Resnet50的细节讲解
残差神经网络 (ResNet)也是需要掌握的模型,需要自己手动实现理解细节。本文就是对代码的细节讲解,话不多说,开始了。
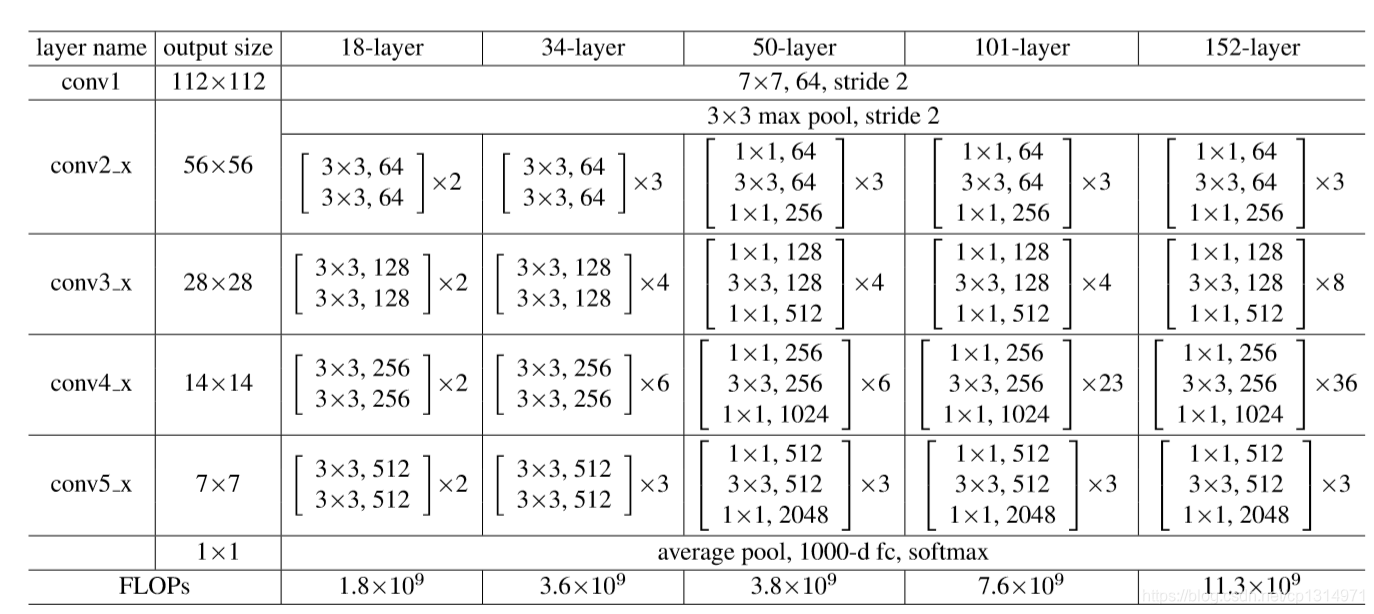
首先你需要了解它的结构,本文以resnet50围绕讲解,网络的输入照片大小是224x224的经过conv1,conv2,conv3,conv4,conv5最后在平均池化,全连接层。由于中间有重复利用的模块,所以我们需要将它们写成一个类,用来重复调用即可。
Resnet之所以能够训练那么深的原因就是它的结构,在不断向后训练的过程中依旧保留浅层特征,我个人的理解,正常情况下经过一次又一次的卷积,浅层的特征逐渐消失,然而Resnet在向后训练的过程中不断的加上前面浅层的特征,这样更加丰富特征的全局性。
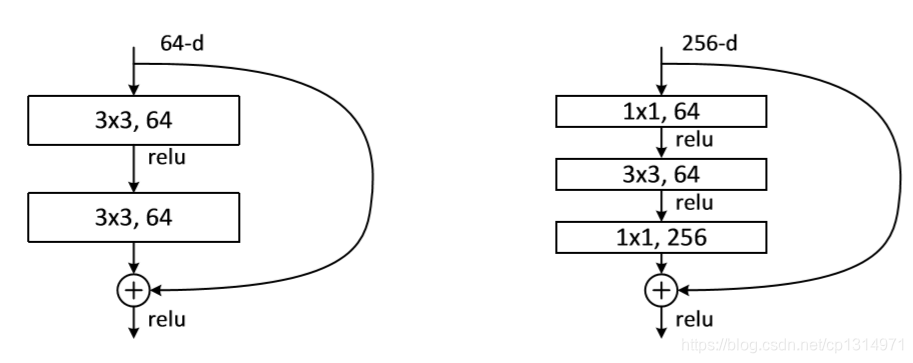
这张图就是我们需要写模块的根据,它们的区别是卷积层数目的不同,我们本文讲解resnet50,所以是以右边的版块为例。先看代码
class Block(nn.Module):
def __init__(self, in_channels, filters, stride=1, is_1x1conv=False):
super(Block, self).__init__()
filter1, filter2, filter3 = filters
self.is_1x1conv = is_1x1conv
self.relu = nn.ReLU(inplace=True)
self.conv1 = nn.Sequential(
nn.Conv2d(in_channels, filter1, kernel_size=1, stride=stride,bias=False),
nn.BatchNorm2d(filter1),
nn.ReLU()
)
self.conv2 = nn.Sequential(
nn.Conv2d(filter1, filter2, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(filter2),
nn.ReLU()
)
self.conv3 = nn.Sequential(
nn.Conv2d(filter2, filter3, kernel_size=1, stride=1, bias=False),
nn.BatchNorm2d(filter3),
)
if is_1x1conv:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, filter3, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(filter3)
)
def forward(self, x):
x_shortcut = x
x = self.conv1(x)
x = self.conv2(x)
x = self.conv3(x)
if self.is_1x1conv:
x_shortcut = self.shortcut(x_shortcut)
x = x + x_shortcut
x = self.relu(x)
return x
我们将其写成一个类,这样多次使用方便。
def __init__(self, in_channels, filters, stride=1, is_1x1conv=False):
in_channels是通道数,filter1, filter2, filter3 = filters这样写的原因是我们对应板块来写,一个板块进行了3次卷积。is_1x1conv=False 这个就是直接将浅层的特征图仅仅经历一次卷积的捷径,正常情况下应该是三次卷积。这里有一点细节就是我在写self.conv3 这个卷积的时候没有加上Relu()函数,主要是这里需要判断这个板块是否激活了self.shortcut,只有加上这个之后才能一起Relu。
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, filter3, kernel_size=1, stride=stride),
nn.BatchNorm2d(filter3)
这段代码就是特征图捷径,浅层特征图就经历一次卷积直接与进行三次卷积之后的特征图相加
def _make_layer(self, in_channels, filters, blocks, stride=1):
layers = []
block_1 = Block(in_channels, filters, stride=stride, is_1x1conv=True)
layers.append(block_1)
for i in range(1, blocks):
layers.append(Block(filters[2], filters, stride=1, is_1x1conv=False))
return nn.Sequential(*layers)
写这个函数就是利用for循环多次使用重复的板块,这里也有一些细节
block_1 = Block(in_channels, filters, stride=stride, is_1x1conv=True)
layers.append(Block(filters[2], filters, stride=1, is_1x1conv=False))
每个板块的第一次卷积和后面的卷积stride的设置是不同的,主要是板块从conv3开始第一次就是进行stride=2的设定,这样经过这层卷积,特征图的大小变为原来的二分之一。
self.conv1 = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64),
nn.ReLU(),
)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.conv2 = self._make_layer(64, (64, 64, 256), Layers[0])
self.conv3 = self._make_layer(256, (128, 128, 512), Layers[1], 2)
self.conv4 = self._make_layer(512, (256, 256, 1024), Layers[2], 2)
self.conv5 = self._make_layer(1024, (512, 512, 2048), Layers[3], 2)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Sequential(
nn.Linear(2048, 1000)
)
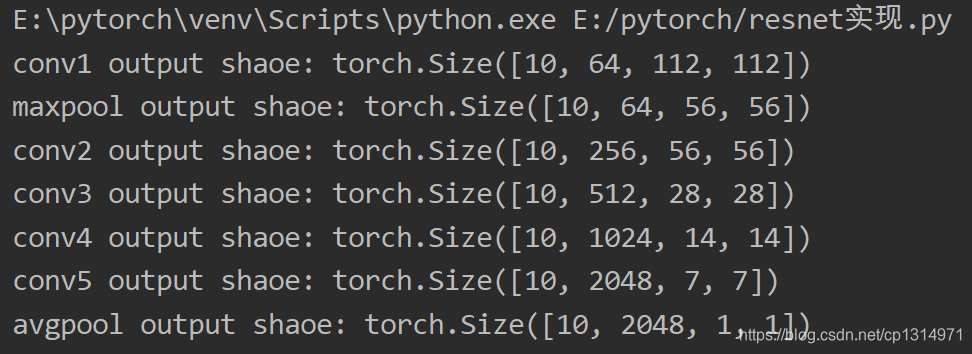
这便是整个resnet50的网络设置了,我在上一篇pytorch实现inception模型有讲到如何计算特征图经过卷积之后的大小。举个例子,输入的图像为224x224的,进过conv1 (224+2x3+1-7)/2 ,公式是(n+2xpadding+1-kernel)/stride.整个的特征图变化如下
self.conv2 = self._make_layer(64, (64, 64, 256), Layers[0])
Layer[0]是我之前提前设置好需要重复的次数。Layers = [3, 4, 6, 3],整个的代码流程是这样的
import torch
import torch.nn as nn
Layers = [3, 4, 6, 3]
class Block(nn.Module):
def __init__(self, in_channels, filters, stride=1, is_1x1conv=False):
super(Block, self).__init__()
filter1, filter2, filter3 = filters
self.is_1x1conv = is_1x1conv
self.relu = nn.ReLU(inplace=True)
self.conv1 = nn.Sequential(
nn.Conv2d(in_channels, filter1, kernel_size=1, stride=stride,bias=False),
nn.BatchNorm2d(filter1),
nn.ReLU()
)
self.conv2 = nn.Sequential(
nn.Conv2d(filter1, filter2, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(filter2),
nn.ReLU()
)
self.conv3 = nn.Sequential(
nn.Conv2d(filter2, filter3, kernel_size=1, stride=1, bias=False),
nn.BatchNorm2d(filter3),
)
if is_1x1conv:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, filter3, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(filter3)
)
def forward(self, x):
x_shortcut = x
x = self.conv1(x)
x = self.conv2(x)
x = self.conv3(x)
if self.is_1x1conv:
x_shortcut = self.shortcut(x_shortcut)
x = x + x_shortcut
x = self.relu(x)
return x
class Resnet50(nn.Module):
def __init__(self):
super(Resnet50,self).__init__()
self.conv1 = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64),
nn.ReLU(),
)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.conv2 = self._make_layer(64, (64, 64, 256), Layers[0])
self.conv3 = self._make_layer(256, (128, 128, 512), Layers[1], 2)
self.conv4 = self._make_layer(512, (256, 256, 1024), Layers[2], 2)
self.conv5 = self._make_layer(1024, (512, 512, 2048), Layers[3], 2)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Sequential(
nn.Linear(2048, 1000)
)
def forward(self, input):
x = self.conv1(input)
x = self.maxpool(x)
x = self.conv2(x)
x = self.conv3(x)
x = self.conv4(x)
x = self.conv5(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.fc(x)
return x
def _make_layer(self, in_channels, filters, blocks, stride=1):
layers = []
block_1 = Block(in_channels, filters, stride=stride, is_1x1conv=True)
layers.append(block_1)
for i in range(1, blocks):
layers.append(Block(filters[2], filters, stride=1, is_1x1conv=False))
return nn.Sequential(*layers)
net = Resnet50()
x = torch.rand((10, 3, 224, 224))
for name,layer in net.named_children():
if name != "fc":
x = layer(x)
print(name, 'output shaoe:', x.shape)
else:
x = x.view(x.size(0), -1)
x = layer(x)
print(name, 'output shaoe:', x.shape)
