单例模式简介
单例模式,在全局中,仅可以有一个单利模式的类实例,并提供了一个全局访问点来访问这个唯一实例。
可以看出,单利模式的特点有
- 这个类只能有一个实例
- 必须自己创建这个实例
- 必须自己向整个系统提供这个实例
单例模式结构
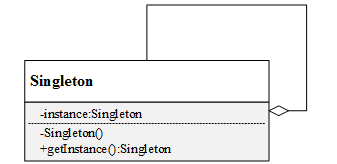
单例模式结构非常简单,只包含一个类,即单例类。为防止创建多个对象,其构造函数必须是私有的。
另一方面,为了提供一个全局访问点来访问该唯一实例,单例类提供了一个公有方法getInstance来返回该实例。
单线程
该类的构造函数为私有,并且包含一个静态的成员变量m_instance和成员函数GetInstance()。使用时通过GetInstance()返回该类的指针。
上个例子:
#include<iostream>
#include<thread>
#include<mutex>
#include<algorithm>
using namespace std;
class MyCAS
{
public:
static MyCAS *GetInstance()
{
if (m_instance == NULL)
{
m_instance = new MyCAS();
cout << "MyCAS Set" << endl;
}
return m_instance;
}
private:
MyCAS() {
}
static MyCAS *m_instance;
};
MyCAS *MyCAS::m_instance = NULL;
int main()
{
MyCAS *ptr1 = MyCAS::GetInstance();
MyCAS *ptr2 = MyCAS::GetInstance();
return 0;
}
可以看出,构造函数是私有的,这样单例模式就只能在类内部实现实例化。同时,实例对象instance是全局静态static的,因此保证了instance只能被创建一次。
多线程
现在考虑以下多线程的情况,m_instance为空,如果有两个线程同时执行函数GetInstance(),则m_instance = new MyCAS()可能会执行多次,程序中就会出现多个对象,这显然违背了单例模式的设计初衷。
#include <iostream>
#include <thread>
#include <mutex>
#include <algorithm>
using namespace std;
mutex resource_mutex;
class MyCAS
{
public:
static MyCAS *GetInstance()
{
// double check
if (m_instance == NULL)
{
unique_lock<mutex> guard(resource_mutex);
if (m_instance == NULL)
{
m_instance = new MyCAS();
cout << " MyCAS Set ! " << endl;
}
}
return m_instance;
}
private:
MyCAS() {
}
static MyCAS *m_instance;
};
MyCAS *MyCAS::m_instance = NULL;
void MyFunc()
{
cout << " Thread Start " << endl;
MyCAS *ptr = MyCAS::GetInstance();
cout << " Thread Stop " << endl;
}
int main()
{
thread obj1(MyFunc);
thread obj2(MyFunc);
obj1.join();
obj2.join();
return 0;
}
call_once()
call_once()中设置有标志位flag_once,通过记录此标志位来确定函数是否被调用过,从而保证了函数只被调用了一次。其他线程再次调用函数call_once()时,就不会再执行该函数了。
#include <iostream>
#include <thread>
#include <mutex>
#include <algorithm>
using namespace std;
once_flag g_flag;
class MyCAS
{
public:
static void CreatInstance()
{
m_instance = new MyCAS();
cout << " MyCAS Set " << endl;
}
static MyCAS *GetInstance()
{
call_once(g_flag, CreatInstance);
return m_instance;
}
private:
MyCAS() {
}
static MyCAS *m_instance;
};
MyCAS *MyCAS::m_instance = NULL;
void MyFunc()
{
cout << " Thread Start " << endl;
MyCAS *ptr = MyCAS::GetInstance();
cout << " Thread Stop " << endl;
}
int main()
{
thread obj1(MyFunc);
thread obj2(MyFunc);
obj1.join();
obj2.join();
return 0;
}