https://dev.px4.io/v1.9.0/en/ros/mavros_offboard.html
官方这个只用传个pose就可以了,也就是坐标点(0.0.2)它就可以飞到2米高的地方,但问题是,这估计是基于GPS的
我要是基于双目SLAM的呢,定位信息是不是也要通过MAVROS发给飞控呢?期望位置要发这个可以确定,那这个定位信息是怎么发的?所以最后程序是怎么写的?
这是我一直一来没有弄清楚的东西。
我推理应该是当前位置和目标位置信息都需要发送才行,不然无人机不可能完成相应的任务啊。
https://blog.csdn.net/sinat_16643223/article/details/107830078
![]()

https://www.bilibili.com/video/BV1H5411t7Fx?from=search&seid=12190066108915088657

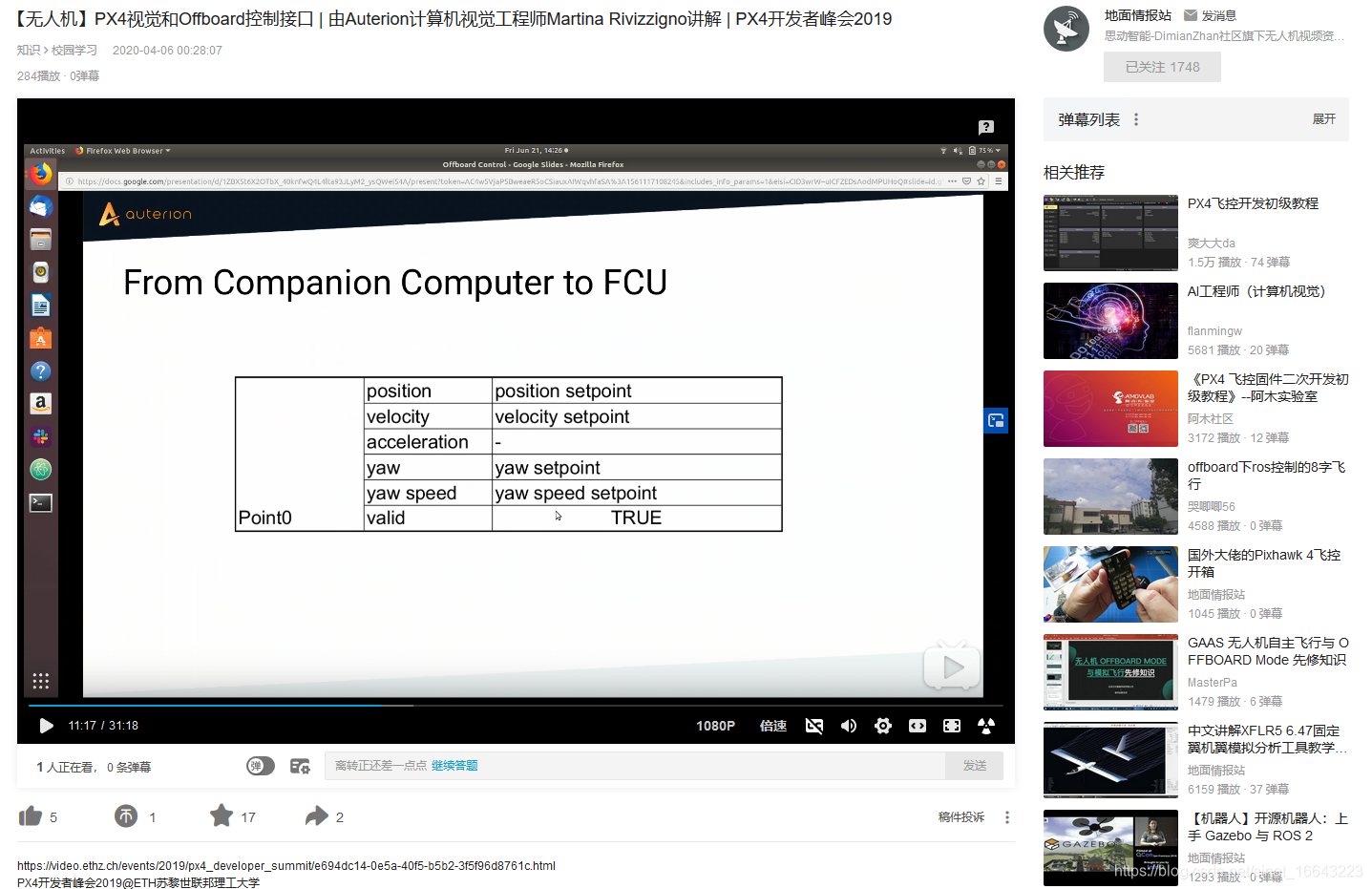
这里也是说SET_POSITION_TARGET_LOCAL_NED
这个消息,是否offboard模式下和PX4通信就是这个格式的数据
https://blog.csdn.net/xiaochengyexiao/article/details/70551203

https://www.bookstack.cn/read/TranslationPx4/10_Robotics-using-ROS-offboard-control.md

这是MAVROS的中文维基里面的,看来这两种信息确实很重要。不过它应该还是可以发送其他数据的,可能主要发送这么两种。
一个6.14 一个6.15
attitude是姿态的意思。



实际MAVROS应该可以发送这么多种数据的
http://wiki.ros.org/mavros#mavros.2FPlugins.setpoint_attitude
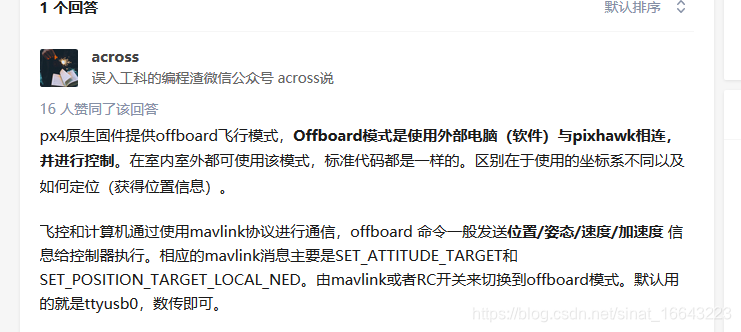
across也这么说
https://www.zhihu.com/question/41229834?from=profile_question_card
https://blog.csdn.net/liberatetheus/article/details/78005111?utm_source=blogxgwz9



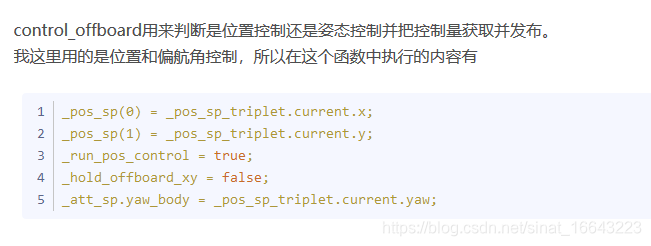
似乎就是要么位置控制要么姿态控制,本身无人机就是位置环+姿态环
https://blog.csdn.net/sinat_16643223/article/details/107874349


https://www.yuque.com/xtdrone/manual_cn/vio

ZN无人机课程里面的transfer.py也是这样。
这也说明PX4确实是接收到这个当前的位置信息的。
https://blog.csdn.net/weixin_44616080/article/details/94362903
