一. 开源
二. 安装
参考:
- 上面 Github 的 README.md
- 【运动控制】MPC控制器(c++)和驾驶模拟器(Udacity)的联合仿真
安装中遇到的主要问题:
1. uWebSockets
编译过程中会提示缺少:
src/uUV.h:5:10: fatal error: uv.h: 没有那个文件或目录
#include <uv.h>
安装:
2. ipopt
注意:安装的时候不要在中文路径下
3. 模拟器
可以选择 term2_sim_linux.zip 安装包下载下来
三. 运行
cd MPC_tracking/
mkdir build && cd build
cmake .. && make
./mpc
可以看到:
djq@djq-UX410UQK:~/Me/MPC_tracking/build$ ./mpc
Listening to port 4567
再运行模拟器:
sudo chmod +x term2_sim.x86_64
./term2_sim.x86_64
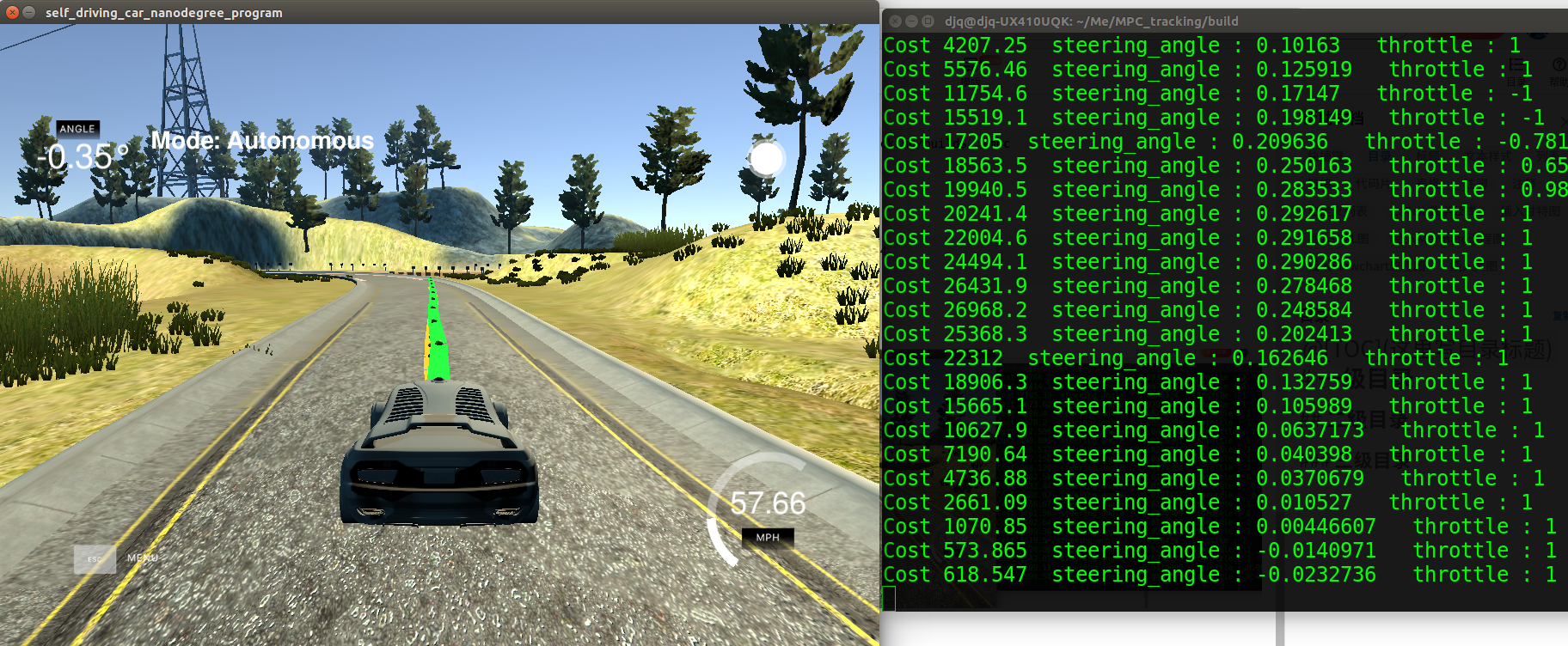
结果: