- 中斷副程式的宣告
__interrupt void cpu_timer0_isr(void);
進入副程式
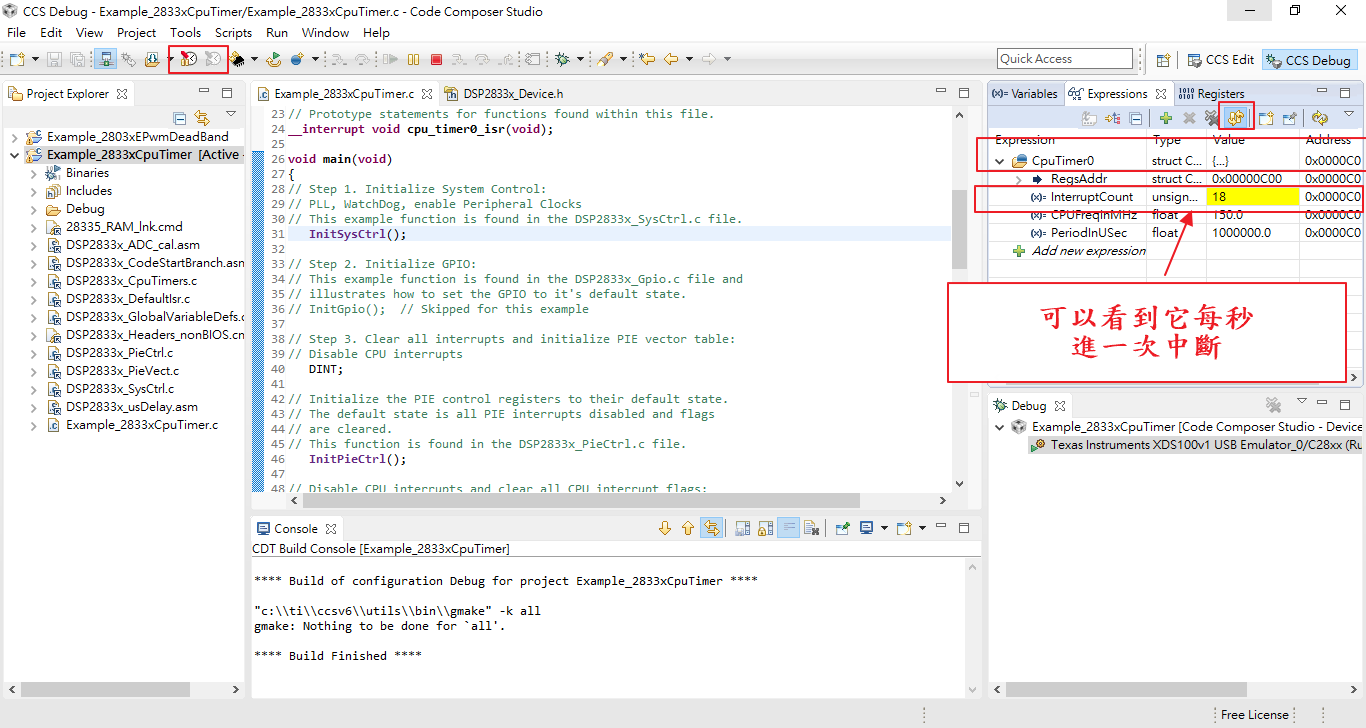
__interrupt void cpu_timer0_isr(void) { CpuTimer0.InterruptCount++; // Acknowledge this interrupt to receive more interrupts from group 1 PieCtrlRegs.PIEACK.all = 1; }
其目的是把 InterruptCount ++
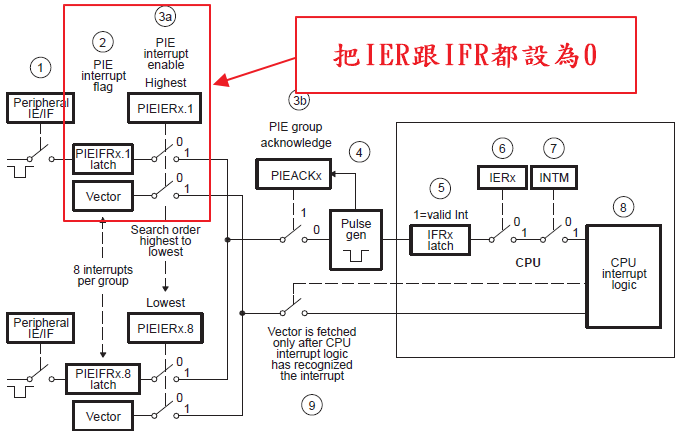
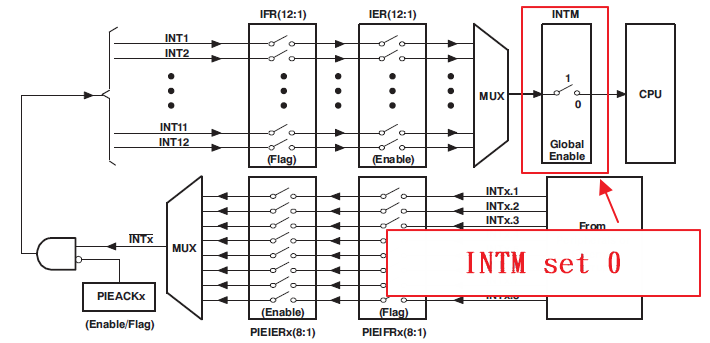
接下來 PIEACK.all = 1來把ACK信號清除(如下圖)
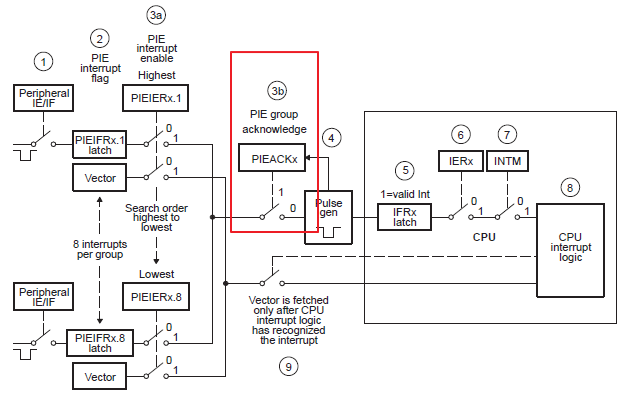
(一定要清除,不然若有其他週邊中斷就無法使用這個cpu中斷)
- 系統初始化
InitSysCtrl();
進入該程式
void InitSysCtrl(void) { DisableDog(); //Disable看門狗計數器 InitPll(DSP28_PLLCR,DSP28_DIVSEL); //初始SYSCLKOUT??幹!!還看不懂 InitPeripheralClocks(); }
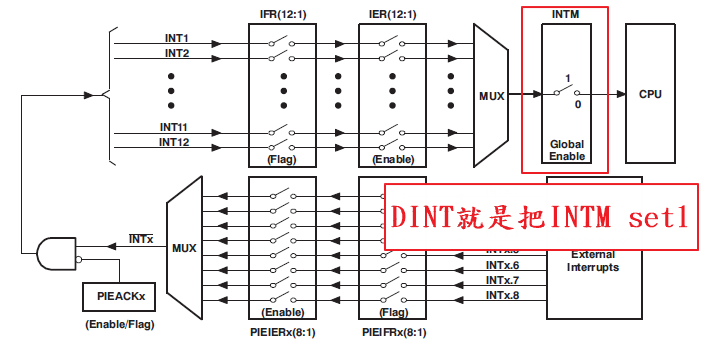
- Disable CPU interrupts
DINT; //中斷Disable
- 初始PIE的控制
InitPieCtrl();
進入該程式
void InitPieCtrl(void) { // // Disable Interrupts at the CPU level DINT;
// Disable the PIE PieCtrlRegs.PIECTRL.bit.ENPIE = 0; // Clear all PIEIER registers PieCtrlRegs.PIEIER1.all = 0; PieCtrlRegs.PIEIER2.all = 0; PieCtrlRegs.PIEIER3.all = 0; PieCtrlRegs.PIEIER4.all = 0; PieCtrlRegs.PIEIER5.all = 0; PieCtrlRegs.PIEIER6.all = 0; PieCtrlRegs.PIEIER7.all = 0; PieCtrlRegs.PIEIER8.all = 0; PieCtrlRegs.PIEIER9.all = 0; PieCtrlRegs.PIEIER10.all = 0; PieCtrlRegs.PIEIER11.all = 0; PieCtrlRegs.PIEIER12.all = 0; // Clear all PIEIFR registers
PieCtrlRegs.PIEIFR1.all = 0; PieCtrlRegs.PIEIFR2.all = 0; PieCtrlRegs.PIEIFR3.all = 0; PieCtrlRegs.PIEIFR4.all = 0; PieCtrlRegs.PIEIFR5.all = 0; PieCtrlRegs.PIEIFR6.all = 0; PieCtrlRegs.PIEIFR7.all = 0; PieCtrlRegs.PIEIFR8.all = 0; PieCtrlRegs.PIEIFR9.all = 0; PieCtrlRegs.PIEIFR10.all = 0; PieCtrlRegs.PIEIFR11.all = 0; PieCtrlRegs.PIEIFR12.all = 0; }
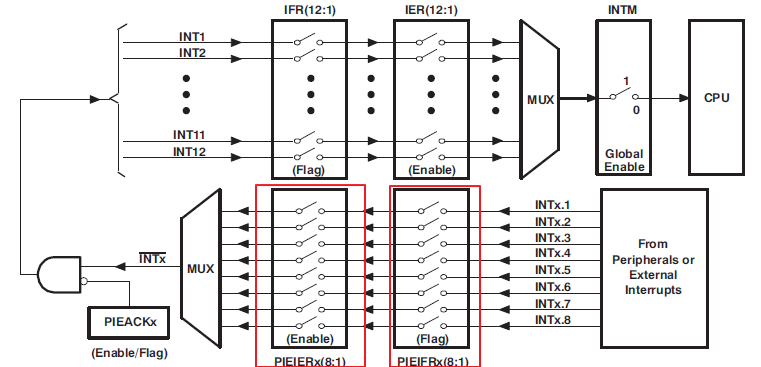
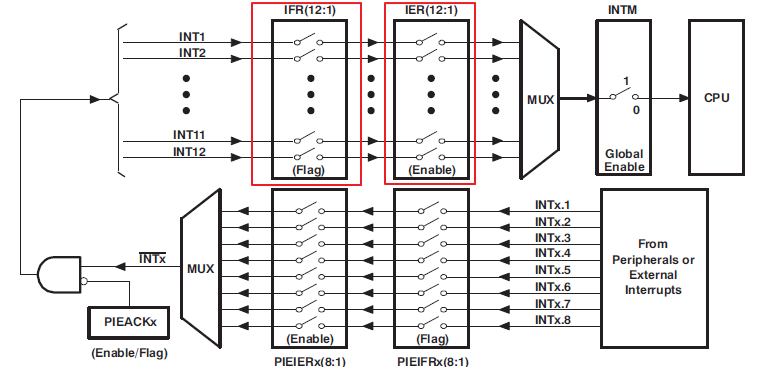
把所有的PIEIER跟PIEIFR的旗標寫成0 (如下圖參考)
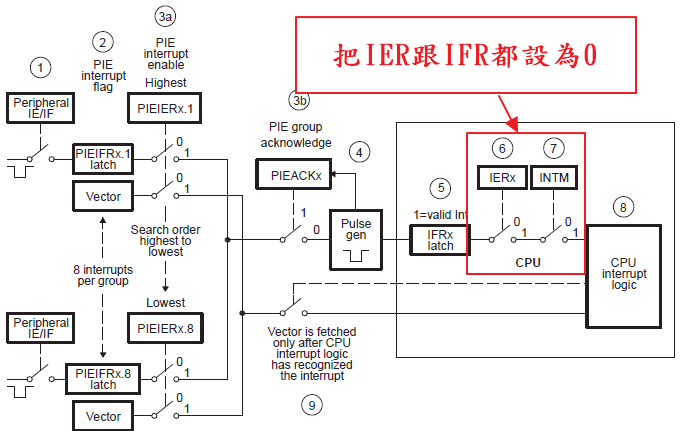
- Disable CPU interrupts and clear all CPU interrupt flags:
IER = 0x0000; IFR = 0x0000;
- 初始化PIE向量表
InitPieVectTable();
- 將中斷服務程式對應到PIE中斷向量表來啟動相對應的服務
EALLOW; // 解除暫存器保護(有的暫存器要解開保護才能寫入) PieVectTable.TINT0 = &cpu_timer0_isr; EDIS; // 讓暫存器進入保護
- 初始CPU Timers
InitCpuTimers();
進入
void InitCpuTimers(void) { // // CPU Timer 0 - 初始化地址指針到各自的定時器寄存器 // CpuTimer0.RegsAddr = &CpuTimer0Regs; // // Initialize timer period to maximum(設為最大值) // CpuTimer0Regs.PRD.all = 0xFFFFFFFF; // // Initialize pre-scale counter to divide by 1 (SYSCLKOUT) // CpuTimer0Regs.TPR.all = 0; CpuTimer0Regs.TPRH.all = 0; // // 初始時,把計時器先停止 TSS=1 為停止 // CpuTimer0Regs.TCR.bit.TSS = 1; // // 初始時,要重載計時器暫存器的暫存值 // CpuTimer0Regs.TCR.bit.TRB = 1; // // 重置中斷計數器 // CpuTimer0.InterruptCount = 0;
- 設定CPU時間
ConfigCpuTimer(&CpuTimer0, 150, 1000000); //150=>SYSCLKOUT 100000=M=10^6
進入
void ConfigCpuTimer(struct CPUTIMER_VARS *Timer, float Freq, float Period) { Uint32 temp; // // Initialize timer period // Timer->CPUFreqInMHz = Freq; Timer->PeriodInUSec = Period; temp = (long) (Freq * Period); Timer->RegsAddr->PRD.all = temp; //timer period to 150MHZ => 設為150*10^6 // // Set pre-scale counter to divide by 1 (SYSCLKOUT) (設為一秒鐘 (為什麼是1S???還要再確認一下)) // Timer->RegsAddr->TPR.all = 0; //除頻因子 Timer->RegsAddr->TPRH.all = 0; //除頻因子 (TPRH:TPR+1=>0+1=1 故SYSCLKOUT/1=原本) // // Initialize timer control register // // // 1 = Stop timer, 0 = Start/Restart Timer // Timer->RegsAddr->TCR.bit.TSS = 1; //TSS=1 Disable Timer->RegsAddr->TCR.bit.TRB = 1; // 1 = reload timer 重新仔入 Timer->RegsAddr->TCR.bit.SOFT = 1; Timer->RegsAddr->TCR.bit.FREE = 1; // Timer Free Run // // 0 = Disable/ 1 = Enable Timer Interrupt 計時器中斷Enable // Timer->RegsAddr->TCR.bit.TIE = 1; // // Reset interrupt counter (清除觀測變數) // Timer->InterruptCount = 0; }
- 把TSS設為0來啟動Timer
CpuTimer0Regs.TCR.all = 0x4000;
(所以前面要先TSS設為1讓Timer先不跑,再把暫存器設定完成,最後再把TSS開啟)
- Enable CPU Timer 0
IER |= M_INT1;
- 啟動PIE的INT1.7
PieCtrlRegs.PIEIER1.bit.INTx7 = 1;
可對照下圖得知把中斷向量
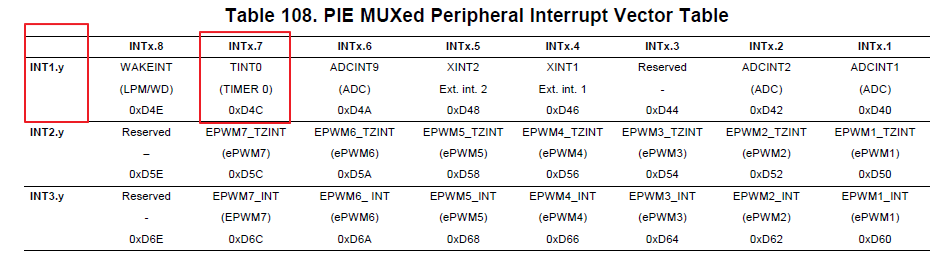
可看出INT1.7為 Timer 0 故要啟動它
- 最後步驟
// Enable global Interrupts and higher priority real-time debug events: EINT; // Enable Global interrupt INTM=0 ERTM; // Enable Global realtime interrupt DBGM(啟動中斷在即時粉真模式下(CPU暫停) ??靠北 也看不懂) // Step 6. IDLE loop. Just sit and loop forever (optional): for(;;);
- 最後附上全部程式碼 (PS:有偷偷把Timer1&2先砍掉)
#include "DSP28x_Project.h" // Device Headerfile and Examples Include File // Prototype statements for functions found within this file. __interrupt void cpu_timer0_isr(void); void main(void) { // Step 1. Initialize System Control: // PLL, WatchDog, enable Peripheral Clocks // This example function is found in the DSP2833x_SysCtrl.c file. InitSysCtrl(); // Step 2. Initialize GPIO: // This example function is found in the DSP2833x_Gpio.c file and // illustrates how to set the GPIO to it's default state. // InitGpio(); // Skipped for this example // Step 3. Clear all interrupts and initialize PIE vector table: // Disable CPU interrupts DINT; // Initialize the PIE control registers to their default state. // The default state is all PIE interrupts disabled and flags // are cleared. // This function is found in the DSP2833x_PieCtrl.c file. InitPieCtrl(); // Disable CPU interrupts and clear all CPU interrupt flags: IER = 0x0000; IFR = 0x0000; // Initialize the PIE vector table with pointers to the shell Interrupt // Service Routines (ISR). // This will populate the entire table, even if the interrupt // is not used in this example. This is useful for debug purposes. // The shell ISR routines are found in DSP2833x_DefaultIsr.c. // This function is found in DSP2833x_PieVect.c. InitPieVectTable(); // Interrupts that are used in this example are re-mapped to // ISR functions found within this file. EALLOW; // This is needed to write to EALLOW protected registers PieVectTable.TINT0 = &cpu_timer0_isr; EDIS; // This is needed to disable write to EALLOW protected registers // Step 4. Initialize the Device Peripheral. This function can be // found in DSP2833x_CpuTimers.c InitCpuTimers(); // For this example, only initialize the Cpu Timers #if (CPU_FRQ_150MHZ) // Configure CPU-Timer 0, 1, and 2 to interrupt every second: // 150MHz CPU Freq, 1 second Period (in uSeconds) ConfigCpuTimer(&CpuTimer0, 150, 1000000); #endif // To ensure precise timing, use write-only instructions to write to the entire register. Therefore, if any // of the configuration bits are changed in ConfigCpuTimer and InitCpuTimers (in DSP2833x_CpuTimers.h), the // below settings must also be updated. CpuTimer0Regs.TCR.all = 0x4000; // Use write-only instruction to set TSS bit = 0 // Step 5. User specific code, enable interrupts: // Enable CPU int1 which is connected to CPU-Timer 0, CPU int13 // which is connected to CPU-Timer 1, and CPU int 14, which is connected // to CPU-Timer 2: IER |= M_INT1; IER |= M_INT13; IER |= M_INT14; // Enable TINT0 in the PIE: Group 1 interrupt 7 PieCtrlRegs.PIEIER1.bit.INTx7 = 1; // Enable global Interrupts and higher priority real-time debug events: EINT; // Enable Global interrupt INTM ERTM; // Enable Global realtime interrupt DBGM // Step 6. IDLE loop. Just sit and loop forever (optional): for(;;); } __interrupt void cpu_timer0_isr(void) { CpuTimer0.InterruptCount++; // Acknowledge this interrupt to receive more interrupts from group 1 PieCtrlRegs.PIEACK.all = 1; } //=========================================================================== // No more. //===========================================================================