首先检测手的标志,然后根据这些标志点进行跟踪和点击,外加一些平滑技术以使其更加流畅。
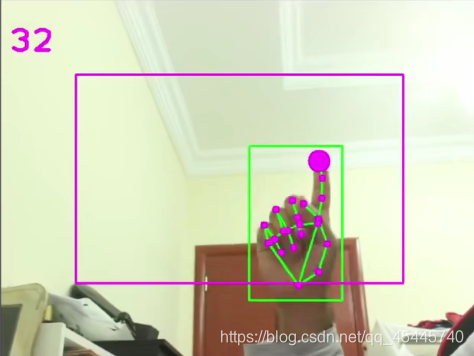
效果:
运行AiVitrualMouse.py文件。
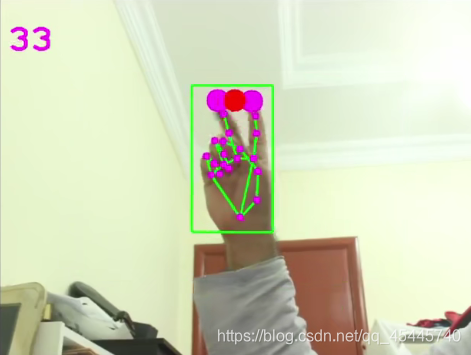
食指是鼠标的移动模式,当食指和中指都翘起来且靠近时,是鼠标的点击模式。
源码:
AiVitrualMouse.py
import cv2
import numpy as np
import HandTrackingModule as htm
import autopy
import time
##########################
wCam, hCam = 640, 480
frameR = 100 # Frame Reduction
smoothening = 7
#########################
pTime = 0
plocX, plocY = 0, 0
clocX, clocY = 0, 0
cap = cv2.VideoCapture(0)
cap.set(3, wCam)
cap.set(4, hCam)
detector = htm.handDetector(maxHands=1) #设定最大手的个数为1
wScr, hScr = autopy.screen.size()
# print(wScr, hScr)
while True:
# 1. 找到手工制作地标
success, img = cap.read()
img = detector.findHands(img)
lmList, bbox = detector.findPosition(img)
# 2. 获得食指和中指的指尖
if len(lmList) != 0:
x1, y1 = lmList[8][1:]
x2, y2 = lmList[12][1:]
# print(x1, y1, x2, y2)
# 3. 检查一下哪个手指翘起来了
fingers = detector.fingersUp()
# print(fingers)
cv2.rectangle(img, (frameR, frameR), (wCam - frameR, hCam - frameR),
(255, 0, 255), 2)
# 4. 只有食指:移动模式
if fingers[1] == 1 and fingers[2] == 0:
# 5. 转换坐标
x3 = np.interp(x1, (frameR, wCam - frameR), (0, wScr))
y3 = np.interp(y1, (frameR, hCam - frameR), (0, hScr))
# 6. 平滑值
clocX = plocX + (x3 - plocX) / smoothening
clocY = plocY + (y3 - plocY) / smoothening
# 7. 移动鼠标
autopy.mouse.move(wScr - clocX, clocY)
cv2.circle(img, (x1, y1), 15, (255, 0, 255), cv2.FILLED)
plocX, plocY = clocX, clocY
# 8. 食指和中指都是向上的:点击模式
if fingers[1] == 1 and fingers[2] == 1:
# 9. 找出手指之间的距离
length, img, lineInfo = detector.findDistance(8, 12, img)
# print(length)
# 10. 如果距离短,点击鼠标
if length < 40:
cv2.circle(img, (lineInfo[4], lineInfo[5]),
15, (0, 255, 0), cv2.FILLED)
autopy.mouse.click()
# 11. 计算当前的帧率
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(int(fps)), (20, 50), cv2.FONT_HERSHEY_PLAIN, 3,
(255, 0, 0), 3)
# 12. 显示
cv2.imshow("Image", img)
cv2.waitKey(1)
HandTrackingModule.py
"""
Hand Tracking Module
By: Murtaza Hassan
Youtube: http://www.youtube.com/c/MurtazasWorkshopRoboticsandAI
Website: https://www.computervision.zone
"""
import cv2
import mediapipe as mp
import time
import math
import numpy as np
class handDetector():
def __init__(self, mode=False, maxHands=2, detectionCon=0.5, trackCon=0.5):
self.mode = mode
self.maxHands = maxHands
self.detectionCon = detectionCon
self.trackCon = trackCon
self.mpHands = mp.solutions.hands
self.hands = self.mpHands.Hands(self.mode, self.maxHands,
self.detectionCon, self.trackCon)
self.mpDraw = mp.solutions.drawing_utils
self.tipIds = [4, 8, 12, 16, 20]
def findHands(self, img, draw=True):
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(imgRGB)
# print(results.multi_hand_landmarks)
if self.results.multi_hand_landmarks:
for handLms in self.results.multi_hand_landmarks:
if draw:
self.mpDraw.draw_landmarks(img, handLms,self.mpHands.HAND_CONNECTIONS)
return img
def findPosition(self, img, handNo=0, draw=True):
xList = []
yList = []
bbox = []
self.lmList = []
if self.results.multi_hand_landmarks:
myHand = self.results.multi_hand_landmarks[handNo]
for id, lm in enumerate(myHand.landmark):
# print(id, lm)
h, w, c = img.shape
cx, cy = int(lm.x * w), int(lm.y * h)
xList.append(cx)
yList.append(cy)
# print(id, cx, cy)
self.lmList.append([id, cx, cy])
if draw:
cv2.circle(img, (cx, cy), 5, (255, 0, 255), cv2.FILLED)
xmin, xmax = min(xList), max(xList)
ymin, ymax = min(yList), max(yList)
bbox = xmin, ymin, xmax, ymax
if draw:
cv2.rectangle(img, (xmin - 20, ymin - 20), (xmax + 20, ymax + 20),(0, 255, 0), 2)
return self.lmList, bbox
def fingersUp(self):
fingers = []
# Thumb
if self.lmList[self.tipIds[0]][1] > self.lmList[self.tipIds[0] - 1][1]:
fingers.append(1)
else:
fingers.append(0)
# Fingers
for id in range(1, 5):
if self.lmList[self.tipIds[id]][2] < self.lmList[self.tipIds[id] - 2][2]:
fingers.append(1)
else:
fingers.append(0)
# totalFingers = fingers.count(1)
return fingers
def findDistance(self, p1, p2, img, draw=True,r=15, t=3):
x1, y1 = self.lmList[p1][1:]
x2, y2 = self.lmList[p2][1:]
cx, cy = (x1 + x2) // 2, (y1 + y2) // 2
if draw:
cv2.line(img, (x1, y1), (x2, y2), (255, 0, 255), t)
cv2.circle(img, (x1, y1), r, (255, 0, 255), cv2.FILLED)
cv2.circle(img, (x2, y2), r, (255, 0, 255), cv2.FILLED)
cv2.circle(img, (cx, cy), r, (0, 0, 255), cv2.FILLED)
length = math.hypot(x2-x1,y2-y1)
return length, img, [x1, y1, x2, y2, cx, cy]
def main():
pTime = 0
cTime = 0
cap = cv2.VideoCapture(1)
detector = handDetector()
while True:
success, img = cap.read()
img = detector.findHands(img)
lmList, bbox = detector.findPosition(img)
if len(lmList) != 0:
print(lmList[4])
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3,(255, 0, 255), 3)
cv2.imshow("Image", img)
cv2.waitKey(1)
if __name__ == "__main__":
main()