Convex Optimization Stephen Boyd Department of Electrical Engineering Stanford University 第11章
本文为笔者结合原书及博客https://blog.csdn.net/dymodi/article/details/46441783 记录自己相关解释
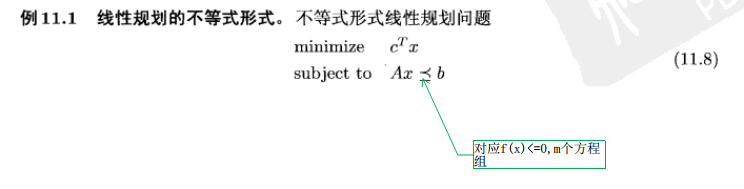
原始问题

原始问题对应的拉格朗日公式为:

利用障碍函数转化为似似的等式约束优化问题
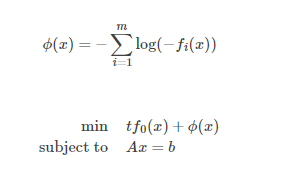
只有t足够大时,新问题的可行域会逼近原始问题,才是对原问题的一个很好的近似。
下面有相关的理论证明和直观的例子加以说明。
理论解释:t足够好,可以逼近原始问题
定义中心路径后 ,新问题的优化拉格朗日函数

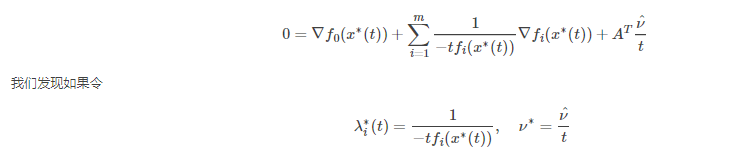
同时除以t可以发现
原始问题对应的拉格朗日公式为:
发现的是,新问题的拉格朗日是将原始问题中的约束项系数
转化为
因此:我们得出求解原始问题的新的思路,即将原始问题的拉格朗日中的约束系数转化为上述新问题中的约束项系数,即将原问题转化为新问题。
而这样近似造成的误差是多少呢?
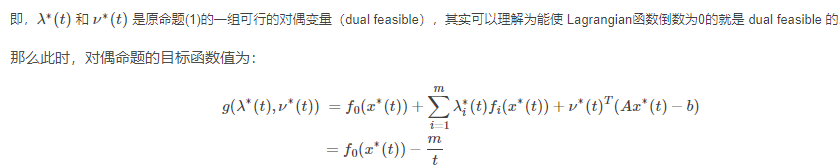
误差是m/t ,只要t足够大,误差可趋于0。
进一步KKT解释如下


内层优化求
时,利用牛顿法求解,
总之障碍法可以解释为通过障碍函数近亿约束函数,从而将不等式约束转化为等式约束问题的求解