赛题背景
赛题链接
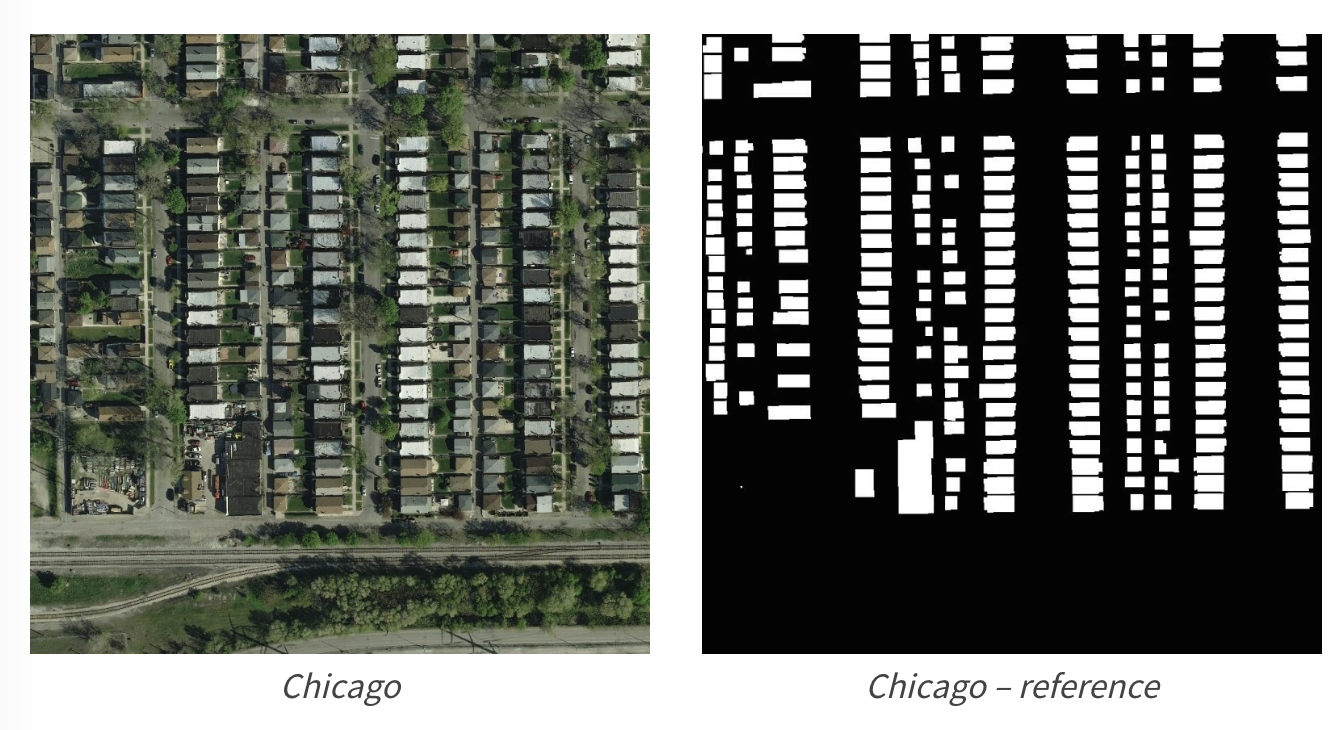
遥感技术已成为获取地表覆盖信息最为行之有效的手段,遥感技术已经成功应用于地表覆盖检测、植被面积检测和建筑物检测任务。本赛题使用航拍数据,需要参赛选手完成地表建筑物识别,将地表航拍图像素划分为有建筑物和无建筑物两类。
如下图,左边为原始航拍图,右边为对应的建筑物标注。
引入库
import numpy as np
import pandas as pd
import pathlib, sys, os, random, time
import cv2, gc
from tqdm import tqdm_notebook
import matplotlib.pyplot as plt
%matplotlib inline
import warnings
warnings.filterwarnings('ignore')
from tqdm.notebook import tqdm
import albumentations as A
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.data as D
import torchvision
from torchvision import transforms as T
数据分析
赛题数据为航拍图,需要识别图片中的地表建筑具体像素位置。
- train_mask.csv:存储图片的标注的rle编码;
- train和test文件夹:存储训练集和测试集图片;
rle编码的具体的读取代码如下:
# 将图片编码为rle格式
def rle_encode(im):
'''
im: numpy array, 1 - mask, 0 - background
Returns run length as string formated
'''
pixels = im.flatten(order = 'F')
pixels = np.concatenate([[0], pixels, [0]])
runs = np.where(pixels[1:] != pixels[:-1])[0] + 1
runs[1::2] -= runs[::2]
return ' '.join(str(x) for x in runs)
# 将rle格式进行解码为图片
def rle_decode(mask_rle, shape=(512, 512)):
'''
mask_rle: run-length as string formated (start length)
shape: (height,width) of array to return
Returns numpy array, 1 - mask, 0 - background
'''
s = mask_rle.split()
starts, lengths = [np.asarray(x, dtype=int) for x in (s[0:][::2], s[1:][::2])]
starts -= 1
ends = starts + lengths
img = np.zeros(shape[0]*shape[1], dtype=np.uint8)
for lo, hi in zip(starts, ends):
img[lo:hi] = 1
return img.reshape(shape, order='F')
设置常用变量
- DEVICE:这是用于后续选择将数据放到GPU设备或者CPU设备上运行的属性
- IMAGE_SIZE:不同的图像大小,网络中的参数数量不一样。图像越大,参数越多,对算力要求越高。
- BATCH_SIZE: 批处理次数
- EPOCHES: 迭代轮数
DEVICE = 'cuda' if torch.cuda.is_available() else 'cpu'
EPOCHES = 20
BATCH_SIZE = 32
IMAGE_SIZE = 256
设置数据增强方式
这里用到了缩放、水平翻转、垂直翻转、随机90度旋转四类
trfm = A.Compose([
A.Resize(IMAGE_SIZE, IMAGE_SIZE),
A.HorizontalFlip(p=0.5),
A.VerticalFlip(p=0.5),
A.RandomRotate90(),
])
自定义数据集
class TianChiDataset(D.Dataset):
def __init__(self, paths, rles, transform, test_mode=False):
self.paths = paths
self.rles = rles
self.transform = transform
self.test_mode = test_mode
self.len = len(paths)
self.as_tensor = T.Compose([
T.ToPILImage(),
T.Resize(IMAGE_SIZE),
T.ToTensor(),
T.Normalize([0.625, 0.448, 0.688],
[0.131, 0.177, 0.101]),
])
# get data operation
def __getitem__(self, index):
img = cv2.imread(self.paths[index])
if not self.test_mode:
mask = rle_decode(self.rles[index])
augments = self.transform(image=img, mask=mask)
return self.as_tensor(augments['image']), augments['mask'][None]
else:
return self.as_tensor(img), ''
def __len__(self):
"""
Total number of samples in the dataset
"""
return self.len
加载训练数据
train_mask = pd.read_csv('data/train_mask.csv', sep='\t', names=['name', 'mask'])
train_mask['name'] = train_mask['name'].apply(lambda x: 'data/train/' + x)
dataset = TianChiDataset(
train_mask['name'].values,
train_mask['mask'].fillna('').values,
trfm, False
)
把训练数据分为训练集和验证集
valid_idx, train_idx = [], []
for i in range(len(dataset)):
if i % 7 == 0:
valid_idx.append(i)
# else:
elif i % 7 == 1:
train_idx.append(i)
train_ds = D.Subset(dataset, train_idx)
valid_ds = D.Subset(dataset, valid_idx)
# define training and validation data loaders
loader = D.DataLoader(
train_ds, batch_size=BATCH_SIZE, shuffle=True, num_workers=0)
vloader = D.DataLoader(
valid_ds, batch_size=BATCH_SIZE, shuffle=False, num_workers=0)
定义模型
使用的是fcn,特征提取是使用resnet50
def get_model():
model = torchvision.models.segmentation.fcn_resnet50(True)
# pth = torch.load("../input/pretrain-coco-weights-pytorch/fcn_resnet50_coco-1167a1af.pth")
# for key in ["aux_classifier.0.weight", "aux_classifier.1.weight", "aux_classifier.1.bias", "aux_classifier.1.running_mean", "aux_classifier.1.running_var", "aux_classifier.1.num_batches_tracked", "aux_classifier.4.weight", "aux_classifier.4.bias"]:
# del pth[key]
model.classifier[4] = nn.Conv2d(512, 1, kernel_size=(1, 1), stride=(1, 1))
return model
定义验证函数
@torch.no_grad()
def validation(model, loader, loss_fn):
losses = []
model.eval()
for image, target in loader:
image, target = image.to(DEVICE), target.float().to(DEVICE)
output = model(image)['out']
loss = loss_fn(output, target)
losses.append(loss.item())
return np.array(losses).mean()
定义损失函数
class SoftDiceLoss(nn.Module):
def __init__(self, smooth=1., dims=(-2,-1)):
super(SoftDiceLoss, self).__init__()
self.smooth = smooth
self.dims = dims
def forward(self, x, y):
tp = (x * y).sum(self.dims)
fp = (x * (1 - y)).sum(self.dims)
fn = ((1 - x) * y).sum(self.dims)
dc = (2 * tp + self.smooth) / (2 * tp + fp + fn + self.smooth)
dc = dc.mean()
return 1 - dc
bce_fn = nn.BCEWithLogitsLoss()
dice_fn = SoftDiceLoss()
def loss_fn(y_pred, y_true):
bce = bce_fn(y_pred, y_true)
dice = dice_fn(y_pred.sigmoid(), y_true)
return 0.8*bce+ 0.2*dice
加载模型,定义优化器,开始训练
model = get_model()
model.to(DEVICE);
optimizer = torch.optim.AdamW(model.parameters(),
lr=1e-4, weight_decay=1e-3)
header = r'''
Train | Valid
Epoch | Loss | Loss | Time, m
'''
# Epoch metrics time
raw_line = '{:6d}' + '\u2502{:7.3f}'*2 + '\u2502{:6.2f}'
print(header)
best_loss = 10
for epoch in range(1, EPOCHES+1):
losses = []
start_time = time.time()
model.train()
for image, target in tqdm_notebook(loader):
image, target = image.to(DEVICE), target.float().to(DEVICE)
optimizer.zero_grad()
output = model(image)['out']
loss = loss_fn(output, target)
loss.backward()
optimizer.step()
losses.append(loss.item())
# print(loss.item())
vloss = validation(model, vloader, loss_fn)
print(raw_line.format(epoch, np.array(losses).mean(), vloss,
(time.time()-start_time)/60**1))
losses = []
if vloss < best_loss:
best_loss = vloss
torch.save(model.state_dict(), 'model_best.pth')
加载最优模型,并在测试集上执行前向推理
trfm = T.Compose([
T.ToPILImage(),
T.Resize(IMAGE_SIZE),
T.ToTensor(),
T.Normalize([0.625, 0.448, 0.688],
[0.131, 0.177, 0.101]),
])
subm = []
model.load_state_dict(torch.load("./model_best.pth"))
model.eval()
test_mask = pd.read_csv('data/test_a_samplesubmit.csv', sep='\t', names=['name', 'mask'])
test_mask['name'] = test_mask['name'].apply(lambda x: 'data/test_a/' + x)
for idx, name in enumerate(tqdm_notebook(test_mask['name'].iloc[:])):
image = cv2.imread(name)
image = trfm(image)
with torch.no_grad():
image = image.to(DEVICE)[None]
score = model(image)['out'][0][0]
score_sigmoid = score.sigmoid().cpu().numpy()
score_sigmoid = (score_sigmoid > 0.5).astype(np.uint8)
score_sigmoid = cv2.resize(score_sigmoid, (512, 512))
# break
subm.append([name.split('/')[-1], rle_encode(score_sigmoid)])
0%| | 0/2500 [00:00<?, ?it/s]
将预测结果保存到本地
subm = pd.DataFrame(subm)
subm.to_csv('./result.csv', index=None, header=None, sep='\t')
提交成绩
