基本思想:对卡尔曼滤波的算法的学习、理解及其应用;
代表t-1时刻时,小车的位置;
代表t时刻时,小车移动的位置
代表t-1时刻时,小车的速度;
代表t时刻时,小车的速度
=t时刻与t-1时刻的时间差
当小车从t-1时刻移动到t时刻时,此时小车的位置为=
+
*
当小车从t-1时刻移动到t时刻时,此时小车的速度仍然为=
按照力学的定义:
- 加速度的定义为u,表示每个时刻小车进行前进的加速度
其基本定义为: u=(-
)/
位移距离s=*
+(1/2)*u*
当小车从t-1时刻移动到t时刻时,此时小车的位置为:(末位置=起始位置+移动位置)
=
+
*
+(1/2)*u*
末速度:=
+u*
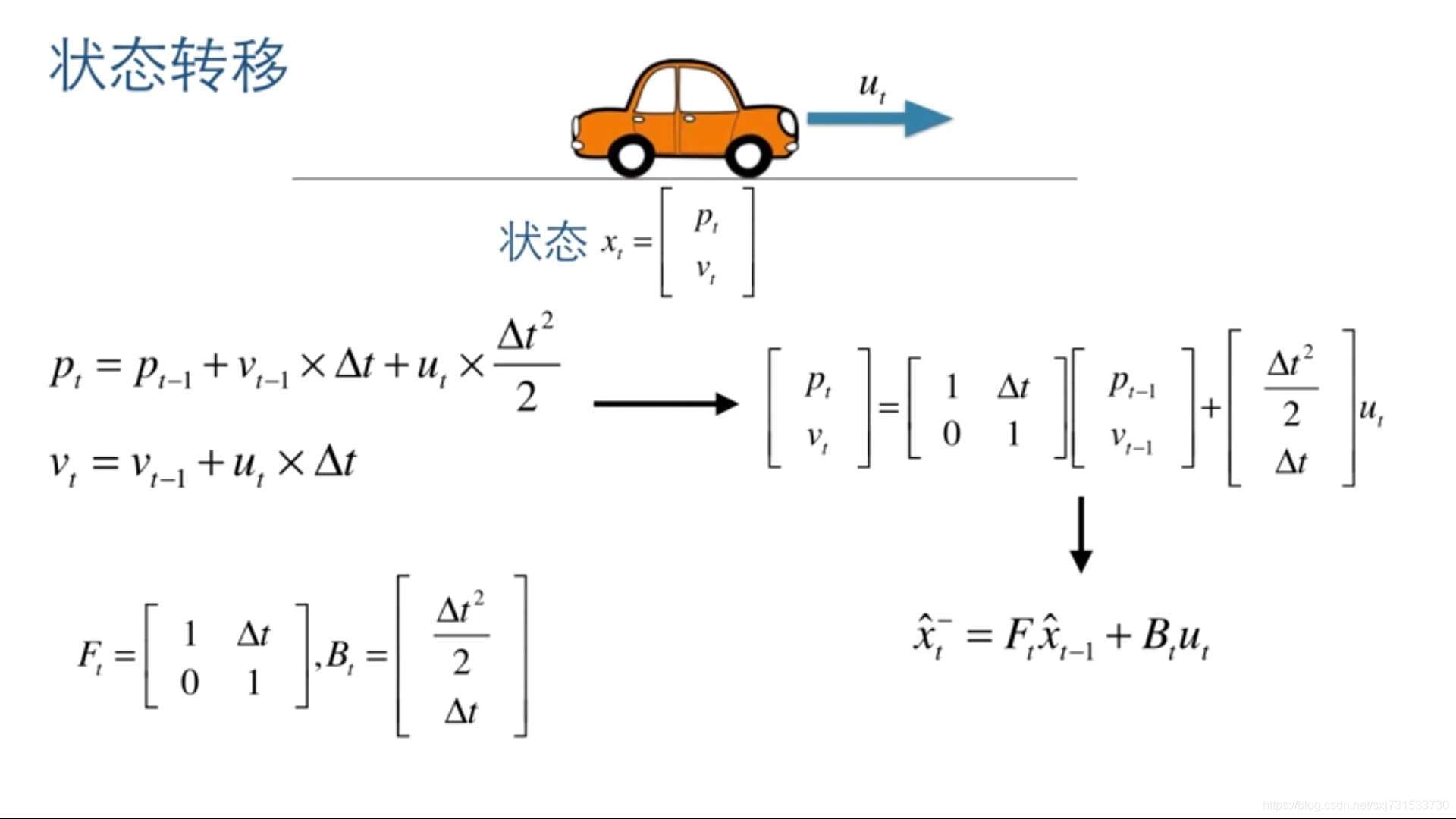
综合上面的解释,小车的从t-1时刻到t时刻的位置量和速度量分别为公式:
=
+
*
+(1/2)*u*
=
+u*
然后进行矩阵提取,F称为状态转移矩阵,为上一状态转化到下一状态,B称为控制矩阵 控制量u如何作用于当前状态;
未完待续: