原理
Kalman filter algorithm的核心就是五大公式,这五大公式包含了测量值,先验值,后验值。先验值其实就是根据系统模型算出来的近似值(建模存在不准确问题),而同时我们利用检测设备还可以测得一个测量值,现在问题就是如何将这两个值进行数据融合,计算出一个在该时刻的后验值,这个后验值需满足误差方差最小原则(此时最靠近真实值)。Kalman滤波算法是经过严密推导的数学最优化问题,这里不再推导,给出最终算法的5大公式:

公式中 X ^ 1 , k − \hat{X}^-_{1,k} X^1,k−为先验位置, X ^ 1 , k \hat{X}_{1,k} X^1,k为后验值(在第k步Kalman滤波后的结果)。在Kalman滤波中需要初始化几个数据,即在0时刻的 X ^ \hat{X} X^和在1时刻的 P k P_k Pk,那么在1时刻可以根据第一个公式计算出先验值,根据第二个公式计算出新的 P k − P^-_k Pk−(先验),之后根据第三个式子计算出 K k K_k Kk(这个式子右边是 P k − P^-_k Pk−写错了),第四个式子进行先验值和测量值的数据融合,最后一个式子更新 P k P_k Pk。
MATLAB实现一个Kalman filter实例
这里我们假想一个物体在一维空间运动,有速度和位置两个状态变量,初始在0位置处,速度为1,系统采样周期为1s,现有卫星观测器观测其位置和速度,但是都存在噪声,我们已经对这个二阶模型建好模了(k时刻位置为k-1时刻位置+速度*1s+噪声,k时刻速度为k-1时刻速度:+噪声),现采用Kalman filter algorithm进行滤波。

代码如下:
%------------------Kalman filter----------------%
%This is an application of Kalman filter algorithm in a simple problem which needs
%us to estimate the displacement and speed. The initial condition is [0;1], which
%means the x0 = 0, v0 = 1. Besides, the interval time is 1s. p(w) and p(v) are the noise
%which obey normal distribution and the covariance matrices are Q and R respectively.
H = eye(2); A = [1 1;0 1];
Pk = eye(2); Q = 0.1*eye(2);R = eye(2);
X_k = [0;1]; X_hat = [0;1];
X_kdata = [0;1]; X_hatdata = [0;1];
X_hat_data = []; Z_kdata = [];
iter = 20;
for i = 1:iter
pw = mvnrnd([0 0],[0.1 0;0 0.1],1)';
pv = mvnrnd([0 0],[1 0;0 1],1)';
X_k = A*X_k + pw; X_kdata = [X_kdata,X_k];
Z_k = H*X_k + pv; Z_kdata = [Z_kdata,Z_k];
Pk_ = A*Pk*A'+Q;
Kk = Pk_*H'*inv(H*Pk_*H'+R);
X_hat_ = A*X_hat;
X_hat_data = [X_hat_data,X_hat_];
X_hat = X_hat_ + Kk*(Z_k - H*X_hat_);
X_hatdata = [X_hatdata,X_hat];
Pk = (eye(2) - Kk*H)*Pk_;
end
figure(1);
plot(0:iter,X_kdata(1,:),0:iter,X_hatdata(1,:)...
,1:iter,X_hat_data(1,:),1:iter,Z_kdata(1,:)...
,0:iter,X_kdata(2,:),0:iter,X_hatdata(2,:)...
,1:iter,X_hat_data(2,:),1:iter,Z_kdata(2,:));
legend("实际位置","后验位置","先验位置","测量位置",...
"实际速度","后验速度","先验速度","测量速度"...
,"Location","best");
grid on; title("Kalman filter");
xlabel("iter"); ylabel("x or v");
- 结果
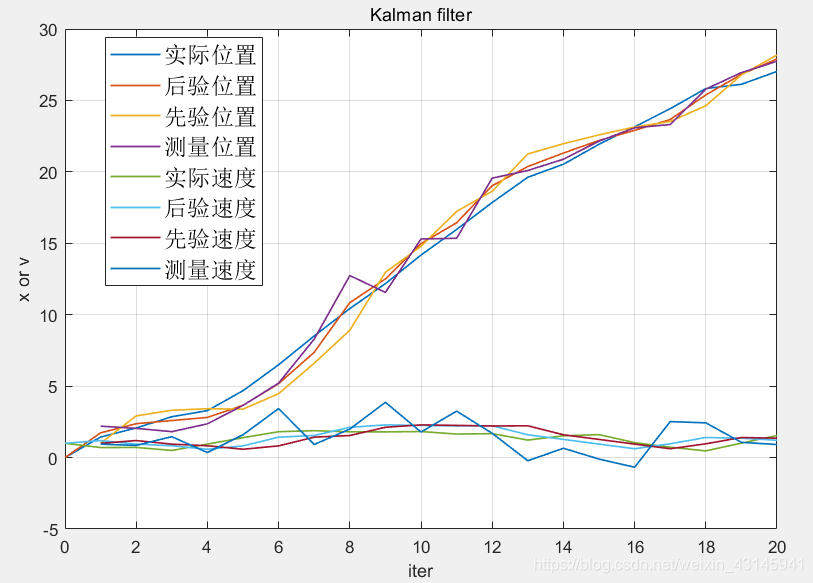
- 局部放大


可以看到Kalman filter实际上是一个数据融合的过程,测的相较于算的不准的时候就偏向于算的,算的相较于测得不准的时候就偏向于测的,而这个融合的系数 K k K_k Kk是最优化误差方差得到的。