SimRobot
软件位置及打开相关环境
进入bhuman下的Build/Linux/SimRobot/Develop目录,右键打开终端,输入 ./SimRobot, 如图所示:

该软件的环境在bhuman的Config/Scenes目录下,后缀为ros2的文件
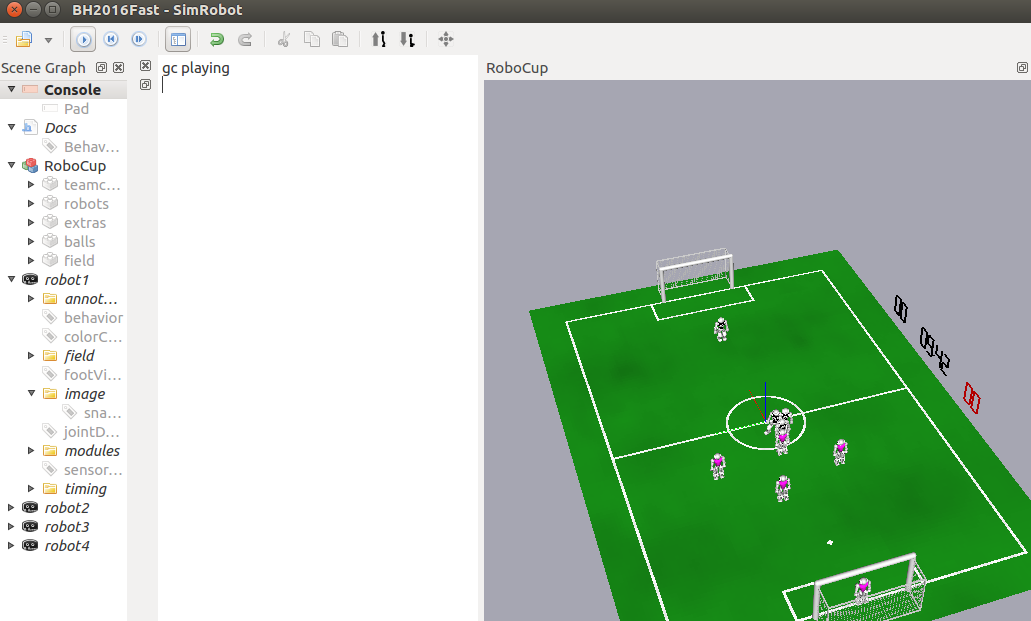
点击SimRobot左上角,打开场景文件,如图所示
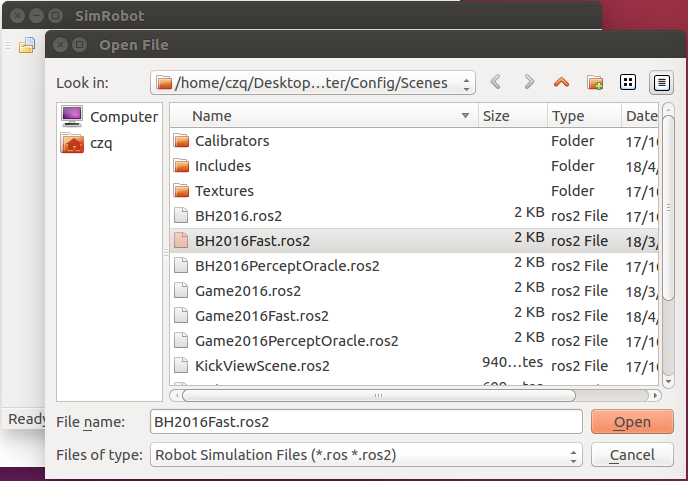
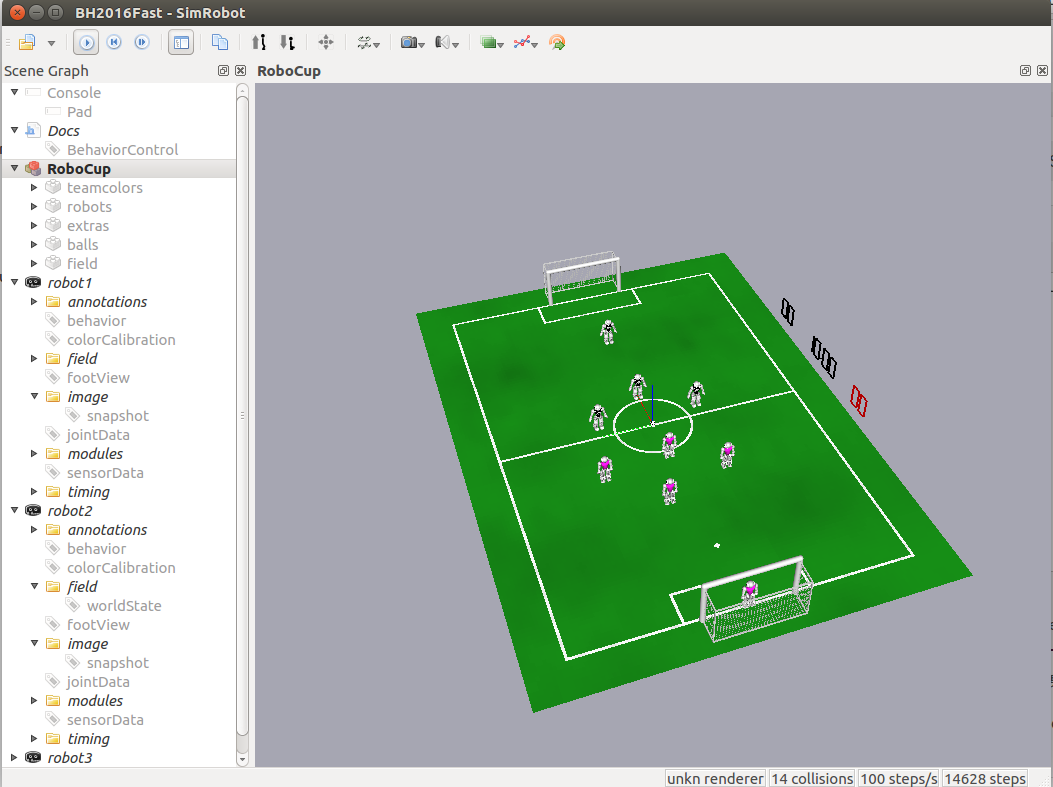
打开后即可进行比赛的模拟
点击菜单栏的Scene Graph按钮。可调出各种子模块
常用功能介绍
该软件的详细功能在这个项目的pdf文件中Tool章节。
环境文件
在Scenes目录下打开ros2文件(该文件属于xml文件)
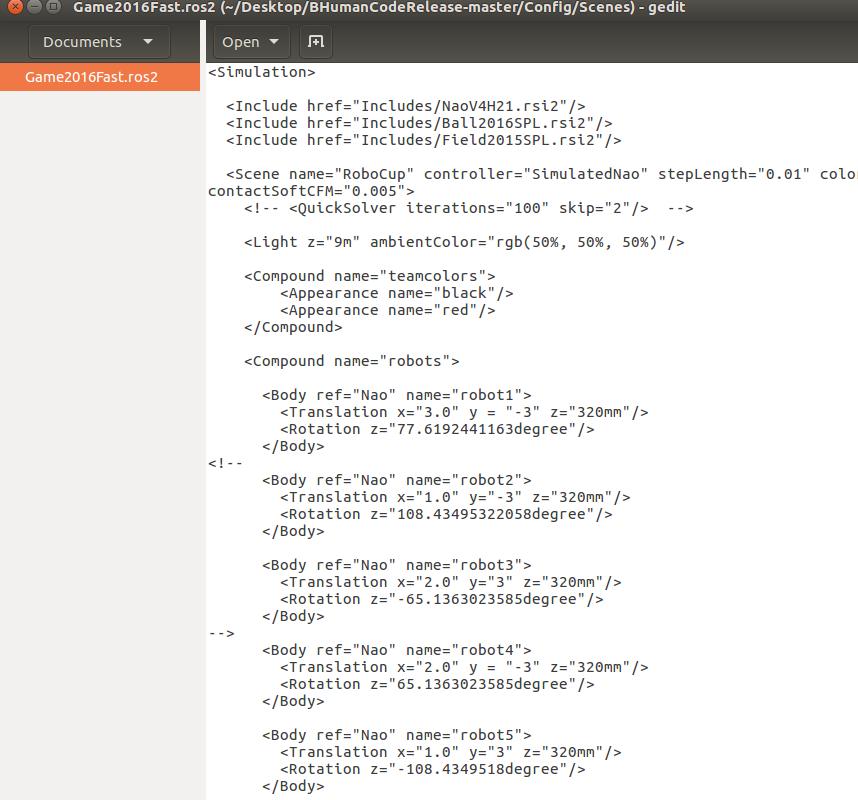
可以作出适当修改,从而改变机器人数目或其他特征,上图中移除了2,3号机器人
控制台
双击Scene Graph的Console即可调出控制台,可以查看机器人的传感器参数及各种状态
两种常用指令
- gc : 该指令控制仿真的游戏状态。例如输入 gc playing后回车,可以在Robocup中看到比赛状态
- vd: 该指令用于查看各机器人的representation等其他参数。
例如输入 vd representation:BallModel 可以查看机器人自己认为的球模型的各种参数,如下图所示

我们可以调用 theBallModel.estimate.position.x() 来获得球相对于机器人的位置,可以在角文件中作为条件判断让机器人作出下一行动
仿真场景
双击Scene Graph中的RoboCup可打开场景模块,就是上面图中的球场部分,配合gc指令检查机器人角色代码部分是否有明显逻辑错误。详细部分参阅pdf文档