学习双目视觉总是对一些概念模糊不清,例如稀疏匹配和稠密匹配,今天来总结一下。
稀疏匹配
基于特征(点、线)的匹配称作稀疏匹配。
在立体图像对中识别兴趣点而后在两幅图像中匹配相对应的点。
识别兴趣点
在图像中具有很大变化的区域内寻找兴趣点
在以某一点为中心的窗函数中,计算其在不同方向上的变化量
为避免将多个相邻点选为同一特征对应的兴趣点,将特征点选在兴趣测度函数具有局部最大值的地方。


稀疏匹配特点
基于特征的立体匹配算法产生对应于图像特征点的场景稀疏深度图
仅仅能恢复用于求解共轭对的像素子集对应的特征点深度。
要想得到其他点的深度,必须通过使用有关计算方法来估计,如内插值技术。
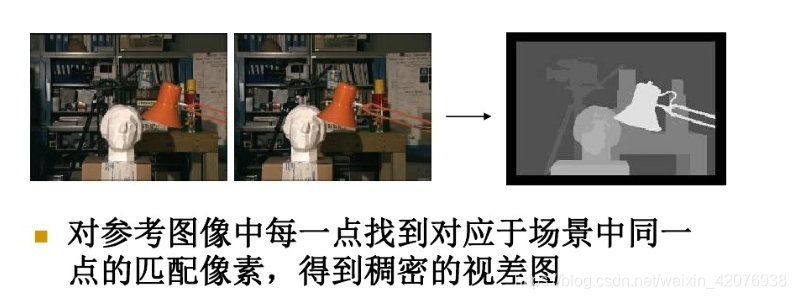
基于区域相关性的立体匹配(稠密)
计算一幅图像的一个小窗口函数 内的像素与另一幅图像中具有同样的潜在对应特征的大小窗函数的像素之间的相关值,具有最大相关性的小窗口区域就是对应区域。
只有满足外极线约束的区域才能是匹配区域。
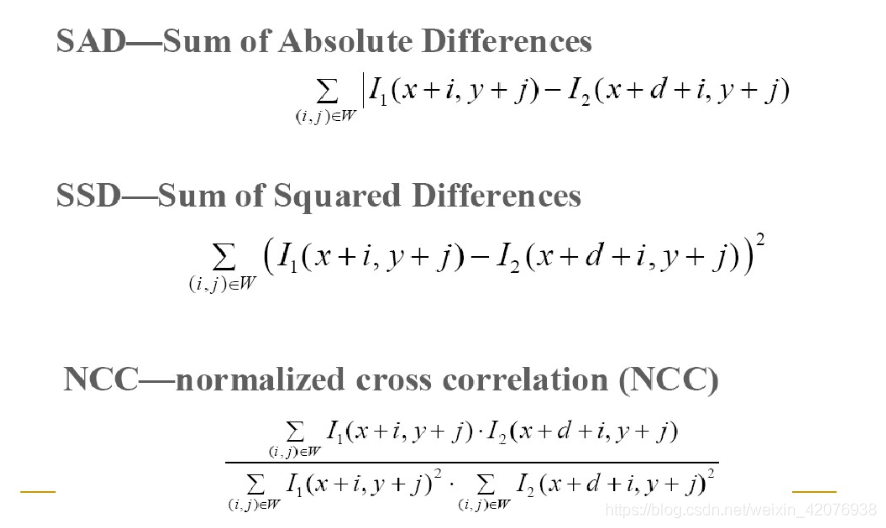
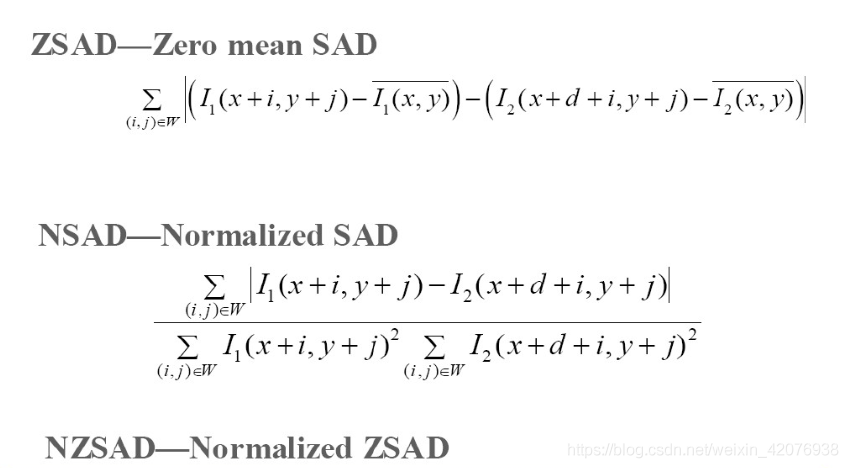
立体评价函数
算法评估