简介
FaceBoxes是一个足够轻量的人脸检测器,由中国科学院自动化研究所和中国科学院大学的研究者提出,旨在实现CPU下的实时人脸检测,FaceBoxes论文是《FaceBoxes: A CPU Real-time Face Detector with High Accuracy》。
FaceBoxes原理
设计理念
FaceBoxes针对模型的效率和检测的效果做了很多设计,效率方面希望检测器足够快,检测效果方面希望有更高的召回率,尤其是针对小脸的情况,基于此:
- 一个下采样足够快的backbone,被命名为Rapidly Digested Convolutional Layers(RDCL);
- 用于检测的层和backbone中都引入多层分支的设计,被命名为Multiple Scale Convolutional Layers(MSCL);
- 使用一种更密集的Anchor策略,提升模型的召回率;
下面详细的说明下这些设计。
网络结构

上图是FaceBoxes的整体结构图,在图中有标明Rapidly Digested Convolutional Layers(RDCL)和Multiple Scale Convolutional Layers(MSCL),其实就是backbone的前后两部分。
- Rapidly Digested Convolutional Layers(RDCL)
所谓的快速消融卷积层,本质上就是计算量要小,下采样要快。对于一个目标检测或人脸检测模型来说,计算量高的很大一部分原因是输入图像尺寸大,图像分类任务中224是一个常用尺寸,而这个尺寸去做检测是几乎不可能的。所以FaceBoxes为了足够快,就在在前几层尽快的完成下采样,把特征图的宽高降下来。在上图RDCL的部分,一共只有四层,两层卷积个两层全连接,但是实现了 倍的下采样,而主干网络最后也只下采样128倍,绝大部分都在前几层完成了。
此外,RDCL中的卷积层并且由于是前两层卷积,可以使用CReLU,就像下图这样。
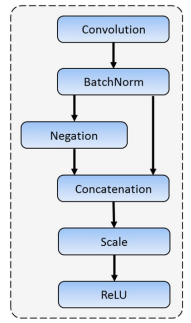
这让前两层卷积输出通道数可以更小,分别是24和64。也正是因为快速消融卷积层的存在,FaceBoxes把输入图像尺寸设置成了 。这个尺寸即便对于目标检测任务来说,都是不算小的。 - Multiple Scale Convolutional Layers(MSCL)
MSCL就是backbone的后半部分,它有两个意思:
1.主干模型中使用了多层卷积,增加模型的宽度,丰富模型的感受野。这其实就是用了inception模块,在结构图上也能看出来,分别是inception1,inception2和inception3。inception模块的细节如下图。
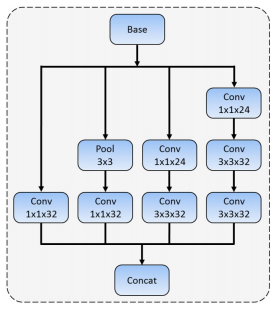
inception3之后,FaceBoxes主干网络还有四层卷积,分别是Conv3_1,Conv3_2,Conv4_1和Conv4_2,卷积核 和 交替使用,完成最后两次下采样。
2.检测中使用了多层分支,这个就像SSD一样,多层分支已经是检测模型的标配了,FaceBoxes一共拉取了三层分支。分别在inception3,Conv3_2和Conv4_2的后面,在 输入的情况下,这三层的宽高也可以算出来,分别是 , 和 ,再使用 的核进行卷积,没有做下采样,最后通道数量分别控制为 , , 。
我们先说下 是什么,FaceBoxes在这里参考了RPN,RPN的两个分支就分别是4和2。输出2因为RPN在做是不是目标的预测,而人脸检测中目标只有人脸一类,所以FaceBoxes的2是在预测是不是人脸。剩下的4边界框的四个值了。
然后还剩下21,1,1三个数,这个和FaceBoxes选取Anchor的策略有关,我们放到下一个部分一起说明。
Anchor选择
FaceBoxes的Anchor选择没有多种比例,因为人脸差不多都接近一个正方形,所以每一层的Archor都是1:1的。尺度上每一层预设不同,在第一层分支上预设了三个尺寸,分别是
,
和
,负责预测图中的小目标。后两层各一个尺度,分别是
和
。
除此之外,FaceBoxes提出了一种Archor密集程度的概念,它通过下面的公式计算:
什么意思呢?密集程度是就是
,
是Anchor的尺寸,
是Anchor间隔。尺寸上面提到过了,而间隔的意思就是说,在当前的特征图上向原图映射,那么特征图上一个点对应原图的区域是多少?
比如inception3这一层的输出特征图,它下采样了32倍了,所以
。那么用尺寸与间隔的比值能反映出这个Anchor的密集程度。
比如第一层分支上尺寸为
的预设Anchor,此时的间隔也是32,在特征图上每一个点生成
Anchor,这样Anchor永远是不会有重叠的,计算得到的
。
按照这个公式,把五个尺寸的
都算出来,分别是1,2,4,4,4。这样就会发现前两个尺寸的Anchor密集程度太低了。而前两个Anchor主要就是做小目标预测的,这样不可避免的会影响小目标的召回率。怎么办?

文中提出了一种让Anchor变得密集的策略,其实就是生成一个Anchor之后,根据需要的数量,平移出来。平移的本质这个Anchor的中心点不再是特征图的那个对应像素点了,就像上图中画出来的那样。
最后为了补齐这个密集度,第一个尺寸的Anchor会变成4倍,第二个尺寸的Anchor会变成2倍,第三、四、五个尺寸Anchor不变,这样一来,上面我们提到的21,1,1这三个数就出来了。1,1就对应第四个和第五个尺寸的Anchor,而
。
损失函数
FaceBoxes的损失函数和RPN是完全一致的,交叉熵+SmoothL1,这个不再重复了。
性能评价

首先是一个在FDDB上的消融实验,分别验证了RDCL,MSCL和Anchor strategy,RDCL是对速度影响最大的因素,所以当只使用RDCL,不使用其余两个的时候,速度是最快的,但是效果也是最差的。
Anchor strategy对于最终的mAP有1%左右的影响。
最后,Faceboxes没有在wider face上的结果,可能是效果太差了吧╮( ̄▽  ̄)╭,而是AFW,PASCAL face和FDDB

