Floyd判圈算法(Floyd Cycle Detection Algorithm),又称龟兔赛跑算法(Tortoise and Hare Algorithm)。可用于判定链表、迭代函数、有限状态机中是否有环。如果有环,可以找出环的起点,求出环的长度。
基本思想:利用了快慢指针的思想。两个人在赛跑,A速度快,B速度慢,若是存在环(勺状图),A和B总是会相遇的,相遇时A所经过的路径的长度要比B多若干个环的长度。
- 算法时间复杂度:令S到P的距离为m,环的长度为n,时间复杂度O(m+n),即O(n);
- 空间复杂度:O(1);
1. 判定是否存在环
使用两个指针,一个慢指针(龟)每次前进一步,快指针(兔)指针每次前进两步(两步或多步效果等价,只要一个比另一个快就行。但如果移动步数增加,算法的复杂度可能增加)。如果两者在链表头以外(不包含开始情况)的某一点相遇(即相等),那么链表有环;如果(快指针)到达了链表的结尾(存在结尾,一定无环),那么没环。
例题传送门:力扣141. 环形链表
/**
* Definition for singly-linked list.
* struct ListNode {
* int val;
* ListNode *next;
* ListNode(int x) : val(x), next(NULL) {}
* };
*/
class Solution {
public:
bool hasCycle(ListNode *head) {
if(head == nullptr) return false;
ListNode *slow=head, *fast=head->next;
while(fast != nullptr && fast->next != nullptr) {
if(slow == fast) return true;
slow = slow->next;
fast = fast->next->next;
}
return false;
}
};
2. 环的长度
在求得有环的基础上,可以求环的长度 C C C。令快指针fast不动,慢指针slow向后遍历节点,再次和fast指针相等时,统计慢指针slow推进的步数,就是环的长度。
class Solution {
public:
int cycleLen(ListNode* head) {
ListNode* meetPnt = hasCycle(head);
if(meetPnt == nullptr) return 0;
ListNode* travelPnt = meetPnt->next;
int cycleSize = 1;
while(travelPnt != meetPnt) {
travelPnt = travelPnt->next;
cycleSize++;
}
return cycleSize;
}
private:
ListNode* hasCycle(ListNode *head) {
if(head == nullptr) return nullptr;
ListNode *slow=head, *fast=head->next;
while(fast != nullptr && fast->next != nullptr) {
if(slow == fast) return slow;
slow = slow->next;
fast = fast->next->next;
}
return nullptr;
}
};
3.环的起点
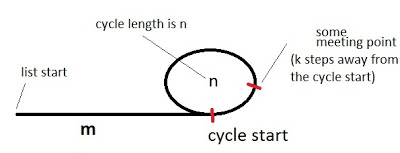
假设出发起点到环起点的距离为 m m m,已经确定有环,且环的长度 n n n 经上已求得。第一次相遇的起点距离环的距离为 k k k。那么当两者相遇时,慢指针在时间 t t t移动的总距离为 t = m + a ∗ n + k t = m + a *n + k t=m+a∗n+k,快指针在相同时间移动的总距离为 2 t = m + b ∗ n + k 2t = m + b*n + k 2t=m+b∗n+k,其中 a a a 和 b b b 分别为慢快指针在首次相遇时走的环的圈数。那么有 t = ( b − a ) ∗ n t = (b - a) * n t=(b−a)∗n, 即 t t t 和 m + k m+k m+k 是环的长度的倍数。
为了找到环的起点,一个指针回到链表起点 S S S,另一指针在当前首次相遇位置 M M M。同时向前,步幅为1,他们再次相遇一定在环的起点。因为从链表起点 S S S 到环的起点 P P P 的距离是 m m m,从 P P P 到 首次相遇点 M M M 的距离是 k k k,因为 m + k m+k m+k 是环长的整数倍,所以当从起点出发的指针走过距离 m m m 的时候,另一指针也一定达到了 P P P 点(同时差k步到达首次相遇点)。