效果动图演示
工程的创建
- 新建项目
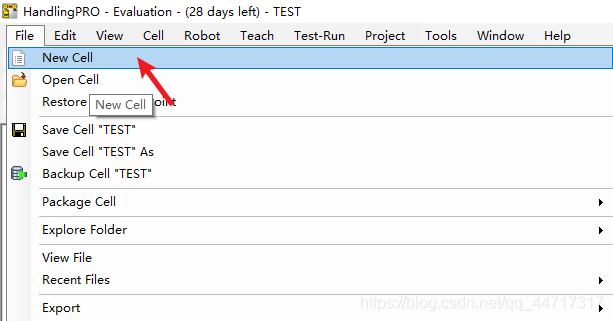
- 选择搬运
HandingPRO

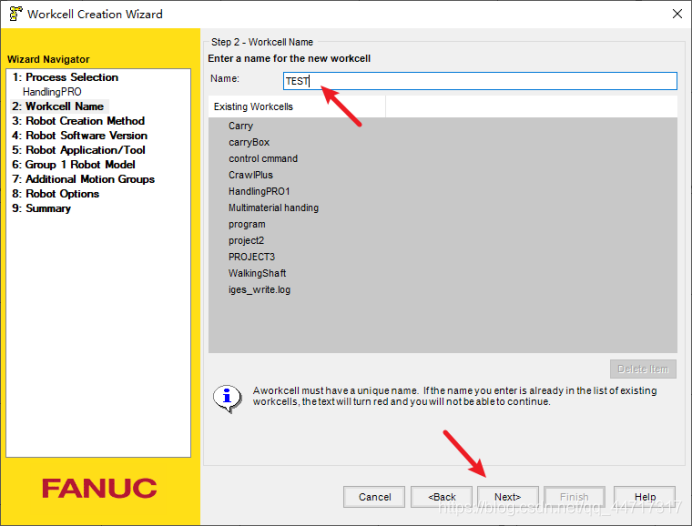
- 设置项目名称
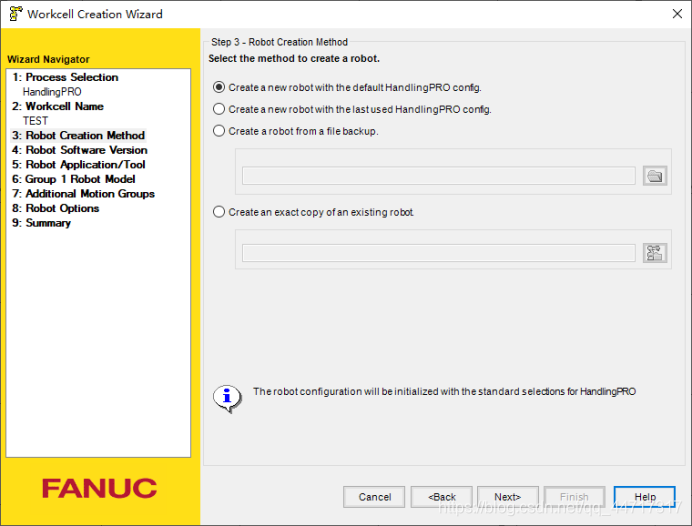
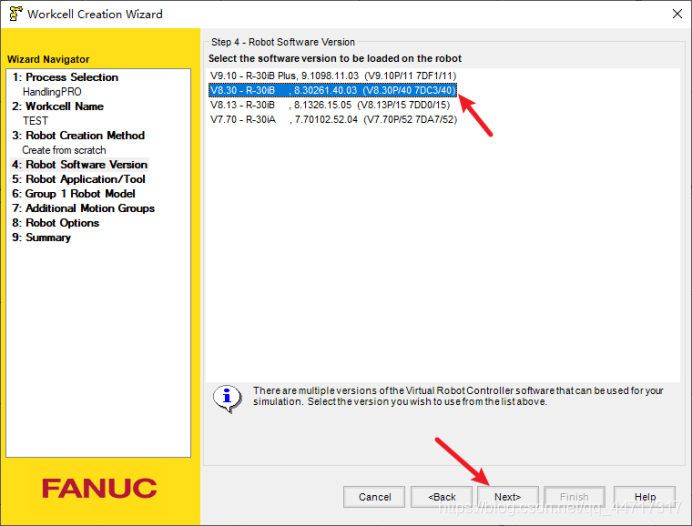
4. 选择控制器版本,这里选择8.3版本
5. 选择HandingTool

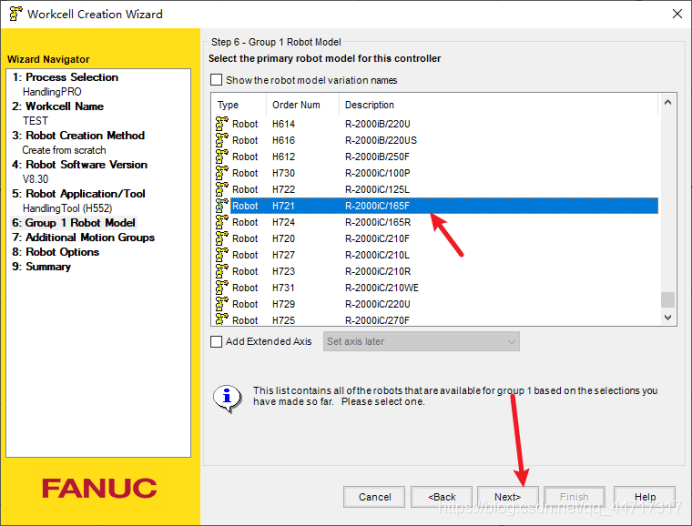
6. 选择机器人型号,这里选择 ROBOT H721
7. 添加一个新的组GROUP2(G2)


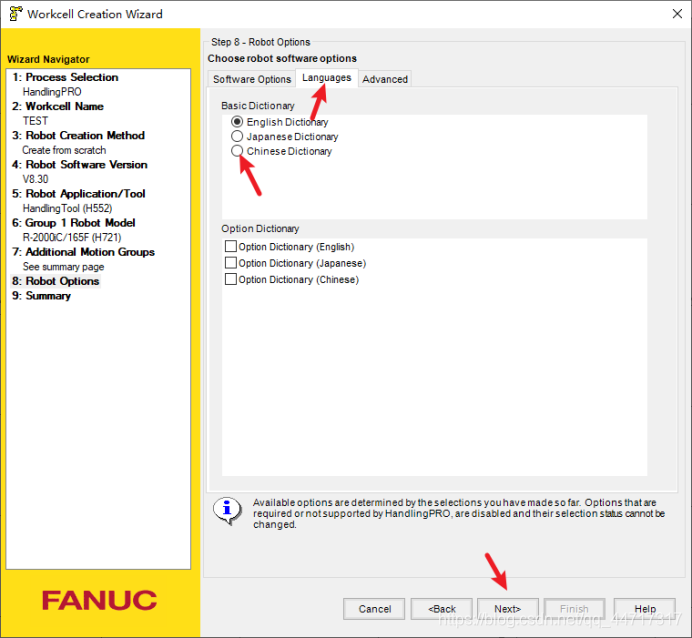
8. 选择中文
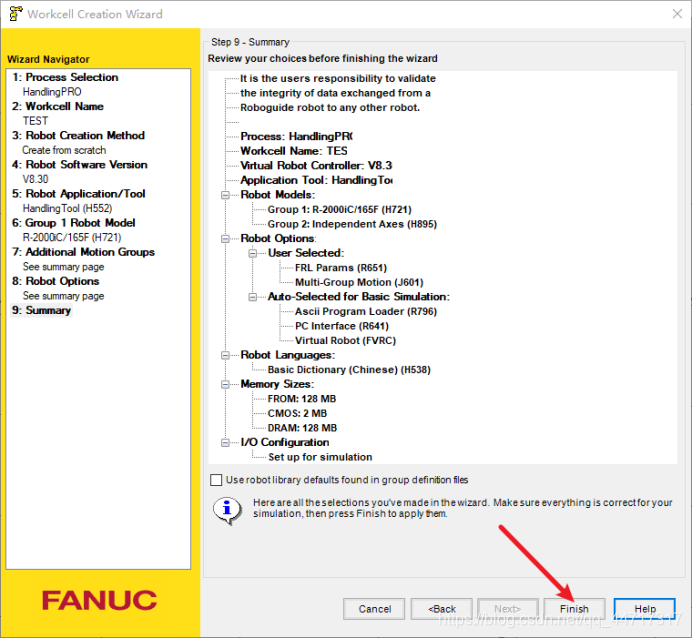
9. 点击Finsh完成创建;
示教器参数设置
- 选择示教器风格 :1

2. 新添加轴的方式选择 这里选择在board1上面 :3

3. 选择开始的有效范围:37

4. 选择增加轴选项:2

5. 选择添加轴的方式 增强版:2

6. 附加轴的伺服电机的种类:62

7. 选择点击类型及电流控制值:2

8. 新加变位机或行走轴的是线性的还是旋转的:1

9. 设置减速比(即电机旋转一周附加周可以增加多少mm(线性),或多少的角度(旋转)):10

10. 建议速度:2

11. 附加轴相对电机的旋转的方向:2

12. 设置附加轴最高限制,即导轨的长度 :6000

13. 设置最低限制:0

14. 输入0点 即坐标原点:0

15. 设置加速时间:2

16. 设置最小加速时间:2

17. 电机负载的载重比:3

18. 设置伺服放大器编号:2

19. 设置伺服放大器类型:2

20. 选择抱闸:1(表示与六个轴相连)

21. 伺服的超时设定:1

22. 伺服电机的关闭时间:30

23. 设置完成,退出;

工作站布局

添加行走轴
- 添加一个machine,这里用一个简单的BOX代替;

- 设置BOX属性,变成如下的长条;

- 将机器人装到machine

- 产生Link,点击编辑,去掉Couple Link CAD选项

- 移动机器人

- 设置电机位置(电机的Z方向必须和机器人导轨的Y方向一致)

定义运动方式与组切换
- 第二个组里从J1开始放:即行走轴的运动方向在第二个组里的J1方向(这里可以尝试选择IO或者伺服电机控制)
- 伺服电机控制

- IO控制

- 使用
FCTN来切换组

