前言:这节主要介绍无人车定位系统里面使用到的定位算法。
概要:
1、定位技术简介
2、单个定位技术
3、定位融合技术
4、Apollo定位方案
1、定位技术简介
1.1 定位作用:
1)定位+高精地图:提供当前位置的静态环境感知(车道线/交通指示牌/红绿灯/柱子/建筑物等)
2)定位+动态物体感知:将感知到的动态物体正确放到静态环境
3)定位获取位置姿态:用于路径规划/决策
1.2 定位技术分类
1)场景:室内(房间/车库/厂库等)/室外
2)按定位模式:
----outside-in(从外向内):接收的外界信号包含位置相关信息/(这种模式适合测量方程)
例子:GNSS、UWB、WIFI、Lidar-Hdmap、Camera-marker(室外街景门牌内maker)、磁条加marker(规划都做了)、扫地机本身贴marker加顶部相机
----inside-out(从内到外):通过自身观察和感受获取位置信息/(这种模式适合状态方程)
例子:IMU 、magnetometer【磁力计,原理是磁通量来计算角度】、 SLAM【主动观测特征点】、VR中的墙面贴marker建图
【GNSS:全球导航卫星信息系统,如GPS;UWB:电信号】
3)按照计算方法:
----基于信号的定位:GNSS UWB WIFI/几何关系
----环境特征匹配:Lidar-HDmap【雷达扫描的,和高精地图比对,从而定位】、Camera-marker Radar/【这种方式】需要建图,观测特征与数据库的特征匹配得到当前姿态
----航迹推算:IMU odometry(轮子里程计/视觉里程计SLAM)/根据之前的位姿推断当前的位姿
1.3 定位系统的融合
1)原理:不同源传感器信息通过滤波器(KF EKF UKF PF等)【KF表示卡尔曼滤波;PF表示粒子滤波】进行融合
2)典型的融合方式:
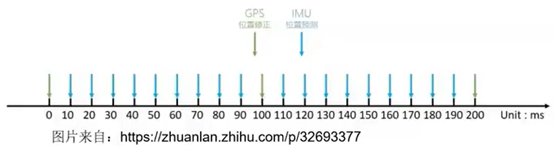
----IMU+GNSS:高频率累计误差+低频率高精度 【IMU大概100hz;GNSS大概10hz】
应用:无人车/无人机/导弹/室外
----GNSS+Lidar+HDmap/Camera-marker【这里的marker可以是门牌号这些】:适合开发环境+适合密集特征环境
应用:无人车/室内外
----VIO(视觉SLAM+IMU+GNSS)【V表示视觉惯性里程计;I表示IMU;】
应用:无人车/无人机/室内外
----IMU+magnetometer 矫正角度(例如:互补滤波/MadgwickAHRS)
应用:无人车/无人机/室内外
2、单个定位技术
2.1GNSS
1)GPS (global position system)
GNSS(GPS+BDS+GLONASS+GALILEO)
【BDS:中国的北斗;GLONASS:俄罗斯卫星定位系统;GALILEO:欧洲的伽利略系统】
2)基于信号的定位:
----车载/手机GPS接收机接收卫星发射的无线电信号
----三角定位法(Triangulation)【见图1】
--------GPS 接收机计算到达卫星的距离:TOF测距原理:距离R=无线电信号从卫星到接收机的传播时间T*光速C
---------每个卫星半径为R的球体表面是GPS接收机可能的位置
--------3个卫星产生的球面的交点就是GPS接收机的位置

3)问题1:无线电信号受到大气干扰无法准确计算GPS接收机到卫星的距离:无线电信号的传播时间受受传播介质的影响,例如云层的稀薄情况,天气情况
----解决:差分GPS技术(RTK)。在地面上建基站(Base Station)它有精确位置信息。也接收卫星信号,根据信号传播时间计算的位置与基站的精确位置比较,可以推算出此时的信号传播误差。当车载GPS接收机与基站的GPS接收机距离较近时(<30km),可以认为两者的GPS信号通过的是同一片大气区域具有相似的误差。就可以用基站推算出误差去修正GPS的位置。
【内容参考:https://zhuanlan.zhihu.com/p/32638633】

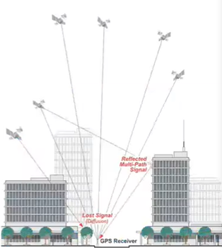
4)问题2:遮挡/反射问题
----遮挡:GPS接收机在高楼周围,容易失去某一方向所有卫星信号,仅有特定方向的卫星信号使得定位精度降低
----反射:有些信号被大楼楼体反射之后才被接收到,称为多路径信号(Multi-Path Signal),多路径信号计算得到的距离会明显大于实际距离(因为时间偏大)。而GPS接收机很难判断是否是多路径信号
------解决:仅靠GPS一种传感器很难在复杂场景中实现精确定位,必须引入其他互补传感器进行融合定位
5)问题3:定位频率低
----GPS定位的频率一般只有10HZ(100ms定位一次);72km/h(20m/s)运动的汽车一个定位周期(100ms)内已经移动了20m/s*01s=2m。弯道情况下每隔2m才控制一次运动方向可能导致车辆沿弯道一会左偏,一会右偏。
----解决:引入其他传感器(例如IMU)提供定位频率,进而提高控制频率
6)GNSS小结:
优点:全球、全天候、全时段、高精度
缺点:
----RTK差分技术的基站布设成本高
----依赖可视卫星数量
----易受电磁环境干扰
----定位频率不够高
----遮挡/反射(多径效应)
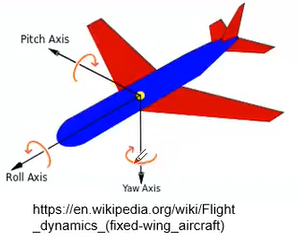
2.2 IMU
1)捷联惯性导航(SINS:strapdown inertial navigation system)技术:
----惯导系统是一种不依赖任何外部信息、也不向外部辐射能量的自主式导航系统,隐蔽性好,可在空中、地面、水下等各种复杂环境下工作
----主要分为平台式惯导系统和捷联式惯导系统两大类。捷联惯导系统是在平台式惯导系统基础上发展而来的,它是一种无框架系统(没有物理平台也没有数字平台,通过计算进行姿态变换,结构简单、体积小、重量轻、成本低、维护简单、可靠性高)
----捷联(Strapdown)式“捆绑”的意思。所谓捷联惯性系统是将惯性敏感元件(陀螺和加速度计)直接“捆绑”在运载体的机体上,从而完成制导和导航任务的系统
----陀螺和加速度计分别用来测量运载体的角运动信息(角速度)和线运动信息(加速度)
----经过解算得到载体的速度、位置、姿态
2)惯性测量单元(IMU)
----主要有陀螺仪和加速度计组成。消费级IMU(精度价格低)–>光纤IMU(精度价格高)
----加速度计能够测量出载体相对惯性空间所受的力(进而得到加速度)
----陀螺仪能够测量出载体沿陀螺仪轴向的旋转角速度
----IMU是惯性导航系统的基础,直接决定了惯性导航系统所能够达到的精度

3)IMU小结:
优点:
----输出频率高
----短时精度高
----六自由度(角速度,加速度各3个方向)
----可工作在任何复杂环境
缺点:误差随时间累积
2.3 Lidar/Camera
1)环境特征匹配:Lidar-HDmap/Camera-marker
2)Lidar-HDmap
----预先制定定位地图3D/2D
----车上的实时点云和地图进行匹配计算激光雷达的位置和姿态
----如何匹配?
--------基于3D点云匹配:Scan Matching完成点云匹配
-------------ICP:最常见的迭代最近点法(Iterative Closest Point,ICP),该方法基于当前扫描和目标扫描的距离度量来完成点云配准
-------------NDT:正态分布变换(Normal Distributions Transform,NDT)也是进行点云配准的常用方法,它基于点云特征直方图来实现配准
--------基于2D概率地图的直方图滤波匹配定位
----特点:
优点:鲁棒性比较好/无GPS可工作/能实现10厘米以内的定位精度
缺点:
----需要预先指着地图并定期更新地图(环境会发生变化)
----雨雪天气情况下Lidar被折射导致收到的点云数据变少
----开放路段点云仍需要GNSS(对于场景一路段如高速公路GNSS+Lidar-HDmap成本过高)

3)Camera-marker
----街景定位(论文:Sacha Arnoud,Director of Engineering,Waymo)
----Waymo利用谷歌强大的街景数据标注出路牌号码,商店标志,红绿灯等静态数据来确定自身车辆所在的位置
--------原理:
--------------预先标注出路牌号码,商店牌匾,红绿灯等静态marker的全球坐标系
--------------车载相机(双目)检查出marker之后,通过透视原理或者相对距离推算出车辆自身的全球坐标
--------------优点:简单直接:街景地图标记好之后,车辆本身只需要摄像机就可以实现准确的的定位和导航
—缺点:
------巨大的数据量和人工标注
------摄像机采图问题:强光/弱光/逆光都会影响检查效果,进而导致推算的位置不准
------基于图像计算深度图存在误差(越远视差(察)越小,误差越大z=fb/d fb焦距;d:视差)
------开发场景下(如高速公路)marker少甚至没有marker

2.4 SLAM
1)SLAM:Simultaneous Localization and Mapping 同时定位与建图
----定位:室内、室外(解决 我在哪? 的问题)
----建图:稀疏、半稠密、稠密(环境如何?)
----准确的定位需要精确的地图,精确的地图来自精确的定位
2)类型:激光SLAM/视觉SLAM(Moncular/Stereo/RGB-D)/VIO(IMU+SLAM)
3)主要应用方向:
–机器人定位(例如扫地机器人)/手持设备定位(例如AR)/自动导航定位
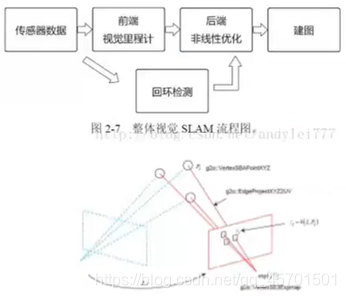
4)视觉SLAM框架
----前端:Visual Odometry视觉里程计用于估计临近时刻的相机运动(类似IMU航迹推算)
----后端:Optimization(滤波器法/图优化法)使用局部约束关系估计最优轨迹与地图
----回环检测:Loop Closing 检测是否形成了一个回环进而矫正整圈轨迹
----建图:Mapping 度量地图、拓扑地图、稀疏地图、稠密地图
 【这个建图的关键公式】
【这个建图的关键公式】
【入门到深入教材使用;老师建议看完左1,接着看ORB开源方案代码,接着VIO开源方案代码】
纯视觉定位例子:https://www.youtube.com/watch?v=j2ZNuBCr4SA
3、定位融合技术
1)原理:不同源传感器信息通过滤波器(KF EKF UKF PF等)进行融合,优势互补
2)典型融合方式:
----IMU+GNSS:高频率累计误差+低频率高精度
---------应用场景:无人车、无人机、导弹、室外
----GNSS+Lidar-HDmap/Camera-marker:适合开发环境+适合密集特征环境外
---------应用场景:无人车、室内外
----VIO(SLAM+IMU+GNSS)
---------应用场景:无人车、无人机、室内外
----IMU+magnetometer 矫正角度【磁力计矫正IMU的角度】(例如:互补滤波/MadgwickAHRS)
---------应用场景:无人机、无人机、室内外
3.1 Histogram Filter(直方图滤波)
1)
左侧是小车,右侧5格子是小车的运动范围,循环往复运动
参考:Udacity <> Lesson1
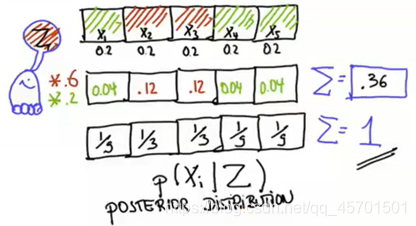
初始化位置x1:刚开始自己位置完全不知,均匀分布表示在任何位置的概率都是均等的
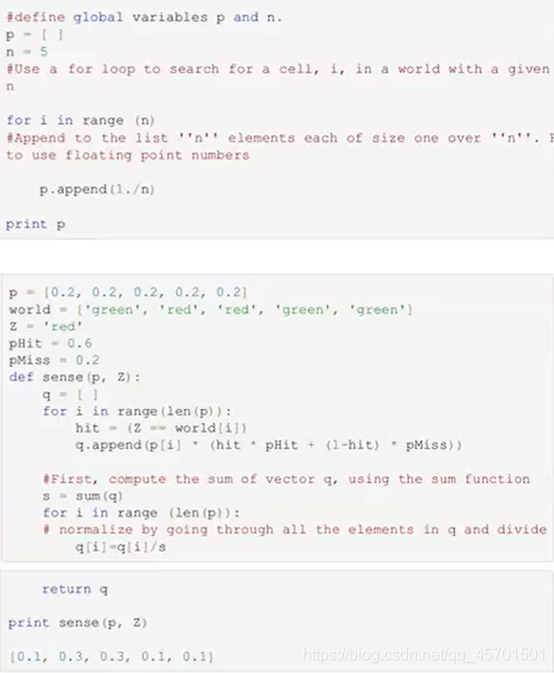
向右一步移动到x2:观察一次发现自己在红色格子里。可以根据观察更新一下概率分布(红色0.6绿色0.2并概率化)【0.6是人为定的】
【绘图简单理解,一开始小车并不知道自己所在位置,每个格子可行性相等;移动一步后,并观察到自己所在区域是红色格子,那么就将红色部分按照权值0.6相乘,绿色*0.4,获取新的格子概率,得到上面绘图第二行数字,不过凸显了红色和绿色的;但是,此时会发现概率之和不为1了,此时将除以当前概率总和,得到第三行数字;那么,绘制图案中的概率P表示的是在观测Z的条件下的xi发生的概率】
下面的代码就是实现绘制图的
2)确定性移动:
----再次向右精确的走一步(假设走到最右端回到最开始的位置继续走)
----设计一个move函数:输入概率分布p和移动步数U(-1表示向左移1步;2表示向右移动2步;正负表示右左,数字表示步数)输出移动之后的概率分布p

【绘图表示的是向右移动一步】

【输入移动前每格的概率分布,以及步数,返回移动后的概率分布】
P[(i-U)%len(p)]:(i-U)表示当前格概率是没有移动前的概率值,求余运算是由于循环往复原因。
3)不确定性的移动
----实际上不可能每次移动都保证很精确,U=2移动时的不确定性(虽然说是移动了2格,但是真正移动多少格属于不确定性的)如图1表达
----假设p=[0 1 0 0 0]输出什么分布?
----假设p=[0 0.5 0 0.5 0]输出什么分布?
----假设p=[0.2 0.2 0.2 0.2 0.2]输出什么分布?
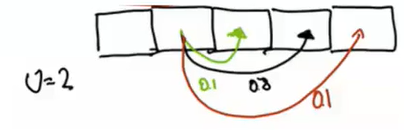
【线的数字表示移动到该格的权值,这里表示达到格子的可能性】
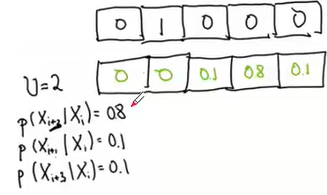

【下行的概率数值,都是通过移动2格0.8,移动1格或3格0.1,计算所得,对于有多个移动,则叠加】


【这里面pExact pOvershoot pUndershoot表示正常移动,走多,走少时所对应的权重0.8,0.1,0.1;最后返回的是,各个格子概率分布;老师说,这类似滑窗时的卷积计算】
4)例子:移动带来不确定性
----p=[0,1,0,0,0]移动一次p=[0,0,0.1,0.8,0.1,0]
----如果连续移动两次p=[0.001,0.001,0.16,0.66,0.16]
----连续移动1000次,p=[0.2,0.2,0.2,0.2,0.2]又回到了完全不确定了,再怎么移动都无法改变概率分布了,必须进行观测增加信息
5)每次移动会丢失信息,每次观察会增加信息

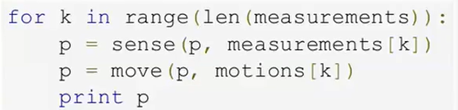
【sense表示观察;move表示移动;两者配合才获取比较准确的值】
4、Apollo定位方案
参考:
论文:https://arxiv.org/pdf/1711.05805.pdf《Robust and Precise Vehicle Localization based on Multi-sensor Fusion in Diverse City Scenes》
作者演讲:https://mp.weixin.qq.com/s/89xbHeS8RtS1L_fBe1VMDw
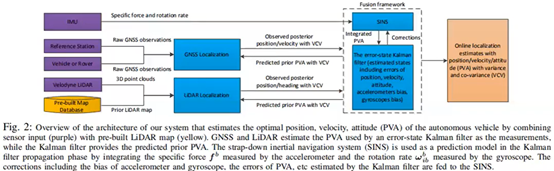
【PVA方差;VCV协方差;GNSS、LIDAR定位都可以给出观测结果,指向的是观测方程,而且两者可以接收SINS预测的PVA;SINS里面是运动方程】
2)Apollo定位方案

Attitude error指的是姿态误差;accelerometers bias 加速度偏置;gyroscopes bias角速度偏置
6-DoF:position有三个,xyz;attitude有三个,ryp.
3)点云定位模块



二维直方图滤波器:
----中心放在预测姿态(x0,y0),滤波器一般选择21*21=441个位置进行搜索【每个格子有个置信度,会选择置信度最高的作为预测位置,这里的置信度可以理解为匹配效果】【如右图的红色区域置信度最高,就是激光雷达数据得到的位置】
----predict(move):【使用高斯分布,预测移动到达位置】
----update(sense):SSD衡量观测与地图点的匹配程度【SSD显示的误差如果比较大的话,表示匹配不好,则将该区域的权重选小一些】
【SSD-HF表示直方图滤波,SSD表示误差的平方和;表示的是将误差平方和来判断匹配的效果;根据匹配结果来打分,如残差比较小,则打分比较高】
老师分享学习SLAM经历(经验)
1)从CV转SLAM,网上搜索知道高翔讲SLAM比较好,也有他一本书叫SLAM十四讲;
2)过年时,开始自学这本书,抱着能理解多少算多少心态,把这本书看了一遍;
3)需要把框架体系整理起来,也就是把SLAM基本概念要有才行;
4)看完十四讲,看得似懂非懂,后面直接看ORB代码
5)ORB代码,从前端开始看,然后看后端。因为工作原因,所以看得比较断续。
6)当把ORB代码看差不多时候,感觉通了,对SLAM有了很好得认识
7)ORB代码就是讲述框架体系的东西
8)必须看代码才能知道是(框架体系内容或者概念)怎么操作的
9)十四讲的代码量比较小,跑一跑理解基本概念是可以的;系统整体性考虑,可能看一些开源的,比如ORB,比较好一些
10)看完十四讲后(也搞懂了ORB代码后),回头再看书,会发现,很流畅了
11)建议看代码时,不应该抠比较细节东西,细节东西,如某矩阵怎么求的;应该先理清整体框架,比如应该知道怎么运行该程序,前端怎么跑的,怎么选取关键帧的,前端怎么跟后端对接,后端是怎么拿到做公示图做优化
12)有了代码的整体框架,回头查询细节东西,通过blog啥的,会很容易理解消化该知识点了。
13)有了上面的经验,就开始看VIO方面的知识。
14)看VIO,直接找一个开源的项目来看。其中VINS资源比较多
15)看VIO,一定只挑一个方案来看,细看,直到看懂(比如只选择VINS);看懂一个,其他就是依此类推的
16)卡尔曼kalman滤波的概念很关键;ROstate的卡尔曼滤波掌握了,就有了一个全局的概念;有了全局概念,再看MSCKFVIO,这个代码量比较小,比较好理解。老师说,接下来就是研究VINS的代码
17)https://gitee.com/paopaoslam/ORB-SLAM2 ORB-slam中文注释版学习
18)其他关于ORB代码学习,可以再GitHub上面搜一些初学者的代码注释,一般会写的很详细的
19)无人驾驶的方向很多,授课的面很广,需要有针对性选择来深入学习,提供应聘成功率
20)人的精力有限,需要选择一个方向来专攻。举个例子,单纯高精地图就是一个组的人来负责的;而视觉里面,单纯点云方面就有好几个岗位。
21)阿波罗的rtk,用的是原生的GPS数据,自己计算的,从而方便查看哪个方面产生偏差
22)GPS数据,有原生类型,也有经过处理好的
23)激光雷达是可以做SLAM的,将激光作为特征来使用;Apollo是使用高精地图加激光匹配方式实现的,跟单纯激光SLAM有点不一样的。
个人小结:这节课介绍了无人车的定位算法方面知识。首先对定位技术做了简单介绍,然后
介绍常见的单定位技术:GNSS、IMU、lidar-HDmap/Camera-marker,SLAM,也点出了其中有些不足。接着,引入定位融合技术的知识。介绍了几种融合定位技术,最后介绍Apollo定位方案,作为融合定位技术的例子。
#####################
感恩授课老师的付出
图片版权归原作者所有
不积硅步,无以至千里
好记性不如烂笔头
感觉有点收获的话,麻烦大大们点赞收藏哈