SC60开发板默认是不支持CAN接口的,需要外接转换芯片,选取MICROCHIP的MCP25625这一款。
芯片特点如下:
• Stand-Alone CAN 2.0B Controller with Integrated CAN Transceiver and Serial Peripheral
Interface (SPI)
• Up to 1 Mb/s Operation
• Very Low Standby Current (10 μA, typical)
• Up to 10 MHz SPI Clock Speed
• Interfaces Directly with Microcontrollers with 2.7V to 5.5V I/Os
• Available in SSOP-28L and 6x6 QFN-28L
• Temperature Ranges: - Extended (E): -40°C to +125°C
最主要的特点是集成了Transceiver,避免了外接Transceiver的电路,设计简单。
参考原理图:
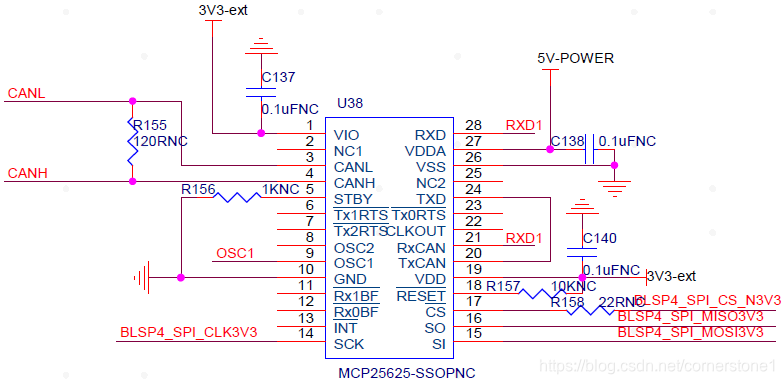
osc1接8M晶振,CANL和CANH连接到外部CAN网络,串联120欧的阻抗匹配,使用4线SPI和主控通讯。
驱动参考:
/*
* CAN bus driver for Microchip 251x CAN Controller with SPI Interface
*
* MCP2510 support and bug fixes by Christian Pellegrin
* <[email protected]>
*
* Copyright 2009 Christian Pellegrin EVOL S.r.l.
*
* Copyright 2007 Raymarine UK, Ltd. All Rights Reserved.
* Written under contract by:
* Chris Elston, Katalix Systems, Ltd.
*
* Based on Microchip MCP251x CAN controller driver written by
* David Vrabel, Copyright 2006 Arcom Control Systems Ltd.
*
* Based on CAN bus driver for the CCAN controller written by
* - Sascha Hauer, Marc Kleine-Budde, Pengutronix
* - Simon Kallweit, intefo AG
* Copyright 2007
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the version 2 of the GNU General Public License
* as published by the Free Software Foundation
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA
*
*
*
* Your platform definition file should specify something like:
*
* static struct mcp251x_platform_data mcp251x_info = {
* .oscillator_frequency = 8000000,
* .board_specific_setup = &mcp251x_setup,
* .power_enable = mcp251x_power_enable,
* .transceiver_enable = NULL,
* };
*
* static struct spi_board_info spi_board_info[] = {
* {
* .modalias = "mcp2510",
* // or "mcp2515" depending on your controller
* .platform_data = &mcp251x_info,
* .irq = IRQ_EINT13,
* .max_speed_hz = 2*1000*1000,
* .chip_select = 2,
* },
* };
*
* Please see mcp251x.h for a description of the fields in
* struct mcp251x_platform_data.
*
*/
#include <linux/can/core.h>
#include <linux/can/dev.h>
#include <linux/can/led.h>
#include <linux/can/platform/mcp251x.h>
#include <linux/completion.h>
#include <linux/delay.h>
#include <linux/device.h>
#include <linux/dma-mapping.h>
#include <linux/freezer.h>
#include <linux/interrupt.h>
#include <linux/io.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/netdevice.h>
#include <linux/platform_device.h>
#include <linux/slab.h>
#include <linux/spi/spi.h>
#include <linux/uaccess.h>
//stone added
#include <linux/of_gpio.h>
/* SPI interface instruction set */
#define INSTRUCTION_WRITE 0x02
#define INSTRUCTION_READ 0x03
#define INSTRUCTION_BIT_MODIFY 0x05
#define INSTRUCTION_LOAD_TXB(n) (0x40 + 2 * (n))
#define INSTRUCTION_READ_RXB(n) (((n) == 0) ? 0x90 : 0x94)
#define INSTRUCTION_RESET 0xC0
#define RTS_TXB0 0x01
#define RTS_TXB1 0x02
#define RTS_TXB2 0x04
#define INSTRUCTION_RTS(n) (0x80 | ((n) & 0x07))
/* MPC251x registers */
#define CANSTAT 0x0e
#define CANCTRL 0x0f
# define CANCTRL_REQOP_MASK 0xe0
# define CANCTRL_REQOP_CONF 0x80
# define CANCTRL_REQOP_LISTEN_ONLY 0x60
# define CANCTRL_REQOP_LOOPBACK 0x40
# define CANCTRL_REQOP_SLEEP 0x20
# define CANCTRL_REQOP_NORMAL 0x00
# define CANCTRL_OSM 0x08
# define CANCTRL_ABAT 0x10
#define TEC 0x1c
#define REC 0x1d
#define CNF1 0x2a
# define CNF1_SJW_SHIFT 6
#define CNF2 0x29
# define CNF2_BTLMODE 0x80
# define CNF2_SAM 0x40
# define CNF2_PS1_SHIFT 3
#define CNF3 0x28
# define CNF3_SOF 0x08
# define CNF3_WAKFIL 0x04
# define CNF3_PHSEG2_MASK 0x07
#define CANINTE 0x2b
# define CANINTE_MERRE 0x80
# define CANINTE_WAKIE 0x40
# define CANINTE_ERRIE 0x20
# define CANINTE_TX2IE 0x10
# define CANINTE_TX1IE 0x08
# define CANINTE_TX0IE 0x04
# define CANINTE_RX1IE 0x02
# define CANINTE_RX0IE 0x01
#define CANINTF 0x2c
# define CANINTF_MERRF 0x80
# define CANINTF_WAKIF 0x40
# define CANINTF_ERRIF 0x20
# define CANINTF_TX2IF 0x10
# define CANINTF_TX1IF 0x08
# define CANINTF_TX0IF 0x04
# define CANINTF_RX1IF 0x02
# define CANINTF_RX0IF 0x01
# define CANINTF_RX (CANINTF_RX0IF | CANINTF_RX1IF)
# define CANINTF_TX (CANINTF_TX2IF | CANINTF_TX1IF | CANINTF_TX0IF)
# define CANINTF_ERR (CANINTF_ERRIF)
#define EFLG 0x2d
# define EFLG_EWARN 0x01
# define EFLG_RXWAR 0x02
# define EFLG_TXWAR 0x04
# define EFLG_RXEP 0x08
# define EFLG_TXEP 0x10
# define EFLG_TXBO 0x20
# define EFLG_RX0OVR 0x40
# define EFLG_RX1OVR 0x80
#define TXBCTRL(n) (((n) * 0x10) + 0x30 + TXBCTRL_OFF)
# define TXBCTRL_ABTF 0x40
# define TXBCTRL_MLOA 0x20
# define TXBCTRL_TXERR 0x10
# define TXBCTRL_TXREQ 0x08
#define TXBSIDH(n) (((n) * 0x10) + 0x30 + TXBSIDH_OFF)
# define SIDH_SHIFT 3
#define TXBSIDL(n) (((n) * 0x10) + 0x30 + TXBSIDL_OFF)
# define SIDL_SID_MASK 7
# define SIDL_SID_SHIFT 5
# define SIDL_EXIDE_SHIFT 3
# define SIDL_EID_SHIFT 16
# define SIDL_EID_MASK 3
#define TXBEID8(n) (((n) * 0x10) + 0x30 + TXBEID8_OFF)
#define TXBEID0(n) (((n) * 0x10) + 0x30 + TXBEID0_OFF)
#define TXBDLC(n) (((n) * 0x10) + 0x30 + TXBDLC_OFF)
# define DLC_RTR_SHIFT 6
#define TXBCTRL_OFF 0
#define TXBSIDH_OFF 1
#define TXBSIDL_OFF 2
#define TXBEID8_OFF 3
#define TXBEID0_OFF 4
#define TXBDLC_OFF 5
#define TXBDAT_OFF 6
#define RXBCTRL(n) (((n) * 0x10) + 0x60 + RXBCTRL_OFF)
# define RXBCTRL_BUKT 0x04
# define RXBCTRL_RXM0 0x20
# define RXBCTRL_RXM1 0x40
#define RXBSIDH(n) (((n) * 0x10) + 0x60 + RXBSIDH_OFF)
# define RXBSIDH_SHIFT 3
#define RXBSIDL(n) (((n) * 0x10) + 0x60 + RXBSIDL_OFF)
# define RXBSIDL_IDE 0x08
# define RXBSIDL_SRR 0x10
# define RXBSIDL_EID 3
# define RXBSIDL_SHIFT 5
#define RXBEID8(n) (((n) * 0x10) + 0x60 + RXBEID8_OFF)
#define RXBEID0(n) (((n) * 0x10) + 0x60 + RXBEID0_OFF)
#define RXBDLC(n) (((n) * 0x10) + 0x60 + RXBDLC_OFF)
# define RXBDLC_LEN_MASK 0x0f
# define RXBDLC_RTR 0x40
#define RXBCTRL_OFF 0
#define RXBSIDH_OFF 1
#define RXBSIDL_OFF 2
#define RXBEID8_OFF 3
#define RXBEID0_OFF 4
#define RXBDLC_OFF 5
#define RXBDAT_OFF 6
#define RXFSIDH(n) ((n) * 4)
#define RXFSIDL(n) ((n) * 4 + 1)
#define RXFEID8(n) ((n) * 4 + 2)
#define RXFEID0(n) ((n) * 4 + 3)
#define RXMSIDH(n) ((n) * 4 + 0x20)
#define RXMSIDL(n) ((n) * 4 + 0x21)
#define RXMEID8(n) ((n) * 4 + 0x22)
#define RXMEID0(n) ((n) * 4 + 0x23)
#define GET_BYTE(val, byte) \
(((val) >> ((byte) * 8)) & 0xff)
#define SET_BYTE(val, byte) \
(((val) & 0xff) << ((byte) * 8))
/*
* Buffer size required for the largest SPI transfer (i.e., reading a
* frame)
*/
#define CAN_FRAME_MAX_DATA_LEN 8
#define SPI_TRANSFER_BUF_LEN (6 + CAN_FRAME_MAX_DATA_LEN)
#define CAN_FRAME_MAX_BITS 128
#define TX_ECHO_SKB_MAX 1
#define DEVICE_NAME "mcp25625"
static int mcp251x_enable_dma; /* Enable SPI DMA. Default: 0 (Off) */
module_param(mcp251x_enable_dma, int, S_IRUGO);
MODULE_PARM_DESC(mcp251x_enable_dma, "Enable SPI DMA. Default: 0 (Off)");
static const struct can_bittiming_const mcp251x_bittiming_const = {
.name = DEVICE_NAME,
.tseg1_min = 3,
.tseg1_max = 16,
.tseg2_min = 2,
.tseg2_max = 8,
.sjw_max = 4,
.brp_min = 1,
.brp_max = 64,
.brp_inc = 1,
};
enum mcp251x_model {
CAN_MCP251X_MCP2510 = 0x2510,
CAN_MCP251X_MCP2515 = 0x2515,
};
struct mcp251x_priv {
struct can_priv can;
struct net_device *net;
struct spi_device *spi;
enum mcp251x_model model;
struct mutex mcp_lock; /* SPI device lock */
u8 *spi_tx_buf;
u8 *spi_rx_buf;
dma_addr_t spi_tx_dma;
dma_addr_t spi_rx_dma;
struct sk_buff *tx_skb;
int tx_len;
struct workqueue_struct *wq;
struct work_struct tx_work;
struct work_struct restart_work;
//stone added
struct work_struct irq_work;
int force_quit;
int after_suspend;
#define AFTER_SUSPEND_UP 1
#define AFTER_SUSPEND_DOWN 2
#define AFTER_SUSPEND_POWER 4
#define AFTER_SUSPEND_RESTART 8
int restart_tx;
};
#define MCP251X_IS(_model) \
static inline int mcp251x_is_##_model(struct spi_device *spi) \
{ \
struct mcp251x_priv *priv = spi_get_drvdata(spi); \
return priv->model == CAN_MCP251X_MCP##_model; \
}
MCP251X_IS(2510);
MCP251X_IS(2515);
//Begin:stone added
static struct mcp251x_platform_data mcp251x_info = {
.oscillator_frequency = 8000000,
//.board_specific_setup = &mcp251x_setup,
//.power_enable = mcp251x_power_enable,
.transceiver_enable = NULL,
};
//End:stone added
static void mcp251x_clean(struct net_device *net)
{
struct mcp251x_priv *priv = netdev_priv(net);
if (priv->tx_skb || priv->tx_len)
net->stats.tx_errors++;
if (priv->tx_skb)
dev_kfree_skb(priv->tx_skb);
if (priv->tx_len)
can_free_echo_skb(priv->net, 0);
priv->tx_skb = NULL;
priv->tx_len = 0;
}
/*
* Note about handling of error return of mcp251x_spi_trans: accessing
* registers via SPI is not really different conceptually than using
* normal I/O assembler instructions, although it's much more
* complicated from a practical POV. So it's not advisable to always
* check the return value of this function. Imagine that every
* read{b,l}, write{b,l} and friends would be bracketed in "if ( < 0)
* error();", it would be a great mess (well there are some situation
* when exception handling C++ like could be useful after all). So we
* just check that transfers are OK at the beginning of our
* conversation with the chip and to avoid doing really nasty things
* (like injecting bogus packets in the network stack).
*/
static int mcp251x_spi_trans(struct spi_device *spi, int len)
{
struct mcp251x_priv *priv = spi_get_drvdata(spi);
struct spi_transfer t = {
.tx_buf = priv->spi_tx_buf,
.rx_buf = priv->spi_rx_buf,
.len = len,
.cs_change = 0,
};
struct spi_message m;
int ret;
spi_message_init(&m);
if (mcp251x_enable_dma) {
t.tx_dma = priv->spi_tx_dma;
t.rx_dma = priv->spi_rx_dma;
m.is_dma_mapped = 1;
}
spi_message_add_tail(&t, &m);
ret = spi_sync(spi, &m);
if (ret)
dev_err(&spi->dev, "spi transfer failed: ret = %d\n", ret);
return ret;
}
static u8 mcp251x_read_reg(struct spi_device *spi, uint8_t reg)
{
struct mcp251x_priv *priv = spi_get_drvdata(spi);
u8 val = 0;
priv->spi_tx_buf[0] = INSTRUCTION_READ;
priv->spi_tx_buf[1] = reg;
mcp251x_spi_trans(spi, 3);
val = priv->spi_rx_buf[2];
return val;
}
static void mcp251x_read_2regs(struct spi_device *spi, uint8_t reg,
uint8_t *v1, uint8_t *v2)
{
struct mcp251x_priv *priv = spi_get_drvdata(spi);
priv->spi_tx_buf[0] = INSTRUCTION_READ;
priv->spi_tx_buf[1] = reg;
mcp251x_spi_trans(spi, 4);
*v1 = priv->spi_rx_buf[2];
*v2 = priv->spi_rx_buf[3];
}
static void mcp251x_write_reg(struct spi_device *spi, u8 reg, uint8_t val)
{
struct mcp251x_priv *priv = spi_get_drvdata(spi);
priv->spi_tx_buf[0] = INSTRUCTION_WRITE;
priv->spi_tx_buf[1] = reg;
priv->spi_tx_buf[2] = val;
mcp251x_spi_trans(spi, 3);
}
static void mcp251x_write_bits(struct spi_device *spi, u8 reg,
u8 mask, uint8_t val)
{
struct mcp251x_priv *priv = spi_get_drvdata(spi);
priv->spi_tx_buf[0] = INSTRUCTION_BIT_MODIFY;
priv->spi_tx_buf[1] = reg;
priv->spi_tx_buf[2] = mask;
priv->spi_tx_buf[3] = val;
mcp251x_spi_trans(spi, 4);
}
static void mcp251x_hw_tx_frame(struct spi_device *spi, u8 *buf,
int len, int tx_buf_idx)
{
struct mcp251x_priv *priv = spi_get_drvdata(spi);
//stone added
dev_err(&spi->dev, "-----mcp251x_hw_tx_frame-----");
//stone modify
if (mcp251x_is_2510(spi)) {
//if(1){
int i;
for (i = 1; i < TXBDAT_OFF + len; i++)
mcp251x_write_reg(spi, TXBCTRL(tx_buf_idx) + i,
buf[i]);
}
else {
//stone added
dev_err(&spi->dev, "-----mcp251x_hw_tx_frame else-----");
memcpy(priv->spi_tx_buf, buf, TXBDAT_OFF + len);
mcp251x_spi_trans(spi, TXBDAT_OFF + len);
}
}
static void mcp251x_hw_tx(struct spi_device *spi, struct can_frame *frame,
int tx_buf_idx)
{
//stone delete
//struct mcp251x_priv *priv = spi_get_drvdata(spi);
u32 sid, eid, exide, rtr;
u8 buf[SPI_TRANSFER_BUF_LEN];
dev_err(&spi->dev, "-----mcp251x_hw_tx-----");
exide = (frame->can_id & CAN_EFF_FLAG) ? 1 : 0; /* Extended ID Enable */
if (exide)
sid = (frame->can_id & CAN_EFF_MASK) >> 18;
else
sid = frame->can_id & CAN_SFF_MASK; /* Standard ID */
eid = frame->can_id & CAN_EFF_MASK; /* Extended ID */
rtr = (frame->can_id & CAN_RTR_FLAG) ? 1 : 0; /* Remote transmission */
buf[TXBCTRL_OFF] = INSTRUCTION_LOAD_TXB(tx_buf_idx);
buf[TXBSIDH_OFF] = sid >> SIDH_SHIFT;
buf[TXBSIDL_OFF] = ((sid & SIDL_SID_MASK) << SIDL_SID_SHIFT) |
(exide << SIDL_EXIDE_SHIFT) |
((eid >> SIDL_EID_SHIFT) & SIDL_EID_MASK);
buf[TXBEID8_OFF] = GET_BYTE(eid, 1);
buf[TXBEID0_OFF] = GET_BYTE(eid, 0);
buf[TXBDLC_OFF] = (rtr << DLC_RTR_SHIFT) | frame->can_dlc;
memcpy(buf + TXBDAT_OFF, frame->data, frame->can_dlc);
mcp251x_hw_tx_frame(spi, buf, frame->can_dlc, tx_buf_idx);
//stone added this line
mcp251x_write_reg(spi, TXBCTRL(tx_buf_idx), TXBCTRL_TXREQ);//请求发送tx0
/* use INSTRUCTION_RTS, to avoid "repeated frame problem" */
//stone delete
//priv->spi_tx_buf[0] = INSTRUCTION_RTS(1 << tx_buf_idx);
//mcp251x_spi_trans(priv->spi, 1);
}
static void mcp251x_hw_rx_frame(struct spi_device *spi, u8 *buf,
int buf_idx)
{
struct mcp251x_priv *priv = spi_get_drvdata(spi);
if (mcp251x_is_2510(spi)) {
int i, len;
for (i = 1; i < RXBDAT_OFF; i++)
buf[i] = mcp251x_read_reg(spi, RXBCTRL(buf_idx) + i);
len = get_can_dlc(buf[RXBDLC_OFF] & RXBDLC_LEN_MASK);
for (; i < (RXBDAT_OFF + len); i++)
buf[i] = mcp251x_read_reg(spi, RXBCTRL(buf_idx) + i);
} else {
priv->spi_tx_buf[RXBCTRL_OFF] = INSTRUCTION_READ_RXB(buf_idx);
mcp251x_spi_trans(spi, SPI_TRANSFER_BUF_LEN);
memcpy(buf, priv->spi_rx_buf, SPI_TRANSFER_BUF_LEN);
}
}
static void mcp251x_hw_rx(struct spi_device *spi, int buf_idx)
{
struct mcp251x_priv *priv = spi_get_drvdata(spi);
struct sk_buff *skb;
struct can_frame *frame;
u8 buf[SPI_TRANSFER_BUF_LEN];
//stone added debug
int i;
skb = alloc_can_skb(priv->net, &frame);
if (!skb) {
dev_err(&spi->dev, "cannot allocate RX skb\n");
priv->net->stats.rx_dropped++;
return;
}
mcp251x_hw_rx_frame(spi, buf, buf_idx);
//Begin:stone added debug for rx data
dev_err(&spi->dev, "buf_idx=%d\n",buf_idx);
for(i=0; i<SPI_TRANSFER_BUF_LEN; i++)
{
dev_err(&spi->dev, "buf[%d]=%x\n",i,buf[i]);
}
//End:stone added debug for rx data
if (buf[RXBSIDL_OFF] & RXBSIDL_IDE) {
/* Extended ID format */
frame->can_id = CAN_EFF_FLAG;
frame->can_id |=
/* Extended ID part */
SET_BYTE(buf[RXBSIDL_OFF] & RXBSIDL_EID, 2) |
SET_BYTE(buf[RXBEID8_OFF], 1) |
SET_BYTE(buf[RXBEID0_OFF], 0) |
/* Standard ID part */
(((buf[RXBSIDH_OFF] << RXBSIDH_SHIFT) |
(buf[RXBSIDL_OFF] >> RXBSIDL_SHIFT)) << 18);
/* Remote transmission request */
if (buf[RXBDLC_OFF] & RXBDLC_RTR)
frame->can_id |= CAN_RTR_FLAG;
} else {
/* Standard ID format */
frame->can_id =
(buf[RXBSIDH_OFF] << RXBSIDH_SHIFT) |
(buf[RXBSIDL_OFF] >> RXBSIDL_SHIFT);
if (buf[RXBSIDL_OFF] & RXBSIDL_SRR)
frame->can_id |= CAN_RTR_FLAG;
}
/* Data length */
frame->can_dlc = get_can_dlc(buf[RXBDLC_OFF] & RXBDLC_LEN_MASK);
memcpy(frame->data, buf + RXBDAT_OFF, frame->can_dlc);
priv->net->stats.rx_packets++;
priv->net->stats.rx_bytes += frame->can_dlc;
can_led_event(priv->net, CAN_LED_EVENT_RX);
netif_rx_ni(skb);
}
static void mcp251x_hw_sleep(struct spi_device *spi)
{
mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_SLEEP);
}
static netdev_tx_t mcp251x_hard_start_xmit(struct sk_buff *skb,
struct net_device *net)
{
struct mcp251x_priv *priv = netdev_priv(net);
struct spi_device *spi = priv->spi;
if (priv->tx_skb || priv->tx_len) {
dev_warn(&spi->dev, "hard_xmit called while tx busy\n");
return NETDEV_TX_BUSY;
}
if (can_dropped_invalid_skb(net, skb))
return NETDEV_TX_OK;
netif_stop_queue(net);
priv->tx_skb = skb;
queue_work(priv->wq, &priv->tx_work);
return NETDEV_TX_OK;
}
static int mcp251x_do_set_mode(struct net_device *net, enum can_mode mode)
{
struct mcp251x_priv *priv = netdev_priv(net);
switch (mode) {
case CAN_MODE_START:
mcp251x_clean(net);
/* We have to delay work since SPI I/O may sleep */
priv->can.state = CAN_STATE_ERROR_ACTIVE;
priv->restart_tx = 1;
if (priv->can.restart_ms == 0)
priv->after_suspend = AFTER_SUSPEND_RESTART;
queue_work(priv->wq, &priv->restart_work);
break;
default:
return -EOPNOTSUPP;
}
return 0;
}
static int mcp251x_set_normal_mode(struct spi_device *spi)
{
struct mcp251x_priv *priv = spi_get_drvdata(spi);
unsigned long timeout;
/* Enable interrupts */
mcp251x_write_reg(spi, CANINTE,
CANINTE_ERRIE | CANINTE_TX2IE | CANINTE_TX1IE |
CANINTE_TX0IE | CANINTE_RX1IE | CANINTE_RX0IE);
if (priv->can.ctrlmode & CAN_CTRLMODE_LOOPBACK) {
/* Put device into loopback mode */
mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_LOOPBACK);
} else if (priv->can.ctrlmode & CAN_CTRLMODE_LISTENONLY) {
/* Put device into listen-only mode */
mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_LISTEN_ONLY);
} else {
dev_err(&spi->dev, "mcp251x_set_normal_mode else \n");
/* Put device into normal mode */
mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_NORMAL);
/* Wait for the device to enter normal mode */
timeout = jiffies + HZ;
while (mcp251x_read_reg(spi, CANSTAT) & CANCTRL_REQOP_MASK) {
schedule();
if (time_after(jiffies, timeout)) {
dev_err(&spi->dev, "MCP251x didn't"
" enter in normal mode\n");
return -EBUSY;
}
}
}
priv->can.state = CAN_STATE_ERROR_ACTIVE;
return 0;
}
static int mcp251x_do_set_bittiming(struct net_device *net)
{
struct mcp251x_priv *priv = netdev_priv(net);
struct can_bittiming *bt = &priv->can.bittiming;
struct spi_device *spi = priv->spi;
dev_err(&spi->dev, "before CNF: 0x%02x 0x%02x 0x%02x\n",
mcp251x_read_reg(spi, CNF1),
mcp251x_read_reg(spi, CNF2),
mcp251x_read_reg(spi, CNF3));
mcp251x_write_reg(spi, CNF1, ((bt->sjw - 1) << CNF1_SJW_SHIFT) |
(bt->brp - 1));
mcp251x_write_reg(spi, CNF2, CNF2_BTLMODE |
(priv->can.ctrlmode & CAN_CTRLMODE_3_SAMPLES ?
CNF2_SAM : 0) |
((bt->phase_seg1 - 1) << CNF2_PS1_SHIFT) |
(bt->prop_seg - 1));
mcp251x_write_bits(spi, CNF3, CNF3_PHSEG2_MASK,
(bt->phase_seg2 - 1));
dev_err(&spi->dev, "CNF: 0x%02x 0x%02x 0x%02x\n",
mcp251x_read_reg(spi, CNF1),
mcp251x_read_reg(spi, CNF2),
mcp251x_read_reg(spi, CNF3));
return 0;
}
static int mcp251x_setup(struct net_device *net, struct mcp251x_priv *priv,
struct spi_device *spi)
{
mcp251x_do_set_bittiming(net);
mcp251x_write_reg(spi, RXBCTRL(0),
RXBCTRL_BUKT | RXBCTRL_RXM0 | RXBCTRL_RXM1);
mcp251x_write_reg(spi, RXBCTRL(1),
RXBCTRL_RXM0 | RXBCTRL_RXM1);
return 0;
}
static int mcp251x_hw_reset(struct spi_device *spi)
{
struct mcp251x_priv *priv = spi_get_drvdata(spi);
int ret;
unsigned long timeout;
priv->spi_tx_buf[0] = INSTRUCTION_RESET;
ret = spi_write(spi, priv->spi_tx_buf, 1);
if (ret) {
dev_err(&spi->dev, "reset failed: ret = %d\n", ret);
return -EIO;
}
/* Wait for reset to finish */
timeout = jiffies + HZ;
mdelay(10);
while ((mcp251x_read_reg(spi, CANSTAT) & CANCTRL_REQOP_MASK)
!= CANCTRL_REQOP_CONF) {
schedule();
if (time_after(jiffies, timeout)) {
dev_err(&spi->dev, "MCP251x didn't"
" enter in conf mode after reset\n");
return -EBUSY;
}
}
return 0;
}
static int mcp251x_hw_probe(struct spi_device *spi)
{
int st1, st2;
mcp251x_hw_reset(spi);
//stone added
printk(KERN_ERR "------mcp251x_hw_probe ------\n");
/*
* Please note that these are "magic values" based on after
* reset defaults taken from data sheet which allows us to see
* if we really have a chip on the bus (we avoid common all
* zeroes or all ones situations)
*/
st1 = mcp251x_read_reg(spi, CANSTAT) & 0xEE;
st2 = mcp251x_read_reg(spi, CANCTRL) & 0x17;
//stone
//dev_dbg(&spi->dev, "CANSTAT 0x%02x CANCTRL 0x%02x\n", st1, st2);
printk(KERN_ERR "CANSTAT 0x%02x CANCTRL 0x%02x\n", st1, st2);
/* Check for power up default values */
return (st1 == 0x80 && st2 == 0x07) ? 1 : 0;
}
static void mcp251x_open_clean(struct net_device *net)
{
struct mcp251x_priv *priv = netdev_priv(net);
struct spi_device *spi = priv->spi;
struct mcp251x_platform_data *pdata = spi->dev.platform_data;
free_irq(spi->irq, priv);
mcp251x_hw_sleep(spi);
if (pdata->transceiver_enable)
pdata->transceiver_enable(0);
close_candev(net);
}
static int mcp251x_stop(struct net_device *net)
{
struct mcp251x_priv *priv = netdev_priv(net);
struct spi_device *spi = priv->spi;
struct mcp251x_platform_data *pdata = spi->dev.platform_data;
close_candev(net);
priv->force_quit = 1;
free_irq(spi->irq, priv);
destroy_workqueue(priv->wq);
priv->wq = NULL;
mutex_lock(&priv->mcp_lock);
/* Disable and clear pending interrupts */
mcp251x_write_reg(spi, CANINTE, 0x00);
mcp251x_write_reg(spi, CANINTF, 0x00);
mcp251x_write_reg(spi, TXBCTRL(0), 0);
mcp251x_clean(net);
mcp251x_hw_sleep(spi);
if (pdata->transceiver_enable)
pdata->transceiver_enable(0);
priv->can.state = CAN_STATE_STOPPED;
mutex_unlock(&priv->mcp_lock);
can_led_event(net, CAN_LED_EVENT_STOP);
return 0;
}
static void mcp251x_error_skb(struct net_device *net, int can_id, int data1)
{
struct sk_buff *skb;
struct can_frame *frame;
skb = alloc_can_err_skb(net, &frame);
if (skb) {
frame->can_id |= can_id;
frame->data[1] = data1;
netif_rx_ni(skb);
} else {
netdev_err(net, "cannot allocate error skb\n");
}
}
static void mcp251x_tx_work_handler(struct work_struct *ws)
{
struct mcp251x_priv *priv = container_of(ws, struct mcp251x_priv,
tx_work);
struct spi_device *spi = priv->spi;
struct net_device *net = priv->net;
struct can_frame *frame;
//stone added log
dev_err(&spi->dev, "-----mcp251x_tx_work_handler-----");
mutex_lock(&priv->mcp_lock);
if (priv->tx_skb) {
if (priv->can.state == CAN_STATE_BUS_OFF) {
mcp251x_clean(net);
}
else
{
dev_err(&spi->dev, "-----mcp251x_tx_work_handler else-----");
frame = (struct can_frame *)priv->tx_skb->data;
if (frame->can_dlc > CAN_FRAME_MAX_DATA_LEN)
frame->can_dlc = CAN_FRAME_MAX_DATA_LEN;
mcp251x_hw_tx(spi, frame, 0);
priv->tx_len = 1 + frame->can_dlc;
can_put_echo_skb(priv->tx_skb, net, 0);
priv->tx_skb = NULL;
}
}
mutex_unlock(&priv->mcp_lock);
}
static void mcp251x_restart_work_handler(struct work_struct *ws)
{
struct mcp251x_priv *priv = container_of(ws, struct mcp251x_priv,
restart_work);
struct spi_device *spi = priv->spi;
struct net_device *net = priv->net;
mutex_lock(&priv->mcp_lock);
if (priv->after_suspend) {
mdelay(10);
mcp251x_hw_reset(spi);
mcp251x_setup(net, priv, spi);
if (priv->after_suspend & AFTER_SUSPEND_RESTART) {
mcp251x_set_normal_mode(spi);
} else if (priv->after_suspend & AFTER_SUSPEND_UP) {
netif_device_attach(net);
mcp251x_clean(net);
mcp251x_set_normal_mode(spi);
netif_wake_queue(net);
} else {
mcp251x_hw_sleep(spi);
}
priv->after_suspend = 0;
priv->force_quit = 0;
}
if (priv->restart_tx) {
priv->restart_tx = 0;
mcp251x_write_reg(spi, TXBCTRL(0), 0);
mcp251x_clean(net);
netif_wake_queue(net);
mcp251x_error_skb(net, CAN_ERR_RESTARTED, 0);
}
mutex_unlock(&priv->mcp_lock);
}
//stone modify isr to work
#if 0
static irqreturn_t mcp251x_can_isr(int irq, void *dev_id)
{
struct mcp251x_priv *priv = dev_id;
struct spi_device *spi = priv->spi;
struct net_device *net = priv->net;
dev_err(&spi->dev, "-----mcp251x_can_isr-----\n");
mutex_lock(&priv->mcp_lock);
while (!priv->force_quit) {
enum can_state new_state;
u8 intf, eflag;
u8 clear_intf = 0;
int can_id = 0, data1 = 0;
mcp251x_read_2regs(spi, CANINTF, &intf, &eflag);
/* mask out flags we don't care about */
intf &= CANINTF_RX | CANINTF_TX | CANINTF_ERR;
/* receive buffer 0 */
if (intf & CANINTF_RX0IF) {
mcp251x_hw_rx(spi, 0);
/*
* Free one buffer ASAP
* (The MCP2515 does this automatically.)
*/
if (mcp251x_is_2510(spi))
mcp251x_write_bits(spi, CANINTF, CANINTF_RX0IF, 0x00);
}
/* receive buffer 1 */
if (intf & CANINTF_RX1IF) {
mcp251x_hw_rx(spi, 1);
/* the MCP2515 does this automatically */
if (mcp251x_is_2510(spi))
clear_intf |= CANINTF_RX1IF;
}
/* any error or tx interrupt we need to clear? */
if (intf & (CANINTF_ERR | CANINTF_TX))
clear_intf |= intf & (CANINTF_ERR | CANINTF_TX);
if (clear_intf)
mcp251x_write_bits(spi, CANINTF, clear_intf, 0x00);
if (eflag)
mcp251x_write_bits(spi, EFLG, eflag, 0x00);
/* Update can state */
if (eflag & EFLG_TXBO) {
new_state = CAN_STATE_BUS_OFF;
can_id |= CAN_ERR_BUSOFF;
} else if (eflag & EFLG_TXEP) {
new_state = CAN_STATE_ERROR_PASSIVE;
can_id |= CAN_ERR_CRTL;
data1 |= CAN_ERR_CRTL_TX_PASSIVE;
} else if (eflag & EFLG_RXEP) {
new_state = CAN_STATE_ERROR_PASSIVE;
can_id |= CAN_ERR_CRTL;
data1 |= CAN_ERR_CRTL_RX_PASSIVE;
} else if (eflag & EFLG_TXWAR) {
new_state = CAN_STATE_ERROR_WARNING;
can_id |= CAN_ERR_CRTL;
data1 |= CAN_ERR_CRTL_TX_WARNING;
} else if (eflag & EFLG_RXWAR) {
new_state = CAN_STATE_ERROR_WARNING;
can_id |= CAN_ERR_CRTL;
data1 |= CAN_ERR_CRTL_RX_WARNING;
} else {
new_state = CAN_STATE_ERROR_ACTIVE;
}
/* Update can state statistics */
switch (priv->can.state) {
case CAN_STATE_ERROR_ACTIVE:
if (new_state >= CAN_STATE_ERROR_WARNING &&
new_state <= CAN_STATE_BUS_OFF)
priv->can.can_stats.error_warning++;
case CAN_STATE_ERROR_WARNING: /* fallthrough */
if (new_state >= CAN_STATE_ERROR_PASSIVE &&
new_state <= CAN_STATE_BUS_OFF)
priv->can.can_stats.error_passive++;
break;
default:
break;
}
priv->can.state = new_state;
if (intf & CANINTF_ERRIF) {
/* Handle overflow counters */
if (eflag & (EFLG_RX0OVR | EFLG_RX1OVR)) {
if (eflag & EFLG_RX0OVR) {
net->stats.rx_over_errors++;
net->stats.rx_errors++;
}
if (eflag & EFLG_RX1OVR) {
net->stats.rx_over_errors++;
net->stats.rx_errors++;
}
can_id |= CAN_ERR_CRTL;
data1 |= CAN_ERR_CRTL_RX_OVERFLOW;
}
mcp251x_error_skb(net, can_id, data1);
}
if (priv->can.state == CAN_STATE_BUS_OFF) {
if (priv->can.restart_ms == 0) {
priv->force_quit = 1;
can_bus_off(net);
mcp251x_hw_sleep(spi);
break;
}
}
if (intf == 0)
break;
if (intf & CANINTF_TX) {
net->stats.tx_packets++;
net->stats.tx_bytes += priv->tx_len - 1;
can_led_event(net, CAN_LED_EVENT_TX);
if (priv->tx_len) {
can_get_echo_skb(net, 0);
priv->tx_len = 0;
}
netif_wake_queue(net);
}
}
mutex_unlock(&priv->mcp_lock);
return IRQ_HANDLED;
}
#endif
static irqreturn_t mcp251x_can_isr(int irq, void *dev_id)
{
struct mcp251x_priv *priv = dev_id;
//stone added for debug
printk(KERN_ERR "----mcp251x_can_isr----\n");
disable_irq_nosync(irq);
if (!work_pending(&priv->irq_work))
queue_work(priv->wq, &priv->irq_work);
return IRQ_HANDLED;
}
void can_irq_work(struct work_struct *ws)
{
struct mcp251x_priv *priv = container_of(ws, struct mcp251x_priv,
irq_work);
struct spi_device *spi = priv->spi;
struct net_device *net = priv->net;
//stone added for debug
dev_err(&spi->dev, "Int lower half: can_irq_work\n");
mutex_lock(&priv->mcp_lock);
while (!priv->force_quit) {
enum can_state new_state;
u8 intf, eflag;
u8 clear_intf = 0;
int can_id = 0, data1 = 0;
mcp251x_read_2regs(spi, CANINTF, &intf, &eflag);
/* mask out flags we don't care about */
intf &= CANINTF_RX | CANINTF_TX | CANINTF_ERR ;//| CANINTF_MERRF;
//stone added for debug
printk(KERN_ERR "intf = %x\n", intf);
if (intf & CANINTF_TX) {
net->stats.tx_packets++;
net->stats.tx_bytes += priv->tx_len - 1;
if (priv->tx_len) {
can_get_echo_skb(net, 0);
priv->tx_len = 0;
}
netif_wake_queue(net);
}
/* receive buffer 1 */
if (intf & CANINTF_RX1IF) {
//stone added for debug
printk(KERN_ERR "receive buffer 1\n");
mcp251x_hw_rx(spi, 1);
/* the MCP2515 does this automatically */
if (mcp251x_is_2510(spi))
clear_intf |= CANINTF_RX1IF;
}
/* receive buffer 0 */
if (intf & CANINTF_RX0IF) {
//stone added for debug
printk(KERN_ERR "receive buffer 0\n");
mcp251x_hw_rx(spi, 0);
/*
* Free one buffer ASAP
* (The MCP2515 does this automatically.)
*/
if (mcp251x_is_2510(spi))
mcp251x_write_bits(spi, CANINTF, CANINTF_RX0IF, 0x00);
}
/* any error or tx interrupt we need to clear? */
if (intf & (CANINTF_ERR | CANINTF_TX))
clear_intf |= intf & (CANINTF_ERR | CANINTF_TX);
if (clear_intf)
mcp251x_write_bits(spi, CANINTF, clear_intf, 0x00);
if (eflag)
mcp251x_write_bits(spi, EFLG, eflag, 0x00);
/* Update can state */
if (eflag & EFLG_TXBO) {
new_state = CAN_STATE_BUS_OFF;
can_id |= CAN_ERR_BUSOFF;
} else if (eflag & EFLG_TXEP) {
new_state = CAN_STATE_ERROR_PASSIVE;
can_id |= CAN_ERR_CRTL;
data1 |= CAN_ERR_CRTL_TX_PASSIVE;
} else if (eflag & EFLG_RXEP) {
new_state = CAN_STATE_ERROR_PASSIVE;
can_id |= CAN_ERR_CRTL;
data1 |= CAN_ERR_CRTL_RX_PASSIVE;
} else if (eflag & EFLG_TXWAR) {
new_state = CAN_STATE_ERROR_WARNING;
can_id |= CAN_ERR_CRTL;
data1 |= CAN_ERR_CRTL_TX_WARNING;
} else if (eflag & EFLG_RXWAR) {
new_state = CAN_STATE_ERROR_WARNING;
can_id |= CAN_ERR_CRTL;
data1 |= CAN_ERR_CRTL_RX_WARNING;
} else {
new_state = CAN_STATE_ERROR_ACTIVE;
}
/* Update can state statistics */
switch (priv->can.state) {
case CAN_STATE_ERROR_ACTIVE:
if (new_state >= CAN_STATE_ERROR_WARNING &&
new_state <= CAN_STATE_BUS_OFF)
priv->can.can_stats.error_warning++;
case CAN_STATE_ERROR_WARNING: /* fallthrough */
if (new_state >= CAN_STATE_ERROR_PASSIVE &&
new_state <= CAN_STATE_BUS_OFF)
priv->can.can_stats.error_passive++;
break;
default:
break;
}
priv->can.state = new_state;
if (intf & CANINTF_ERRIF) {
/* Handle overflow counters */
if (eflag & (EFLG_RX0OVR | EFLG_RX1OVR)) {
if (eflag & EFLG_RX0OVR) {
net->stats.rx_over_errors++;
net->stats.rx_errors++;
}
if (eflag & EFLG_RX1OVR) {
net->stats.rx_over_errors++;
net->stats.rx_errors++;
}
can_id |= CAN_ERR_CRTL;
data1 |= CAN_ERR_CRTL_RX_OVERFLOW;
}
mcp251x_error_skb(net, can_id, data1);
}
if (priv->can.state == CAN_STATE_BUS_OFF) {
if (priv->can.restart_ms == 0) {
priv->force_quit = 1;
can_bus_off(net);
mcp251x_hw_sleep(spi);
break;
}
}
if (intf == 0)
break;
}
mutex_unlock(&priv->mcp_lock);
enable_irq(spi->irq);
}
static int mcp251x_open(struct net_device *net)
{
struct mcp251x_priv *priv = netdev_priv(net);
struct spi_device *spi = priv->spi;
struct mcp251x_platform_data *pdata = spi->dev.platform_data;
unsigned long flags;
int ret;
ret = open_candev(net);
if (ret) {
dev_err(&spi->dev, "unable to set initial baudrate!\n");
return ret;
}
//stone added log
dev_err(&spi->dev, "mcp251x_open-->open_candev");
mutex_lock(&priv->mcp_lock);
if (pdata->transceiver_enable)
pdata->transceiver_enable(1);
priv->force_quit = 0;
priv->tx_skb = NULL;
priv->tx_len = 0;
flags = IRQF_ONESHOT;
if (pdata->irq_flags)
flags |= pdata->irq_flags;
else
flags |= IRQF_TRIGGER_FALLING;
//中断处理接收
//stone added irq
spi->irq = gpio_to_irq(pdata->gpio_int1);
dev_err(&spi->dev, "Interrupt gpio=%d, irq=%d\n", pdata->gpio_int1, spi->irq);
if(spi->irq)
{
ret = request_threaded_irq(spi->irq, NULL, mcp251x_can_isr,
flags, DEVICE_NAME, priv);
if (ret) {
dev_err(&spi->dev, "failed to acquire irq %d\n", spi->irq);
if (pdata->transceiver_enable)
pdata->transceiver_enable(0);
close_candev(net);
goto open_unlock;
}
INIT_WORK(&priv->irq_work, can_irq_work);
}
priv->wq = create_freezable_workqueue("mcp251x_wq");
INIT_WORK(&priv->tx_work, mcp251x_tx_work_handler);
INIT_WORK(&priv->restart_work, mcp251x_restart_work_handler);
ret = mcp251x_hw_reset(spi);
//stone added log
dev_err(&spi->dev, "mcp251x_hw_reset");
if (ret) {
mcp251x_open_clean(net);
goto open_unlock;
}
ret = mcp251x_setup(net, priv, spi);
dev_err(&spi->dev, "mcp251x_setup");
if (ret) {
mcp251x_open_clean(net);
goto open_unlock;
}
ret = mcp251x_set_normal_mode(spi);
dev_err(&spi->dev, "mcp251x_set_normal_mode");
if (ret) {
mcp251x_open_clean(net);
goto open_unlock;
}
can_led_event(net, CAN_LED_EVENT_OPEN);
netif_wake_queue(net);
open_unlock:
mutex_unlock(&priv->mcp_lock);
return ret;
}
static const struct net_device_ops mcp251x_netdev_ops = {
.ndo_open = mcp251x_open,
.ndo_stop = mcp251x_stop,
.ndo_start_xmit = mcp251x_hard_start_xmit,
};
//stone added for int
#ifdef CONFIG_OF
static int mcp25625_parse_dt(struct device *dev,
struct mcp251x_platform_data *pdata)
{
#if 0
//u32 temp_val;
//int rc;
//rc = of_property_read_u32(np, "bosch,init-interval", &temp_val);
if (rc && (rc != -EINVAL)) {
dev_err(dev, "Unable to read init-interval\n");
return rc;
} else {
pdata->poll_interval = temp_val;
}
#endif
pdata->gpio_int1 = of_get_named_gpio_flags(dev->of_node,
"mcp25625,irq-gpio", 0, &pdata->int1_flag);
return 0;
}
#else
static int mcp25625_parse_dt(struct device *dev,
struct mcp251x_platform_data *pdata)
{
return -EINVAL;
}
#endif
static int mcp251x_can_probe(struct spi_device *spi)
{
struct net_device *net;
struct mcp251x_priv *priv;
//stone added
struct mcp251x_platform_data *pdata;
//struct mcp251x_platform_data *pdata = spi->dev.platform_data;
int ret = -ENODEV;
//这里platform_data都指到一起mcp251x_info
spi->dev.platform_data = &mcp251x_info;
pdata = spi->dev.platform_data;
if (spi->dev.of_node) {
ret = mcp25625_parse_dt(&spi->dev, pdata);
if (ret) {
dev_err(&spi->dev, "Failed to parse device tree\n");
ret = -EINVAL;
goto error_out;
}
}
//stone added for gpio int
{
if (!gpio_is_valid(pdata->gpio_int1)) {
dev_err(&spi->dev,
"gpio(%d) is invalid,\n", pdata->gpio_int1);
return -EINVAL;
}
ret = gpio_request(pdata->gpio_int1, "mscp25625_gpio_int");
if (ret) {
dev_err(&spi->dev,
"Unable to request gpio %d, err=%d\n",
pdata->gpio_int1, ret);
return ret;
}
ret = gpio_direction_input(pdata->gpio_int1);
if (ret) {
dev_err(&spi->dev,
"Unable to set gpio direction %d, err=%d\n",
pdata->gpio_int1, ret);
gpio_free(pdata->gpio_int1);
return ret;
}
}
//stone added
priv = kzalloc(sizeof(struct mcp251x_priv), GFP_KERNEL);
if (!priv) {
goto error_out;
}
mcp251x_enable_dma = 1;
spi_set_drvdata(spi, priv);
//data->client = client;
//data->dev = &client->dev;
printk(KERN_ERR "------mcp251x_can_probe------\n");
if (!pdata)
/* Platform data is required for osc freq */
goto error_out;
/* Allocate can/net device */
net = alloc_candev(sizeof(struct mcp251x_priv), TX_ECHO_SKB_MAX);
if (!net) {
ret = -ENOMEM;
goto error_alloc;
}
//stone added
printk(KERN_ERR "------mcp251x_can_probe1------\n");
net->netdev_ops = &mcp251x_netdev_ops;
net->flags |= IFF_ECHO;
priv = netdev_priv(net);
priv->can.bittiming_const = &mcp251x_bittiming_const;
priv->can.do_set_mode = mcp251x_do_set_mode;
priv->can.clock.freq = pdata->oscillator_frequency / 2;
priv->can.ctrlmode_supported = CAN_CTRLMODE_3_SAMPLES |
CAN_CTRLMODE_LOOPBACK | CAN_CTRLMODE_LISTENONLY;
priv->model = spi_get_device_id(spi)->driver_data;
priv->net = net;
spi_set_drvdata(spi, priv);
priv->spi = spi;
mutex_init(&priv->mcp_lock);
/* If requested, allocate DMA buffers */
if (mcp251x_enable_dma) {
spi->dev.coherent_dma_mask = ~0;
/*
* Minimum coherent DMA allocation is PAGE_SIZE, so allocate
* that much and share it between Tx and Rx DMA buffers.
*/
priv->spi_tx_buf = dma_alloc_coherent(&spi->dev,
PAGE_SIZE,
&priv->spi_tx_dma,
GFP_DMA);
if (priv->spi_tx_buf) {
priv->spi_rx_buf = (priv->spi_tx_buf + (PAGE_SIZE / 2));
priv->spi_rx_dma = (dma_addr_t)(priv->spi_tx_dma +
(PAGE_SIZE / 2));
} else {
/* Fall back to non-DMA */
mcp251x_enable_dma = 0;
}
}
/* Allocate non-DMA buffers */
if (!mcp251x_enable_dma) {
priv->spi_tx_buf = kmalloc(SPI_TRANSFER_BUF_LEN, GFP_KERNEL);
if (!priv->spi_tx_buf) {
ret = -ENOMEM;
goto error_tx_buf;
}
priv->spi_rx_buf = kmalloc(SPI_TRANSFER_BUF_LEN, GFP_KERNEL);
if (!priv->spi_rx_buf) {
ret = -ENOMEM;
goto error_rx_buf;
}
}
if (pdata->power_enable)
pdata->power_enable(1);
/* Call out to platform specific setup */
if (pdata->board_specific_setup)
pdata->board_specific_setup(spi);
SET_NETDEV_DEV(net, &spi->dev);
/* Configure the SPI bus */
spi->mode = SPI_MODE_0;
spi->bits_per_word = 8;
spi_setup(spi);
/* Here is OK to not lock the MCP, no one knows about it yet */
if (!mcp251x_hw_probe(spi)) {
dev_info(&spi->dev, "Probe failed\n");
goto error_probe;
}
mcp251x_hw_sleep(spi);
if (pdata->transceiver_enable)
pdata->transceiver_enable(0);
ret = register_candev(net);
if (ret)
goto error_probe;
devm_can_led_init(net);
dev_info(&spi->dev, "probed\n");
//stone added
printk(KERN_ERR "------mcp251x_can_probe OK------\n");
return ret;
error_probe:
if (!mcp251x_enable_dma)
kfree(priv->spi_rx_buf);
error_rx_buf:
if (!mcp251x_enable_dma)
kfree(priv->spi_tx_buf);
error_tx_buf:
free_candev(net);
if (mcp251x_enable_dma)
dma_free_coherent(&spi->dev, PAGE_SIZE,
priv->spi_tx_buf, priv->spi_tx_dma);
error_alloc:
if (pdata->power_enable)
pdata->power_enable(0);
dev_err(&spi->dev, "probe failed\n");
//stone added
printk(KERN_ERR "------mcp251x_can_probe err------\n");
error_out:
return ret;
}
static int mcp251x_can_remove(struct spi_device *spi)
{
struct mcp251x_platform_data *pdata = spi->dev.platform_data;
struct mcp251x_priv *priv = spi_get_drvdata(spi);
struct net_device *net = priv->net;
unregister_candev(net);
free_candev(net);
if (mcp251x_enable_dma) {
dma_free_coherent(&spi->dev, PAGE_SIZE,
priv->spi_tx_buf, priv->spi_tx_dma);
} else {
kfree(priv->spi_tx_buf);
kfree(priv->spi_rx_buf);
}
if (pdata->power_enable)
pdata->power_enable(0);
return 0;
}
#ifdef CONFIG_PM_SLEEP
static int mcp251x_can_suspend(struct device *dev)
{
struct spi_device *spi = to_spi_device(dev);
struct mcp251x_platform_data *pdata = spi->dev.platform_data;
struct mcp251x_priv *priv = spi_get_drvdata(spi);
struct net_device *net = priv->net;
priv->force_quit = 1;
disable_irq(spi->irq);
/*
* Note: at this point neither IST nor workqueues are running.
* open/stop cannot be called anyway so locking is not needed
*/
if (netif_running(net)) {
netif_device_detach(net);
mcp251x_hw_sleep(spi);
if (pdata->transceiver_enable)
pdata->transceiver_enable(0);
priv->after_suspend = AFTER_SUSPEND_UP;
} else {
priv->after_suspend = AFTER_SUSPEND_DOWN;
}
if (pdata->power_enable) {
pdata->power_enable(0);
priv->after_suspend |= AFTER_SUSPEND_POWER;
}
return 0;
}
static int mcp251x_can_resume(struct device *dev)
{
struct spi_device *spi = to_spi_device(dev);
struct mcp251x_platform_data *pdata = spi->dev.platform_data;
struct mcp251x_priv *priv = spi_get_drvdata(spi);
if (priv->after_suspend & AFTER_SUSPEND_POWER) {
pdata->power_enable(1);
queue_work(priv->wq, &priv->restart_work);
} else {
if (priv->after_suspend & AFTER_SUSPEND_UP) {
if (pdata->transceiver_enable)
pdata->transceiver_enable(1);
queue_work(priv->wq, &priv->restart_work);
} else {
priv->after_suspend = 0;
}
}
priv->force_quit = 0;
enable_irq(spi->irq);
return 0;
}
#endif
static SIMPLE_DEV_PM_OPS(mcp251x_can_pm_ops, mcp251x_can_suspend,
mcp251x_can_resume);
//stone added mcp25625
static const struct spi_device_id mcp251x_id_table[] = {
//{ "mcp2510", CAN_MCP251X_MCP2510 },
//{ "mcp2515", CAN_MCP251X_MCP2515 },
//{ },
{"mcp25625", 0},
};
MODULE_DEVICE_TABLE(spi, mcp251x_id_table);
//stone added mcp251x_of_match
static const struct of_device_id mcp251x_of_match[] = {
{ .compatible = "mcp25625", },
{ },
};
static struct spi_driver mcp251x_can_driver = {
.driver = {
.owner = THIS_MODULE,
.name = DEVICE_NAME,
.pm = &mcp251x_can_pm_ops,
//stone added
.of_match_table = mcp251x_of_match,
},
.id_table = mcp251x_id_table,
.probe = mcp251x_can_probe,
.remove = mcp251x_can_remove,
};
//stone added
#if 1
static int __init mcp251x_init(void)
{
return spi_register_driver(&mcp251x_can_driver);
}
static void __exit mcp251x_exit(void)
{
spi_unregister_driver(&mcp251x_can_driver);
}
module_init(mcp251x_init);
module_exit(mcp251x_exit);
#else
module_spi_driver(mcp251x_can_driver);
#endif
MODULE_AUTHOR("Chris Elston <[email protected]>");
MODULE_DESCRIPTION("Microchip 251x CAN driver");
MODULE_LICENSE("GPL v2");
由于没有找到CAN分析仪来验证,找了一块stm32的开发板,自己写了个简单的测试程序,main程序参考如下:
/****************************************Copyright (c)****************************************************
**
** http://www.powermcu.com
**
**--------------File Info---------------------------------------------------------------------------------
** File name: main.c
** Descriptions: The CAN-BUS application function
**
**--------------------------------------------------------------------------------------------------------
** Created by: AVRman
** Created date: 2010-10-30
** Version: v1.0
** Descriptions: The original version
**
**--------------------------------------------------------------------------------------------------------
** Modified by:
** Modified date:
** Version:
** Descriptions:
**
*********************************************************************************************************/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
#include "systick.h"
#include <stdlib.h>
#include <stdio.h>
#ifdef __GNUC__
/* With GCC/RAISONANCE, small printf (option LD Linker->Libraries->Small printf
set to 'Yes') calls __io_putchar() */
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif /* __GNUC__ */
/* Private variables ---------------------------------------------------------*/
uint16_t CAN_ID;
uint8_t CAN_DATA0,CAN_DATA1,CAN_DATA2,CAN_DATA3,CAN_DATA4,CAN_DATA5,CAN_DATA6,CAN_DATA7;
uint8_t CanFlag,Display;
/* Private function prototypes -----------------------------------------------*/
void GPIO_Configuration(void);
void USART_Configuration(void);
void NVIC_Configuration(void);
void CAN_Configuration(void);
void CanWriteData(uint16_t ID);
/*******************************************************************************
* Function Name : main
* Description : Main program
* Input : None
* Output : None
* Return : None
* Attention : None
*******************************************************************************/
int main(void)
{
delay_init();
CAN_Configuration();
USART_Configuration();
printf("\r\n");
printf("*****************************************************************\r\n");
printf("* *\r\n");
printf("* Thank you for using HY-RedBull V3.0 Development Board !^_^ *\r\n");
printf("* *\r\n");
printf("*****************************************************************\r\n");
printf("CAN-Bus Test \r\n");
printf("CAN-Bus Speed 500kHz \r\n");
GPIO_SetBits(GPIOA , GPIO_Pin_7); //LED1 off
GPIO_SetBits(GPIOA , GPIO_Pin_6); //LED2 off
GPIO_SetBits(GPIOA , GPIO_Pin_5); //LED3 off
GPIO_SetBits(GPIOA , GPIO_Pin_4); //LED4 off
/* Infinite loop */
while (1)
{
if( CanFlag == ENABLE )
{
CanFlag = DISABLE;
printf("CAN Received Data \r\n");
printf("CAN ID %x \r\n",CAN_ID);
printf("CAN_DATA0 %x \r\n",CAN_DATA0);
printf("CAN_DATA1 %x \r\n",CAN_DATA1);
printf("CAN_DATA2 %x \r\n",CAN_DATA2);
printf("CAN_DATA3 %x \r\n",CAN_DATA3);
printf("CAN_DATA4 %x \r\n",CAN_DATA4);
printf("CAN_DATA5 %x \r\n",CAN_DATA5);
printf("CAN_DATA6 %x \r\n",CAN_DATA6);
printf("CAN_DATA7 %x \r\n",CAN_DATA7);
}
CanWriteData(0x88);
if( Display )
{
/*====LED-ON=======*/
GPIO_ResetBits(GPIOA , GPIO_Pin_7);
//GPIO_ResetBits(GPIOA , GPIO_Pin_6);
//GPIO_ResetBits(GPIOA , GPIO_Pin_5);
//GPIO_ResetBits(GPIOA , GPIO_Pin_4);
}
else
{
/*====LED-OFF=======*/
GPIO_SetBits(GPIOA , GPIO_Pin_7);
//GPIO_SetBits(GPIOA , GPIO_Pin_6);
//GPIO_SetBits(GPIOA , GPIO_Pin_5);
//GPIO_SetBits(GPIOA , GPIO_Pin_4);
}
Display = ~Display;
delay_ms(500); /* delay 200ms */
}
}
/*******************************************************************************
* Function Name : GPIO_Configuration
* Description : Configures the different GPIO ports.
* Input : None
* Output : None
* Return : None
* Attention : None
*******************************************************************************/
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* CAN Periph clock enable */
//stone comment :RCC_APB2Periph_GPIOA must add for config GPIOA
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO ,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
//Begin:stone added
/* Enable GPIO clock */
//RCC_APB2PeriphClockCmd(CAN_TX_GPIO_CLK|CAN_RX_GPIO_CLK, ENABLE);
//End:stone added
GPIO_PinRemapConfig(GPIO_Remap1_CAN1,ENABLE);
/* Configure CAN pin: RX PB8 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Configure CAN pin: TX PB9*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/**
* LED1 -> PA7 , LED2 -> PA6 , LED3 -> PA5 , LED4 -> PA4
*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_6 | GPIO_Pin_5 | GPIO_Pin_4;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
/*******************************************************************************
* Function Name : NVIC_Configuration
* Description : Configures the nested vectored interrupt controller.
* Input : None
* Output : None
* Return : None
* Attention : None
*******************************************************************************/
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Enable CAN1 RX0 interrupt IRQ channel */
NVIC_InitStructure.NVIC_IRQChannel = USB_LP_CAN1_RX0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/*******************************************************************************
* Function Name : USART_Configuration
* Description : Configure USART1
* Input : None
* Output : None
* Return : None
* Attention : None
*******************************************************************************/
void USART_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1,ENABLE);
/*
* USART1_TX -> PA9 , USART1_RX -> PA10
*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_ITConfig(USART1, USART_IT_TXE, ENABLE);
USART_Cmd(USART1, ENABLE);
}
/*******************************************************************************
* Function Name : CAN_Configuration
* Description : Configures the CAN
* Input : None
* Output : None
* Return : None
* Attention : None
*******************************************************************************/
void CAN_Configuration(void)
{
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
NVIC_Configuration();
GPIO_Configuration();
/* CAN register init */
CAN_DeInit(CAN1);
CAN_StructInit(&CAN_InitStructure);
/* CAN cell init */
CAN_InitStructure.CAN_TTCM = DISABLE; /* 时间触发禁止, 时间触发:CAN硬件的内部定时器被激活,并且被用于产生时间戳 */
CAN_InitStructure.CAN_ABOM = DISABLE; /* 自动离线禁止,自动离线:一旦硬件监控到128次11个隐性位,就自动退出离线状态。在这里要软件设定后才能退出 */
CAN_InitStructure.CAN_AWUM = ENABLE; /* 自动唤醒禁止,有报文来的时候自动退出休眠 */
CAN_InitStructure.CAN_NART = DISABLE; /* 报文重传, 如果错误一直传到成功止,否则只传一次 */
CAN_InitStructure.CAN_RFLM = DISABLE; /* 接收FIFO锁定, 1--锁定后接收到新的报文摘不要,0--接收到新的报文则覆盖前一报文 */
CAN_InitStructure.CAN_TXFP = ENABLE; /* 发送优先级 0---由标识符决定 1---由发送请求顺序决定 */
CAN_InitStructure.CAN_Mode = CAN_Mode_Normal; /* 模式 */
CAN_InitStructure.CAN_SJW = CAN_SJW_2tq; /* 重新同步跳宽,只有can硬件处于初始化模式时才能访问这个寄存器 */
CAN_InitStructure.CAN_BS1 = CAN_BS1_5tq; /* 时间段1 */
CAN_InitStructure.CAN_BS2 = CAN_BS2_3tq; /* 时间段2 */
//CAN_InitStructure.CAN_Prescaler = 45; /* 波特率预分频数 */
CAN_InitStructure.CAN_Prescaler = 12; /* 波特率预分频数 stone modify to 500K*/
/*注意:12M的晶振配置为5 3 12才能得到500Kbps 比较奇怪*/
/* 波特率计算方法 CAN 时钟频率为 APB1 = 36 MHz */
/* CANbps= Fpclk/((BRP+1)*((Tseg1+1)+(Tseg2+1)+1) 此处计算为 CANbps=36000000/(45*(4+3+1))=100kHz */ //此处Tseg1+1 = CAN_BS1_8tp
/* 配置大方向: Tseg1>=Tseg2 Tseg2>=tq; Tseg2>=2TSJW */
if (CAN_Init(CAN1,&CAN_InitStructure) == CANINITFAILED)
{
/* 初始化时先设置CAN_MCR的初始化位 */
/* 然后查看硬件是否真的设置了CAN_MSR的初始化位来确认是否进入了初始化模式 */
}
/* 配置CAN过滤器 */
/* 32位对应的id */
/* stdid[10:0],extid[17:0],ide,rtr */
/* 16位对应的id */
/* stdid[10:0],ide,rtr,extid[17:15] */
/* 一般使用屏蔽模式 */
/* 要注意的是fifo接收存满了中断,还有就是fifo的概念,即取的一直是最早那一个数据, 要释放才能取下一个数据 */
/* 常使用的中断有 */
/* 1,有信息中断,即fifo挂号中断 */
/* 2,fifo满中断 */
/* 3,fifo满之后又有信息来则中断,即fifo溢出中断 */
CAN_FilterInitStructure.CAN_FilterNumber=0; /* 过滤器0 */
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask; /* 屏敝模式 */
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; /* 32位 */
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000; /* 以下四个都为0, 表明不过滤任何id */
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=0; /* 能够通过该过滤器的报文存到fifo0中 */
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;
CAN_ITConfig(CAN1,CAN_IT_FMP0, ENABLE); /* 挂号中断, 进入中断后读fifo的报文函数释放报文清中断标志 */
CAN_FilterInit(&CAN_FilterInitStructure);
}
/*******************************************************************************
* Function Name : CanWriteData
* Description : Can Write Date to CAN-BUS
* Input : None
* Output : None
* Return : None
* Attention : None
*******************************************************************************/
void CanWriteData(uint16_t ID)
{
CanTxMsg TxMessage;
CAN_DATA0=rand()%0xff; CAN_DATA1=rand()%0xff;
CAN_DATA2=rand()%0xff; CAN_DATA3=rand()%0xff;
CAN_DATA4=rand()%0xff; CAN_DATA5=rand()%0xff;
CAN_DATA6=rand()%0xff; CAN_DATA7=rand()%0xff;
/* transmit */
TxMessage.StdId = ID; /* 设置标准id 注意标准id的最高7位不能全是隐性(1)。共11位 */
//TxMessage.ExtId = 0x00; //设置扩展id 扩展id共18位
TxMessage.RTR = CAN_RTR_DATA; /* 设置为数据帧 */
TxMessage.IDE = CAN_ID_STD; /* 使用标准id */
TxMessage.DLC = 8; /* 数据长度, can报文规定最大的数据长度为8字节 */
TxMessage.Data[0] = CAN_DATA0;
TxMessage.Data[1] = CAN_DATA1;
TxMessage.Data[2] = CAN_DATA2;
TxMessage.Data[3] = CAN_DATA3;
TxMessage.Data[4] = CAN_DATA4;
TxMessage.Data[5] = CAN_DATA5;
TxMessage.Data[6] = CAN_DATA6;
TxMessage.Data[7] = CAN_DATA7;
CAN_Transmit(CAN1,&TxMessage); /* 返回这个信息请求发送的邮箱号0,1,2或没有邮箱申请发送no_box */
}
/*******************************************************************************
* Function Name : USB_LP_CAN1_RX0_IRQHandler
* Description : This function handles USB Low Priority or CAN RX0 interrupts
* Input : None
* Output : None
* Return : None
* Attention : None
*******************************************************************************/
void USB_LP_CAN1_RX0_IRQHandler(void)
{
CanRxMsg RxMessage;
CAN_Receive(CAN1,CAN_FIFO0, &RxMessage); /* 此函数包含释放提出报文了的,在非必要时,不需要自己释放 */
CAN_ID=RxMessage.StdId;
CAN_DATA0=RxMessage.Data[0];
CAN_DATA1=RxMessage.Data[1];
CAN_DATA2=RxMessage.Data[2];
CAN_DATA3=RxMessage.Data[3];
CAN_DATA4=RxMessage.Data[4];
CAN_DATA5=RxMessage.Data[5];
CAN_DATA6=RxMessage.Data[6];
CAN_DATA7=RxMessage.Data[7];
CAN_ClearITPendingBit(CAN1,CAN_IT_FMP0); /* 清除挂起中断 */
CanFlag = ENABLE;
}
/**
* @brief Retargets the C library printf function to the USART.
* @param None
* @retval None
*/
PUTCHAR_PROTOTYPE
{
/* Place your implementation of fputc here */
/* e.g. write a character to the USART */
USART_SendData(USART1, (uint8_t) ch);
/* Loop until the end of transmission */
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)
{}
return ch;
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif
/*********************************************************************************************************
END FILE
*********************************************************************************************************/
在Android侧还需要找个apk去设置CAN参数来通讯,懒得去写apk了。参考网上的例子简单写了个可执行程序运行验证是否正确:
/*
* can_test_send_and_dump.c
*
* Created on: 2018-8-25
* Author: tanghanyue
*/
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main(int argc, char *argv[])
{
int s, nbytes;
unsigned char number=0;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
struct can_frame frame_send;
struct can_filter rfilter[1];
pid_t pid = -1;
int i;
/* handle (optional) flags first */
if(argc != 2) {
fprintf(stderr, "Usage: %s <-r> <can interface name> for receiving\nor <-s> <can interface name> for sending\n", argv[0]);
exit(1);
}
/* create socket */
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0)
{
perror("Create socket failed");
exit(-1);
}
/* set up can interface */
strcpy(ifr.ifr_name, argv[1]);
printf("can port is %s\n",ifr.ifr_name);
/* assign can device */
ioctl(s, SIOCGIFINDEX, &ifr);
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
/* bind can device */
if(bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0)
{
perror("Bind can device failed\n");
close(s);
exit(-2);
}
pid = fork();
if(pid == -1)
{
perror("\n\tfailed to fork!!\n\n");
return -1;
}
else if(pid==0)/* configure receiving can data*/
{
/* set filter for only receiving packet with can id 0x88 */
rfilter[0].can_id = 0x88;
rfilter[0].can_mask = CAN_SFF_MASK;
if(setsockopt(s, SOL_CAN_RAW, CAN_RAW_FILTER, &rfilter, sizeof(rfilter)) < 0)
{
perror("set receiving filter error\n");
close(s);
exit(-3);
}
/* keep reading */
while(1)
{
nbytes = read(s, &frame, sizeof(frame));
if(nbytes > 0)
{
printf("read datas:%s ID=%#x data length=%d\n", ifr.ifr_name, frame.can_id, frame.can_dlc);
for ( i=0; i < frame.can_dlc; i++)
printf("%#x ", frame.data[i]);
printf("\n");
}
printf("read can data over\n");
}
}/* configure sending can data*/
else
{
while(1)
{
/* configure can_id and can data length */
frame_send.can_id = 0x88;
frame_send.can_dlc = 8;
printf("%s ID=%#x data length=%d\n", ifr.ifr_name, frame_send.can_id, frame_send.can_dlc);
/* prepare data for sending: 0x11,0x22...0x88 */
for (i=0; i<8; i++)
{
frame_send.data[i] = ((i+1)<<4) | (i+1);
frame_send.data[7] =number;
printf("%#x ", frame_send.data[i]);
}
printf("success to Sent out\n");
/* Sending data */
if(write(s, &frame_send, sizeof(frame_send)) < 0)
{
perror("Send failed");
close(s);
exit(-4);
}
sleep(1);
number++;
}
}
close(s);
return 0;
}
把两块板子的CAN总线连接在一起,验证和stm32可以正常通讯,中断log如下:
[ 105.920481] ----mcp251x_can_isr----
[ 105.923041] mcp25625 spi4.0: Int lower half: can_irq_work
[ 105.928635] intf = 1
[ 105.930614] receive buffer 0
[ 105.933581] mcp25625 spi4.0: buf_idx=0
[ 105.937203] mcp25625 spi4.0: buf[0]=ff
[ 105.942904] mcp25625 spi4.0: buf[1]=11
[ 105.945622] mcp25625 spi4.0: buf[2]=0
[ 105.949728] mcp25625 spi4.0: buf[3]=ff
[ 105.953206] mcp25625 spi4.0: buf[4]=57
[ 105.960300] mcp25625 spi4.0: buf[5]=8
[ 105.962932] mcp25625 spi4.0: buf[6]=5d
[ 105.966664] mcp25625 spi4.0: buf[7]=e3
[ 105.971056] mcp25625 spi4.0: buf[8]=4c
[ 105.974610] mcp25625 spi4.0: buf[9]=cf
[ 105.978517] mcp25625 spi4.0: buf[10]=60
[ 105.981858] mcp25625 spi4.0: buf[11]=1
[ 105.986312] mcp25625 spi4.0: buf[12]=7a
[ 105.990031] mcp25625 spi4.0: buf[13]=16
[ 105.993205] intf = 0
至此调试完成。