电机驱动模块
用到的电机驱动模块示意图如下,没用L298N是因为它最高只能控制12V的电机,而实验室使用的是24V电机,因此在淘宝上找了找,选择了下面的模块。

具体引脚分配图如下:

该模块有两种使用方法:

该模块可控制电机的启停和正反转,且通过PWM控制电机转速,目前采用方法1控制。实际接线发现不需要额外提供5V电源给模块供电,dSPACE的PWM引脚会给模块供电,因此R_EN、L_EN、VCC短接,相当于接5V,GND单独接。
Simulink控制模型搭建
搭建Simulink控制算法如下图所示,包含位置控制、正反转控制、占空比限制、PID调节、位置重置等多个子系统,可以实现车轮转速和转向的单独控制。

转速方面,Delta Position输出的是采样时间间隔内编码器脉冲数的改变量,因此通过M法测速计算出当前电机的实际转速,将实际转速反馈回去,和设定转速比较,通过PID进行调节,从而实现转速单闭环的控制。
转向方面,Enc Position输出电机运行后编码器的总脉冲数,因此可以计算电机一共转了多少圈,进而可以计算电机的转动角度,将实际转动值与设定值进行比较,判断电机是否转动到目标位置,到达即停止,从而实现电机转动角度的控制。
硬件平台搭建
外围电路的搭建如下图所示:
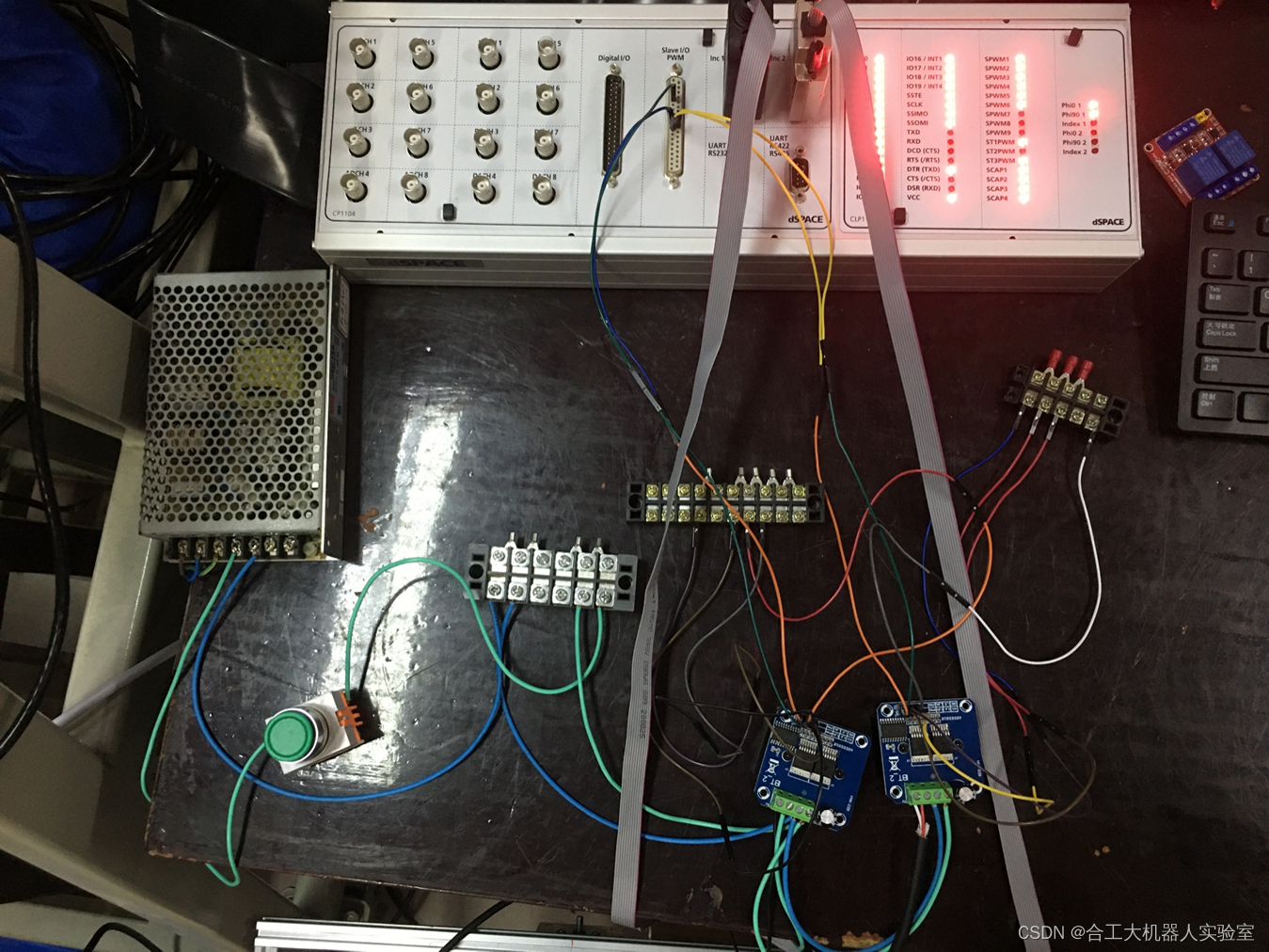
阅读文献并实验验证,RTI PWM模块四路PWM信号与CLP1104面板CP18端口引脚对应关系如下:

根据编码器引脚分配制作SUB-D接头与CLP1104面板Inc1、Inc2端口相连,编码器引脚分配如下图所示:

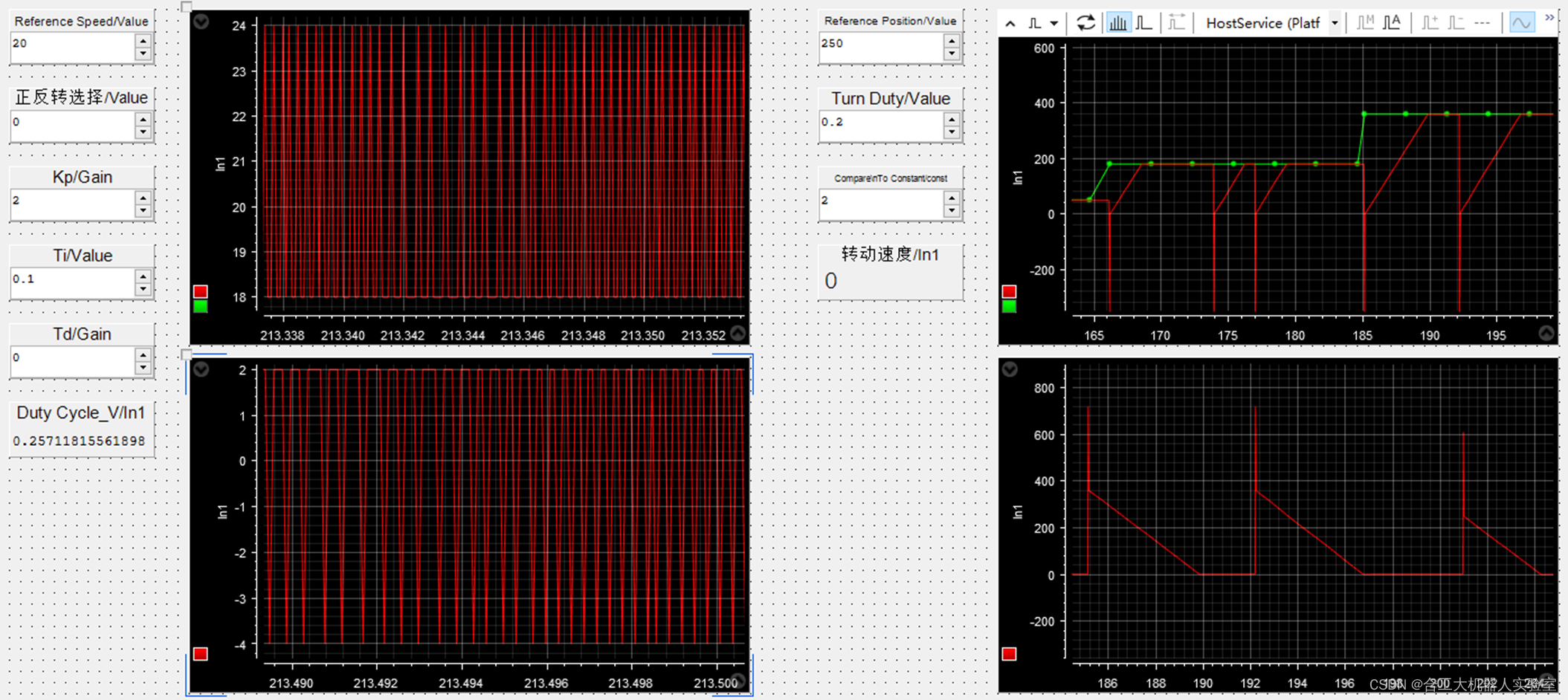
Control Desk实验模型搭建
转速方面,在Control Desk中可以设定转速值、选择正反转、调节各PID参数,输出设定转速曲线、实际转速曲线以及转速误差曲线。
转向方面,在Control Desk中可以设定转动量、转动速度,输出设定转角曲线、实际转角曲线和转角误差曲线,并且可以修改允许的最小转角误差值。