火龙果(redpitaya)开发板常用接口C语言开发指南(十二)——IIC通信详解(持续更新中)
——本人为《火龙果实战指南——搭建基于Zynq处理器的测量仪器与创新实践平台》一书的作者之一,为了便于各位快速上手火龙果开发板,现提供部分实战指南,包含环境配置、源码、效果等,供大家学习交流使用。
IIC通信
IIC简介
I2C(IIC,Inter-Integrated Circuit)——两线式串行总线,由PHILIPS公司开发用于连接微控制器及其外围设备,采用半双工通信方式。
它是由数据线SDA和时钟SCL构成的串行总线,可发送和接收数据。在CPU与被控IC之间、IC与IC之间进行双向传送,高速IIC总线一般可达400kbps以上。
I2C协议详解
- 1.空闲状态
I2C总线的SDA和SCL两条信号线同时处于高电平时,规定为总线的空闲状态。此时各个器件的输出级场效应管均处在截止状态,即释放总线,由两条信号线各自的上拉电阻把电平拉高。- 2.起始信号与停止信号
起始信号:当SCL为高期间,SDA由高到低的跳变;启动信号是一种电平跳变时序信号,而不是一个电平信号。
停止信号:当SCL为高期间,SDA由低到高的跳变;停止信号也是一种电平跳变时序信号,而不是一个电平信号,如图1所示。
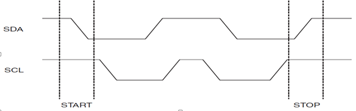
图1 起始信号与停止信号 - 3.应答信号ACK
发送器每发送一个字节,就在时钟脉冲9期间释放数据线,由接收器反馈一个应答信号。 应答信号为低电平时,规定为有效应答位(ACK简称应答位),表示接收器已经成功地接收了该字节;应答信号为高电平时,规定为非应答位(NACK),一般表示接收器接收该字节没有成功。
对于反馈有效应答位ACK的要求是,接收器在第9个时钟脉冲之前的低电平期间将SDA线拉低,并且确保在该时钟的高电平期间为稳定的低电平,如图10-6所示。如果接收器是主控器,则在它收到最后一个字节后,发送一个NACK信号,以通知被控发送器结束数据发送,并释放SDA线,以便主控接收器发送一个停止信号P,如图2所示。
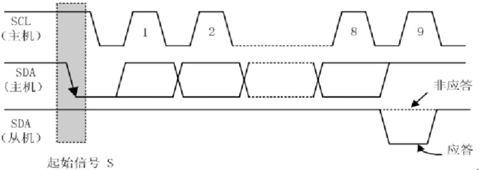
图2 IIC总线的响应 - 4.数据的有效性
I2C总线进行数据传送时,时钟信号为高电平期间,数据线上的数据必须保持稳定,只有在时钟线上的信号为低电平期间,数据线上的高电平或低电平状态才允许变化。即:数据在SCL的上升沿到来之前就需准备好。并在在下降沿到来之前必须稳定,如图3所示。
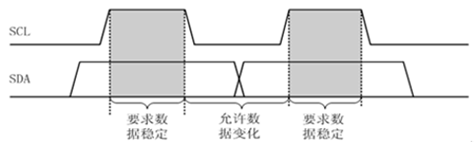
图3 数据有效传输
5.数据的传送
在I2C总线上传送的每一位数据都有一个时钟脉冲相对应(或同步控制),即在SCL串行时钟的配合下,在SDA上逐位地串行传送每一位数据。数据位的传输是边沿触发。
- 2.起始信号与停止信号
IIC读取EEPROM内存数据
EEPROM是一种掉电后数据不丢失的存储芯片,存储数据可靠不易失。本节将展示red pitaya开发板源码官网提供的通过IIC从EEPROM读取、写入信息代码,EEPROM作为red pitaya提供的储存媒介,便于将采集的数据进行保存,有很强的实用性,是必须掌握的模块之一。
连接开发板并在项目文件夹redpitaya下创建IIC-Pitaya.c文件,写入如下代码:
#include <fcntl.h>
#include <stdio.h>
#include <stdlib.h>
#include <linux/ioctl.h>
#include <sys/ioctl.h>
#include <linux/i2c-dev.h>
#include <string.h>
#include <unistd.h>
#include <errno.h>
#include <stdint.h>
#define I2C_SLAVE_FORCE 0x0706
#define I2C_SLAVE 0x0703 /*Change slave address */
#define I2C_FUNCS 0x0705 /* Get the adapter functionality */
#define I2C_RDWR 0x0707
#define EEPROM_ADDR 0x50
#define PAGESIZE 32
static int iic_read(char *buffer, int offset, int size);
static int iic_write(char *data, int offset, int size);
int fd;
int main(int argc, char *argv[])
{
int status;
int offset = 0x100;
fd = open("/dev/i2c-0", O_RDWR);
if(fd < 0)
{
printf("Cannot open the IIC device\n");
return 1;
}
status = ioctl(fd, I2C_SLAVE_FORCE, EEPROM_ADDR);
if(status < 0)
{
printf("Unable to set the EEPROM address\n");
return -1;
}
status = iic_write((char *)data, offset, size);
if(status){
fprintf(stderr, "Cannot Write to EEPROM\n");
close(fd);
return -1;
}
status = iic_read(buffer, EEPROM_ADDR, EEPROMSIZE);
if (status)
{
printf("Cannot Read from EEPROM \n");
close(fd);
return 1;
}
printf("eerprom test successfull.\n");
close(fd);
free(buffer);
return 0;
}
static int iic_read(char *buffer, int offset, int size)
{
ssize_t bytes_written;
ssize_t bytes_read;
uint8_t write_buffer[2];
write_buffer[0] = (uint8_t)(offset >> 8);
write_buffer[1] = (uint8_t)(offset);
bytes_written = write(fd, write_buffer, 2);
if(bytes_written < 0){
fprintf(stderr, "EEPROM write address error.\n");
return -1;
}
bytes_read = read(fd, buffer, size);
if(bytes_read < 0){
fprintf(stderr, "EEPROM read error.\n");
return -1;
}
printf("Read EEPROM Succesful\n");
return 0;
}
static int iic_write(char *data, int offset, int size){
int bytes_written;
int write_bytes;
int index;
if(size > PAGESIZE){
write_bytes = PAGESIZE;
}else{
write_bytes = size;
}
int loop = 0;
while(size > 0){
uint8_t write_buffer[32 + 2];
write_buffer[0] = (uint8_t)(offset >> 8);
write_buffer[1] = (uint8_t)(offset);
for(index = 0; index < PAGESIZE; index++){
write_buffer[index + 2] = data[index + (PAGESIZE * loop)];
}
sleep(2);
if(bytes_written != write_bytes+2){
fprintf(stderr, "Failed to write to EEPROM\n");
return -1;
}
size -= bytes_written - 2;
offset += PAGESIZE;
if(size > PAGESIZE){
write_bytes = PAGESIZE;
}else{
write_bytes = size;
}
loop++;
}
printf("\nWrite EEPROM Succesful\n");
return 0;
}
参考命令:
cd /hmoe/redpitaya
gcc –o IIC-Pitaya IIC-Pitaya.c
./ IIC-Pitaya
程序开始运行,返回如图4运行结果,说明通过IIC写入、读取EEPROM完成。在此基础上,读者可以根据实际项目需求,存储需要的数据到EEPROM,并在需要的时候进行读取。
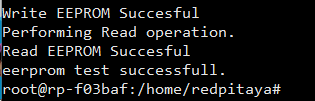
图4 读取EEPROM效果
下一节中,将会介绍通过IIC读取外部传感器数据。