此博文主要是用来记录ROS-Kinetic 中,用于机器人轨迹规划的MoveIt功能包的学习记录。
引: Commander Scripting: 在Moveit官方教程中,规定了可以使用命令行来控制RVIZ中机器人模型,执行特定位姿态和执行相应轨迹。并且能够查看当前机器人坐标等信息,主要功能是在真正控制真实机器人运动之前进行运动仿真。
注意:这个教程是基于Moveit教程中的一个Tutorial 的Python脚本实现的,所以在实际项目的应用方法和编程方法,需要后期在深入研究。
Step1: 首先打开两个命令行,分别执行这个Launch文件和Python脚本:
roslaunch panda_moveit_config demo.launch
rosrun moveit_commander moveit_commander_cmdline.pyStep2: 制定通过命令行控制的MoveGroup名称,然后通过current指令,可以查看当前机器人状态
use <panda_arm>
current 
Step3: 生命一个变量C,并将当前机器人状态存储在c中
rec cStep4: 之后可以首先将存放在变量C中的机器人状态转存到goal内,并且修改goal的元素,来修改机器人的目标位置,然后使用go 指令,控制机器人仿真
goal = c
goal[0] = 0.2
go goal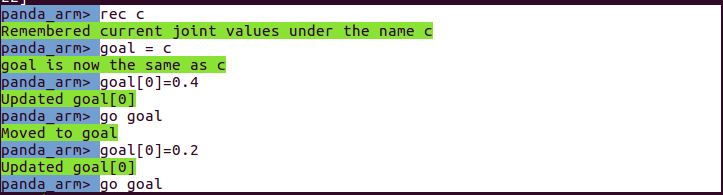
Step5: 设定一个新的goal目标位姿态,使用plan和execute指令,进行轨迹规划+执行
goal[0] = 0.2
goal[1] = 0.2
plan goal
execute