ROS 中 boost::bind( ) 的使用
1. boost::bind( )使用方法
定义如下函数:
int f(int a, int b)
{
return a + b;
}
int g(int a, int b, int c)
{
return a + b + c;
}
boost::bind(f, 1, 2)可以产生一个无参函数对象,返回f(1, 2);类似的,boost::bind(g, 1, 2, 3)相当于g(1, 2, 3)
其中boost::bind()中使用较为频繁的还有占位符:
如:boost::bind(f, _1, 5) (x) 中,_1就是一个占位符,其位于f函数形参的第一形参 int a 的位置,5位于第二形参 int b 的位置;
_1 表示(x)参数列表的第一个参数;所以,boost::bind(f, _1, 5) (x) 相当于 f(x ,5)。再看下面这些例子:
boost::bind(f, _2, _1)(x, y); //相当于f(y,x),即_2表示后面参数列表的第二个位置:y
boost::bind(g, _1, 9, _1)(x); //相当于g(x, 9, x)
boost::bind(g, _3, _3, _3)(x, y, z); //相当于g(z, z, z)
2. ROS中boost::bind( )常见用法
ROS编程过程中,有许多需要给回调函数传递多个参数的情况,下面结合实例进行简单总结一下:
2.1 回调函数仅单个参数
#include <ros/ros.h>
#include <turtlesim/Pose.h>
void callback(const turtlesim::PoseConstPtr& msg) //单个参数为:消息类型为turtlesim::Pose的常量指针msg
{
float pose_x;
pose_x = msg->x;
ROS_INFO("x = [%f]",pose_x); //打印出小乌龟所在的x坐标
}
2.2 回调函数含多个参数
#include <ros/ros.h>
#include <turtlesim/Pose.h>
void callback(const turtlesim::PoseConstPtr& msg, int x, int y) //三个参数:常量指针msg、x、y
{
float pose_x;
pose_x = msg->x;
ROS_INFO("x = [%f]",pose_x); //打印出小乌龟所在的x坐标
ROS_INFO("input_x = [%i] ; input_y = [%i]", x, y); //打印出输入的参数x、y
}
2.3 主函数
int input_x = 1;
int input_y = 2;
int main(int argc, char** argv)
{
ros::init(argc, argv, "test");
ros::NodeHandle n;
ros::Subscriber pose_sub = n.subscribe<turtlesim::Pose>("/turtle1/pose", 10, callback);
//回调函数为单个参数时,这里直接使用callback,传递的单个参数为:接收话题名为/turtle1/pose中的内容;
//ros::Subscriber pose_sub = n.subscribe<turtlesim::Pose>("/turtle1/pose", 10, boost::bind(&callback, _1, input_x, input_y));
//这里回调函数为三个参数时,使用boost::bind(&callback, _1, input_x, input_y),这里_1即为占位符,为subscriber接收到的/turtle1/pose话题中的内容占位;相当于callback(turtlesim::PoseConst& msg, input_x, input_y)
ros::Rate loop_rate(1);
int i=1;
while(i<=3)
{
ros::spinOnce();
loop_rate.sleep();
i++;
}
return 0;
}
3.运行示例
3.1 完整代码
#include <ros/ros.h>
#include <turtlesim/Pose.h>
int input_x = 1;
int input_y = 2;
void callback(const turtlesim::PoseConstPtr& msg, int x, int y)
{
float pose_x;
pose_x = msg->x;
ROS_INFO("x = [%f]",pose_x);
ROS_INFO("input_x = [%i] ; input_y = [%i]", x, y);
}
void callback(const turtlesim::PoseConstPtr& msg)
{
float pose_x;
pose_x = msg->x;
ROS_INFO("x = [%f]",pose_x);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "test");
ros::NodeHandle n;
ros::Subscriber pose_sub = n.subscribe<turtlesim::Pose>("/turtle1/pose", 10, boost::bind(&callback, _1, input_x, input_y));
//ros::Subscriber pose_sub = n.subscribe<turtlesim::Pose>("/turtle1/pose", 10, callback);
ros::Rate loop_rate(1);
int i=1;
while(i<=3)
{
ros::spinOnce();
loop_rate.sleep();
i++;
}
return 0;
}
3.2 运行结果
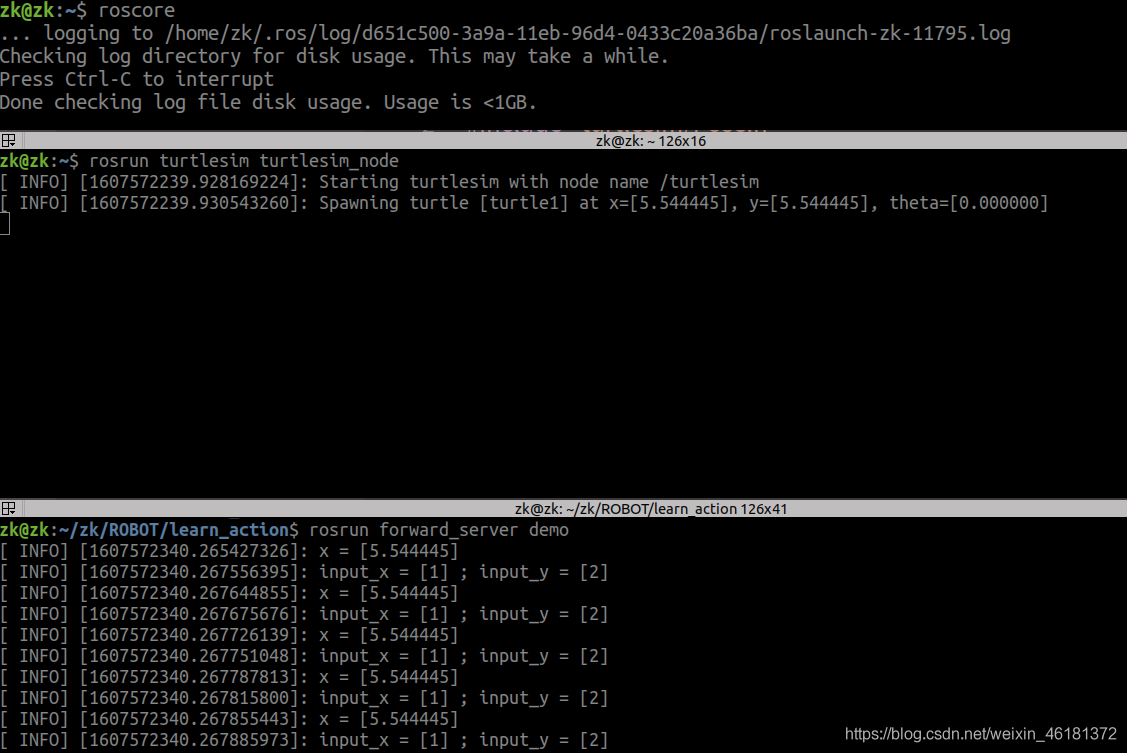
终端中分别打印出了小乌龟所在的X坐标,以及我们代码中定义的input_x,input_y。