A 系统的设计与校正问题
根据被控对象及其控制系统的要求,选择适当 的控制器及控制规律设计一个满足给定性能指 标的控制系统。
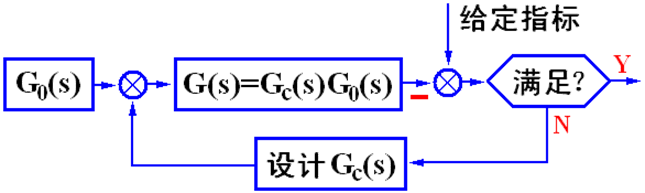
控制系统校正(补偿):通过改变系统结构,或在系统中增加附加装置或元件对已有的系统(固有部分)进行再设计使之满足性能要求。
控制系统的设计本质上是寻找合适的校正装置
工程实践中常用的校正方法:串联校正、反馈校正、 前馈校正和复合校正。

A.a 控制系统的性能指标
系统的性能指标,按其类型可以分为:
(1) 时域性能指标,包括稳态性能指标和动态性能指标;
(2) 频域性能指标,包括开环频域指标和闭环频域指标;
1 时域性能指标
(1) 稳态指标
稳态误差
(由
低频段决定):与 系统型别、静态误差系数(
)有关
(2) 动态性能指标
快速性:系统快速性越好,以下时间越短
- 上升时间
- 峰值时间
- 调整时间
平稳性:
- 最大超调量
2. 频域性能指标
(1) 开环频域指标
快速性:
- 开环截止频率 与带宽成正相关。
平稳性:
- 相角裕量 ;
- 幅值裕量
(2) 闭环频域指标
一般应对闭环频率特性提出要求,例如给出闭环 频率特性曲线,并给出闭环频域指标如下:
平稳性:
- 谐振频率
- 谐振峰值
快速性:
- 闭环带宽频率 与带宽0~ωb
实际系统中:
输入信号一般为低频信号(图中1):带宽范围内,系统能较好地跟踪。
扰动信号一般为高频信号(图中2)

要求系统:
以一定精度跟踪输入信号
抑制干扰信号


2 系统带宽的选择
选择要求:既能以所需精度跟踪输入信号,又能拟制噪 声扰动信号。在控制系统实际运行中,输入信 号一般是低频信号,而噪声信号是高频信号。
如果输入信号的带宽为
则带宽频率:

3 校正方式
| 串联校正 |  |
| 反馈校正 |  |
| 前馈校正 |  |
| 复合校正 |  |
4 基本控制规律
PID (Proportional Integral Derivative )控制:对偏差信 号e(t)进行比例、积分和微分运算变换后形成的一种基本控制 规律。是控制工程中技术成熟、理论完善、应用最为广泛的一 种控制策略。
| P控制 | |
| PD控制 | |
| PI控制 | |
| PID控制 |
以串联校正为主
比例
:
为比例系数
微分
:
为微分时常数
积分
:
为积分时常数
| (1)P(比例)控制 | |
|---|---|
 |
 |
时,开环增益加大,稳态误差减小; 幅值穿越频率
增大,过渡过程时间缩短;系统稳定程度变差。 原系统稳定裕量充分大时才采用 比例控制。

时,对系统性能的 影响正好相反。
比例控制器实质是一 种增益可调的放大器
| (2)PD(比例微分)控制 | |
|---|---|
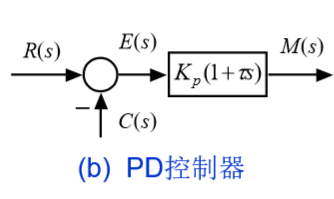 |
 |
微分控制具有预测特性。
就是微分控制作用超前于比例控制作用效果的时间间隔。


在低频段把信号幅值抬高 ,转折频率后则把斜率增加20。
PD 控制器中的微分控制规律,能反应输入信号的变 化趋势,产生有效的早期修正信号,增加系统的阻尼。 串联校正时,相当于增加零点,可提高相角裕度(加入的相角是正的)。

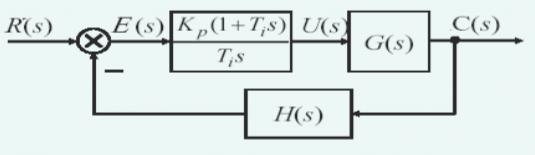
| (3)PI(比例积分)控制 | |
|---|---|
 |
 |
由于存在积分控制,PI控制器具有记忆功能(前面的积分值对后面由影响)。

高频段的零变为常数。

增加一个积分环节,提高系统的稳态精度
一个开环零点弥补积分环节对系统稳定的 不利影响


由于 ,导致引入PI控制 器后,系统的相位滞后增加,因此,若要通过 PI控制器改善系统的稳定性,必须有 , 以降低系统的幅值穿越频率。
通过引入积分控制作用以改善系统的稳态性能。 通过比例控制作用来调节积分作用所导致相角 滞后对系统的稳定性所带来的不利影响。
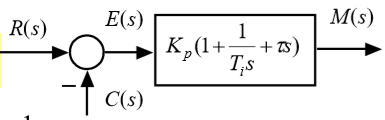
| (4)PID(比例积分微分)控制 | |
|---|---|
 |
 |

通常PID 控制器中
- 在低频段,PID控制器通过积分控制作用,改善了 系统的稳态性能;
- 在中频段,PID控制器通过微分控制作用,有效 地提高了系统的动态性能。


A.b 常用校正装置及其特性
- 有源校正网络
- 无源校正网络
用以上两种网络实现超前校正、滞后校正以及滞后超前校正。
1.无源超前校正
一般而言,当控制系统的开环增益增大到满足其静态 性能所要求的数值时,系统有可能不稳定,或者即使 能稳定,其动态性能一般也不会理想。在这种情况下, 需在系统的前向通路中增加超前校正装置,以实现在 开环增益不变的前题下,系统的动态性能亦能满足设 计的要求。

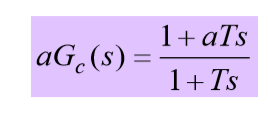
(传递函数求解)
假设该网络信号源的阻抗很小,可以忽略不计, 而输出负载的阻抗为无穷大,则其传递函数为


注:
(1)采用无源超前网络进行串联校正 时,整个系统的开环增益要下降
倍, 因此需要提高放大器增益加以补偿

此时的传递函数:
(2)超前网络的零极点分布
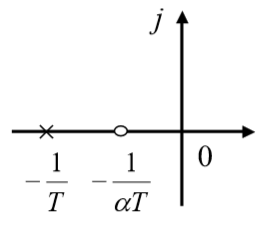
由于
,
故超前网络的负实零点总是位于负实极点之右,两者之间的距离由常数
决定。
可知改变
和
(即电路的参数
)的数值,超前网络的零极点可在s平面的负实轴任意移动。
传递函数相角:

求导并令其为零,得到最大超前角频率:
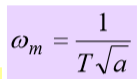
故在最大超前角频率
处,具有最大超前角

刚好位于频率 与 的几何中心。
与
的几何中心为:

即几何中心为


分析:

但a不能取得太大(为了保证较高的信噪比),a一般不超过20 这种超前校正网络的最大相位超前角一般不大于65°, 如果需要大于65° 的相位超前角,则要在两个超前网络相串联来实现,并 在所串联的两个网络之间加一隔离放大器,以消除它们 之间的负载效应。

A.c 串联校正
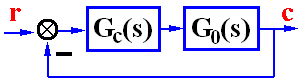
频率法对系统进行校正的基本思路是:通过所加校 正装置,改变系统开环频率特性的形状,
即要求校正 后系统的开环频率特性具有如下特点:

串联超前校正(基于频率响应法)
基本原理: 利用超前校正网络的相位超前特性来增大系统 的相角裕量,以改善系统瞬态响应。为此,要求校正网络 最大的相位超前角出现在系统的截止频率(剪切频率)处。

用频率法对系统进行串联超前校正的一般步骤可归纳为:
 |
 |
 |

串联超前校正有如下特点:
- 这种校正主要对未校正系统中频段进行校正,使校正后 中频段幅值的斜率为-20dB/dec,且有足够大的相角裕量。
- 超前校正会使系统瞬态响应的速度变快,校正后,截止频率变大,系统的频带变宽,瞬态响应速度变快;但系统抗高频噪 声的能力变差。对此,在校正装置设计时必须注意。*
- 超前校正一般虽能较有效地改善动态性能,但未校正系统 的相频特性在截止频率附近急剧下降时,若用单级超前校正网络去校正,收效不大。因为校正后系统的截止频率向高频段移动。在新的截止频率处,由于未校正系统的相角滞后量过大, 因而用单级的超前校正网络难于获得较大的相位裕量。
2.无源滞后网络

如果信号源的内部阻抗为零,负载阻抗 为无穷大,则滞后网络的传递函数为



采用无源滞后网络进行串联校正时,主 要利用其高频幅值衰减的特性,以降低系 统的开环截止频率,提高系统的相角裕度。 滞后网络怎么能提高系统的相角裕度呢?


串联滞后校正(基于频率响应法)
由于滞后校正网络具有低通滤波器的特性,因而当它与 系统的不可变部分串联相连时,会使系统开环频率特性的中 频和高频段增益降低和截止频率
减小,从而有可能使系统获得足够大的相位裕度,它不影 响频率特性的低频段。由此可见,滞后校正在一定的条件 下,也能使系统同时满足动态和静态的要求。
不难看出,滞后校正的不足之处是:滞后校正网络的截止频率会减小,瞬态响应的速度要变慢;在截止频率
处, 滞后校正网络会产生一定的相角滞后量。为了使这个滞后角尽可能地小,理论上总希望
两个转折频率
比
,越小越好,但还要考虑物理实现上的可行性.。
- 在系统响应速度要求不高而抑制噪声电平性能要求 较高的情况下,可考虑采用串联滞后校正
- 保持原有的已满足要求的动态性能不变,而用以提高 系统的开环增益,减小系统的稳态误差。
如果所研究的系统为单位反馈最小相位系统,则应用频 率法设计串联滞后校正网络的步骤如下:

串联超前校正和串联滞后校正方法的适用范围和特点
(1)超前校正是利用超前网络的相角超前特性对系统进行校正, 而滞后校正则是利用滞后网络的幅值在高频衰减特性;
(2)用频率法进行超前校正,旨在提高开环对数幅频渐进 线在截止频率处的斜率(-40dB/dec提高到-20dB/dec),和 相位裕度,并增大系统的频带宽度。频带的变宽意味着 校正后的系统响应变快,调整时间缩短。
(3)对同一系统超前校正系统的频带宽度一般总大于滞后 校正系统,因此,如果要求校正后的系统具有宽的频带 和良好的瞬态响应,则采用超前校正。当噪声电平较高 时,显然频带越宽的系统抗噪声干扰的能力也越差。对 于这种情况,宜对系统采用滞后校正。
(4)超前校正需要增加一个附加的放大器,以补偿超前 校正网络对系统增益的衰减。
(5)滞后校正虽然能改善系统的静态精度,但它促使系 统的频带变窄,瞬态响应速度变慢。如果要求校正后 的系统既有快速的瞬态响应,又有高的静态精度,则 应采用滞后-超前校正。
有些应用方面,采用滞后校正可能得出时间常数大到不能实现的结果。
3.无源滞后-超前网络



滞后-超前校正装置的特性

串联滞后-超前校正
兼有滞后校正和超前校正的优点,即已校正系统响应速 度快,超调量小,抑制高频噪声的性能也较好。当未校正系 统不稳定,且对校正后的系统的动态和静态性能(响应速度、 相位裕度和稳态误差)均有较高要求时,显然,仅采用上述超 前校正或滞后校正,均难以达到预期的校正效果。此时宜采 用串联滞后-超前校正。
串联滞后-超前校正,实质上综合应用了滞后和超前校 正各自的特点,即利用校正装置的超前部分来增大系统 的相位裕度,以改善其动态性能;利用它的滞后部分来 改善系统的静态性能,两者分工明确,相辅相成。
串联滞后-超前校正的设计步骤如下:
 |
 |
 |
 |