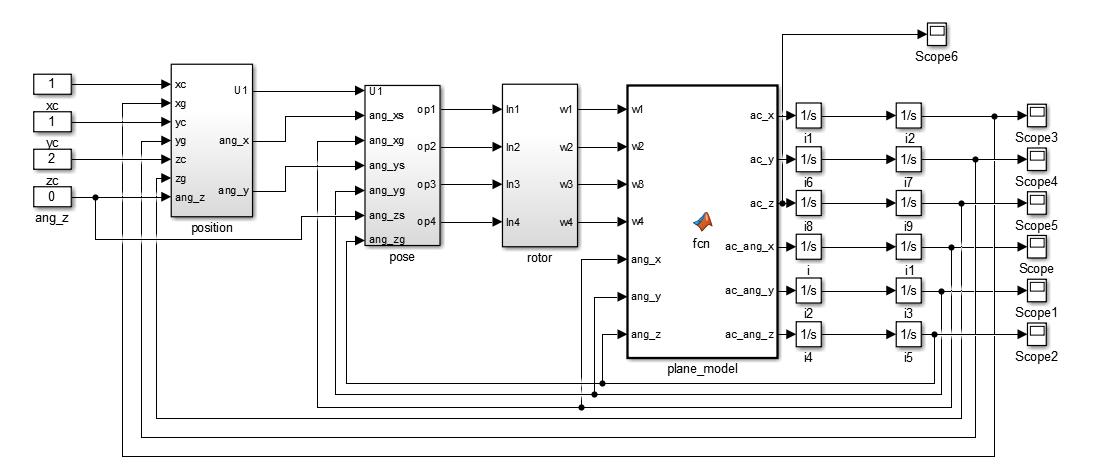
3、仿真图
猜你喜欢
转载自
blog.csdn.net/wangzheweini/article/details/78813942
四旋翼无人机PID控制
m基于PID控制算法的四旋翼无人机飞行控制simulink仿真
【rotors】多旋翼无人机仿真(四)——参数补偿和PID控制
四旋翼无人机从0到1的实现(二十五)无人机工程中PID
【无人机】【2014.12】基于区域覆盖的四旋翼无人机最优路径规划与控制
四旋翼无人机的几何跟踪控制matlab源码
四旋翼无人机的设计与实现讲解
四旋翼无人机设计
“四旋翼”无人机“X模式”飞行原理
四旋翼无人机开发目录
四旋翼无人机使用教程
11.基于STM32C8T6的四旋翼无人机的飞控制作----PID调试方法
多旋翼无人机原理::
4.基于STM32C8T6的四旋翼无人机的飞控制作----理论准备4,四旋翼姿态控制理论
3.基于STM32C8T6的四旋翼无人机的飞控制作----理论准备3,四旋翼姿态控制理论
四旋翼无人机从0到1的实现(二十四)无人机工程中系统控制
m基于内外环PD控制算法的四旋翼无人机飞行控制simulink仿真
技术专栏|多旋翼无人机PID调节经验分享
四旋翼无人机从0到1的实现(十六)无人机MCU驱动→GPIO
四旋翼无人机从0到1的实现(十五)无人机外设驱动→Receiver
四旋翼无人机从0到1的实现(十三)无人机MCU驱动→I2C
四旋翼无人机从0到1的实现(十二)无人机外设驱动→MOTOR
笔记:四旋翼无人机从0到1的实现(十一)无人机MCU驱动→PWM
四旋翼无人机从0到1的实现(二十二)无人机工程中滤波
四旋翼无人机从0到1的实现(二十)无人机MCU驱动→SYSTICK
四旋翼无人机从0到1的实现(十九)无人机MCU驱动→ADC
四旋翼无人机从0到1的实现(十八)无人机外设驱动→MPU6500
四旋翼无人机从0到1的实现(十七)无人机外设驱动→LED
四旋翼无人机从0到1的实现(十四)无人机MCU驱动→UART
【rotors】多旋翼无人机仿真(三)——SE3控制
今日推荐
周排行
LRU cache算法
windows10, 自带的OpenSSH, key权限问题, 文件权限问题
测试用例书写方法
HIVE-默认分隔符的(linux系统的特殊字符)查看,输入和修改
最贵的AMD 7nm显卡来了!这设计 够狂野
java多线程简单demo
[ 转载 ]在Android系统上使用busybox——最简单的方法
QT connect学习
BFSIFT算法分析
Xcode10:library not found for -lstdc++.6.0.9 临时解决
每日归档
更多
2024-08-06(0)
2024-08-05(0)
2024-08-04(0)
2024-08-03(0)
2024-08-02(0)
2024-08-01(0)
2024-07-31(0)
2024-07-30(0)
2024-07-29(0)
2024-07-28(0)