对象的内存分布
hotspot虚拟机中,对象在内存中的布局可以分为三个区域,对象头、实例数据、对齐填充。
对象头
hotspot虚拟机的对象头包括两部分信息,一部分用于存储对象自身的运行时数据(被称为Mark Word),如hash码,GC分代年龄,锁状态标志,偏向线程ID,偏向时间戳等。这部分在32位和64位虚拟机(未开启压缩指针)中占32位和64位。虽然对象在运行时的数据很多,远远超过32或64位,但是对象头信息是对象自身定义的数据无关的额外存储成本,考虑到虚拟机的空间效率,Mark Word被设计成一个变长的数据结构,它会根据状态复用自身的存储空间。
下面是对象头的图示:
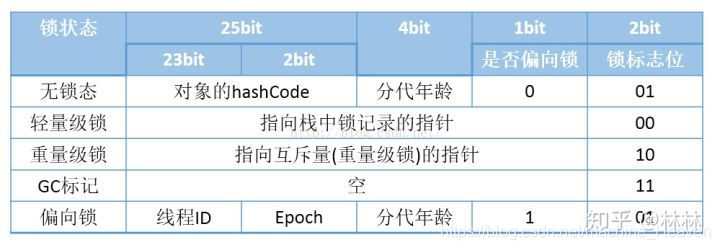
对象头的另一部分是类型指针,即对象指向它的类元数据(1.8以后方法区叫类元空间)的指针,虚拟机通过这个指针来确定这个对象是哪个类的实例。但是并不是所有的虚拟机实现都必须保留类型指针,这取决于虚拟机对象访问定位的方法。如果是一个数组对象,那么对象头必须有一块用于记录数组长度。
实例数据
这一部分就是存储对象真正存储的有效信息,也就是程序代码中定义的各种类型字段的内容。这里的存储顺序受虚拟机分配策略的影响,hotspot中是相同字宽的数据分配到一起。
对齐填充
这一部分并不是必须的,仅仅起一个占位符的作用。原因是hotspot内存管理系统要求对象的起始地址必须是8字节的整数倍,而对象头正好是8字节的整数倍。所以当实例数据没有对齐时候,就需要通过对齐填充补齐。
对象的访问定位
简单说一下对象的访问定位,因为引用类型java虚拟机中只是规定了一个指向对象的引用,并没有说明这个引用怎么去定位。存在两种主流的访问方式,一种通过句柄访问,一种通过直接指针。
句柄 :此时java在堆中划分一块内存作为句柄池,reference中存放对象的句柄池地址,而句柄包含了对象实例数据和类型数据的具体地址。
直接地址:此时reference类型存放的就是对象地址。(这就是hotspot的类型指针)
使用句柄的好处就是,对象移动时只会影响句柄中的实例数据指针,而引用本身不需要改变。因为引用存放的是稳定的句柄地址。
使用直接指针的好处就是,节省了一次指针定位的时间开销,而java中对象的访问是十分频繁的,所以这方面开销积少成多后也是不小的执行成本。
对象的创建
1、类加载检查
1、检查常量池中能否定位到一个类的符号引用
2、检查这个符号引用代表的类是否已经被加载、解析、初始化过了;如果没有执行类的加载过程。
2、内存分配
前提,对象所需内存大下在类加载完之后便可以完全确定。
方式一:指针碰撞
这种情况下,内存需要是完全规整的,即所有用过的内存放到一边,没有用过的内存放到另一边,中间放着一个指针作为分界点的指示器,那么这样分配内存时,仅仅需要把指针挪动对象大小的距离即可。
因此,在使用Serial,ParNew等带有compact(整理)过程的收集器时,使用指针碰撞方式。
方式二:空闲列表
虚拟机维护一个列表,记录哪些内存是可用的,分配时找到一块足够大的空闲空间划分给对象,并更新列表上的记录。
因此,在使用CMS这样的带有Mark—Sweep算法的收集器时,使用空闲列表的方式。
注:线程安全问题
对象的创建在虚拟机中是很频繁的操作,所以仅仅是修改一个指针所指向的位置,在并发情况下并不是线程安全的。有可能对象A正在分配内存,指针还没来的及修改,对象B同时使用并修改了原来的指针来分配内存。有两种解决方案:
方案一:对分配动作同步处理
采用CAS+失败重试的方式保证更新的原子性
方案二:将分配动作划分到不同空间
对每个线程预先分配一小块内存,称为本地线程分配缓冲(Thread Local Allocation Buffer,TLAB)。哪个线程需要分配内存,就在哪个TLAB上分配,只有需要重新分配TLAB时才需要同步锁定。
开启参数-XX:+/UseTLAB
3、初始化为零值
将分配到的空间都初始化为零值(不包括对象头)
1、保证了对象的实例字段,在java代码中不用赋初始值,也可以使用,程序可以看到对应的零值。
2、如果使用TLAB,这一步也可以提前至TLAB分配时进行。
4、必要的设置
比如指明这个对象是哪个类的实例,如何才能找到类的元数据信息,hashcode,GC分代年龄等。根据虚拟机运行状态的不同,对象头会有不同的设置。
5、执行init方法
上面的工作都完成以后,从虚拟机的角度来看,一个对象已经产生了,但从java程序的角度来看,这只是一个半成品-----init方法还没执行,所有字段都是零值。所以一般来说,执行new指令接着会执行init方法,将字段值按照给定的要求初始化为想要的值。
注:java中对象的分配不一定全部发生在堆上,也可能在栈上分配(开启逃逸分析)。有关于这方面给大家分享几个博客作为参考
java栈分配和TLAB
对象都是在堆上分配的吗?
JVM之内存分配,栈分配与TLAB – 03