1.rtknavi.exe
实时定位工具,两种定位方式:
(1)标准定位
输入原始观测量,输出标准定位,水平精度CEP50 2.5m
(2)高精度定位
输入原始观测量和RTK差分数据,输出高精度定位,水平精度分米甚至厘米
An real-time positioning AP RTKNAVI inputs raw observation data of GPS/GNSS receivers and execute navigation processing in real-time. By setting the positioning mode to Kinematic and configuring the rover and the base station receiver data inputs, RTK-GPS/GNSS is enabled with OTF (on-the-fly) integer ambiguity resolution.
2.how to use rtknavi.exe
2.1高精度定位
refer to http://www.rtklib.com/rtklib_tutorial.htm
(1) Download RTKLIB_2.4.1 package and install it to <RTKLIB_install_dir> according to RTKLIB manual.
(2) Download sample data rtklibsample.zip (6.1MB) for RTK and extract it to an appropriate directory <sample_dir>.
(3) Execute rtknavi.exe in <RTKLIB_install_dir>\bin. You can see RTKNAVI window.
(4) Push [Options...] on RTKNAVI. you can see Options dialog.
(5) Push [ Load ] on Options dialog.
(6) Select <sample_dir>\rtknavi_rtk.conf to load pre-defined RTK options. Push [ OK ] on Options dialog.
(7) Push [I] upper of RTKNAVI window to set the input stream options. You can see Input Streams dialog.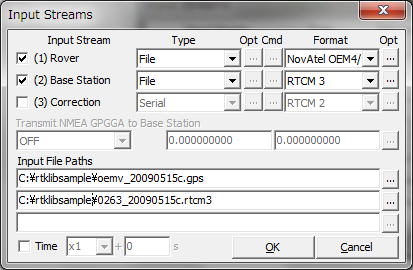
(8) Input the file paths for Rover and Base Station. Push [...] right of Input File Paths fields and select <sample_dir>\oemv_20090515c.gps for the first column. Select <sample_dir>\0263_20090515c.rtcm3 for the second column as well. These are 20 Hz raw data of NovAtel OEMV-3 GPS receiver on a running vehicle and 1 Hz VRS RTCM 3 data provided by NGDS network-RTK service via mobile internet connection. These data were collected on 2009/5/15.

(9) Check Time and select x1 with the right pull-down menu to set the playback speed and push [ OK ] on Input Streams dialog.
(10) Push [ Plot... ] on RTKNAVI. You can see RTKPLOT window.

(11) Execute the menu [File] - [Open Map Image...] of RTKPLOT. Select <sample_dir>\nirasaki.jpg to show a background map image.

(12) Move the cursor inside of the RTKPLOT window, push the right-button of the mouse and drag the cursor up or down. You can expand or shrink the map image.鼠标右键他动来放大或缩小图片

(13) Push [ Start ] on RTKNAVI. RTKNAVI starts playback of the recorded data. You can get RTK solutions several seconds after the start. Solution: FIX means ambiguity-resolved RTK solution obtained, which has usually cm-class accuracy.

(14) The position of the RTK solution can be seen on RTKPLOT as a circle mark. The track is also shown on the window. Push button on Tool Bar and drag the cursor with the left-button of the mouse, you can move the map image. To fix the current position center of the window, push
again.
(15) By pushing buttons on RTKNAVI window, you can change the display mode.
(16) By pushing button on RTKNAVI, you can see RTK Monitor, which indicates the detailed status of RTK positioning.

(17) After finishing the playback, push [ Stop ] on RTKNAVI.
(18) Push button on RTKPLOT to disconnect from RTKNAVI and execute the menu [File] - [Open Solution-2...] of RTKPLOT. Select <sample_data>\ubx_20090515c.ubx for the second solution data. The file contains the captured 4 Hz NMEA data of a u-blox LEA-4T GPS receiver. You can compare the RTK solutions by RTKLIB and the solutions by a general purpose GPS receiver. The u-blox and NovAtel were connected the same antenna GPS-702-GG mounted on the roof-top of the running vehicle via a signal splitter.Note that the u-blox NMEA solutions were obtained with SBAS corrections enabled.
