ROS机器人
1 ROS通信机制
1.1 通信
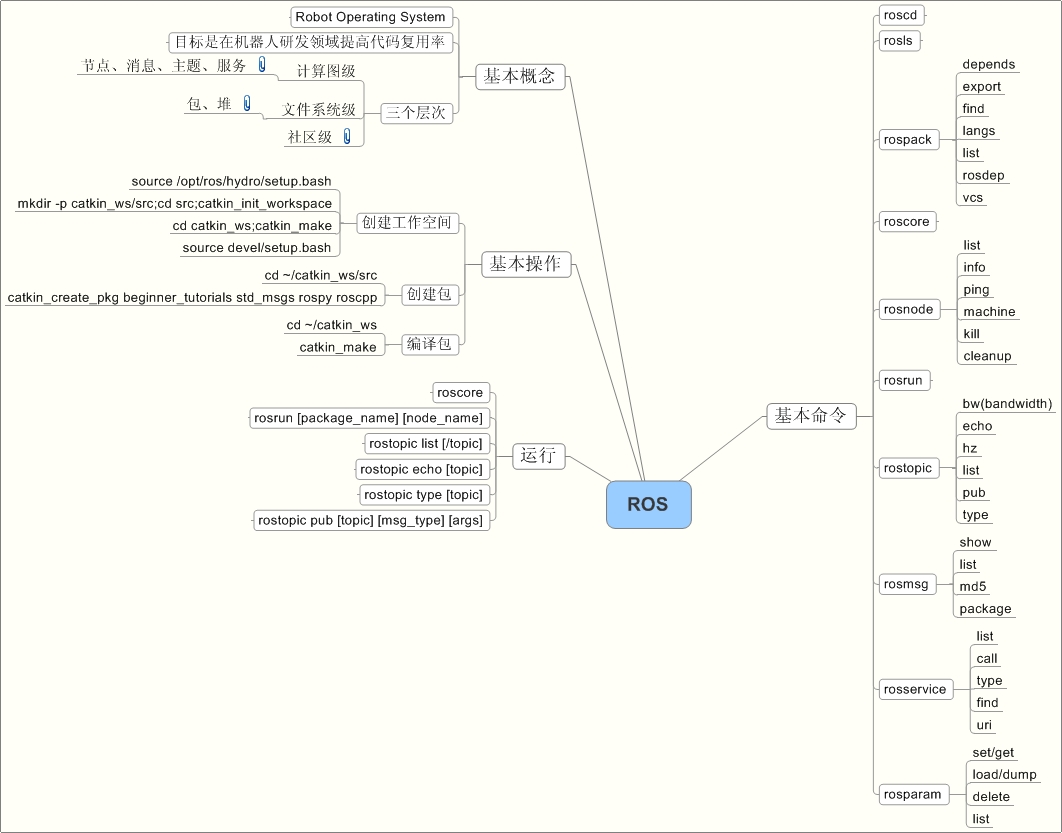
首先提出ros的整体架构:
举一个实例如下:
sever与client之间的关系如下:
代码部分参考博客总结如下:
1.2 launch文件解析
<launch>
<node pkg="occ_grid_mapping" type="odometry" name="odometry" output="screen" clear_params="true">
<rosparam file="$(find occ_grid_mapping)/config/default.yaml" command="load" />
</node>
<node pkg="occ_grid_mapping" type="mapping" name="mapping" output="screen" clear_params="true">
<rosparam file="$(find occ_grid_mapping)/config/default.yaml" command="load" />
</node>
<node pkg="rviz" type="rviz" name="rviz" output="screen"
args="-d $(find occ_grid_mapping)/rviz/default.rviz" required="true">
</node>
</launch>
这里有两个节点,occ_grid_mapping是功能包的名字,odometry是节点的名字。另外调用rviz软件并且显示数据。
2 机器人制作
参考博客。
下面介绍了STM32电机驱动板与上位机(树莓派或者arm)之间的关系示意。