一、导读
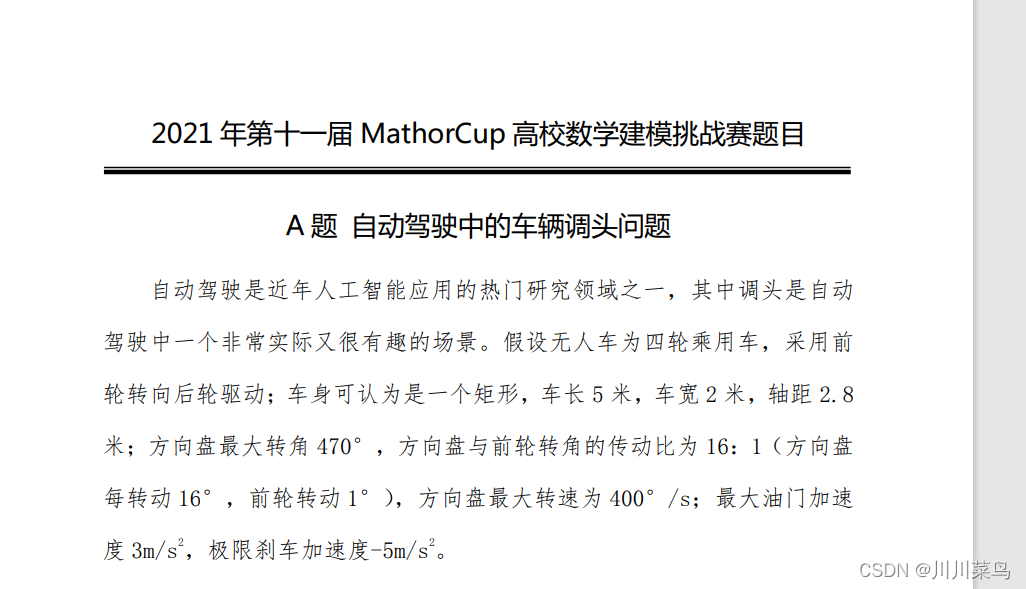
这是一个无人车,它的相关数据为:

长宽高这些数据,是个人都能懂,描述一个车辆的、加速度知道吧?a=v/t,它描述的含义为速度变化率,单位时间速度变化量。加加速度是什么?a’=a/t,就是加速度变化率呗。减加速度是一样的道理,只是一个增加,一个减少而已。a’如果为正,不管它是在增加还是减小,a的值都是增加,为负数同理。
方向盘转速倒是挺大的,要是人还做不到这么快吧。
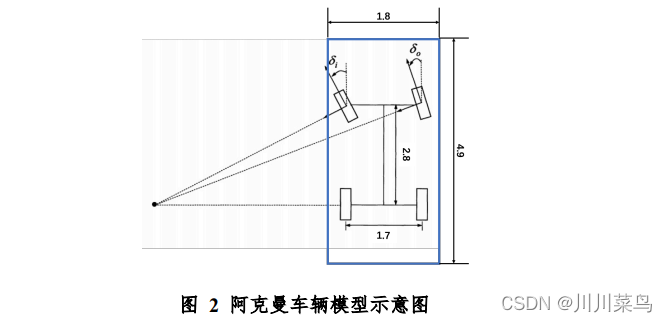
这个玩意呢,就是个车辆模型,了解下这个方块的无人车构造,是一个车辆运动学模型,参考下这篇文章的具体讲解:
https://blog.csdn.net/weixin_47012067/article/details/121097901
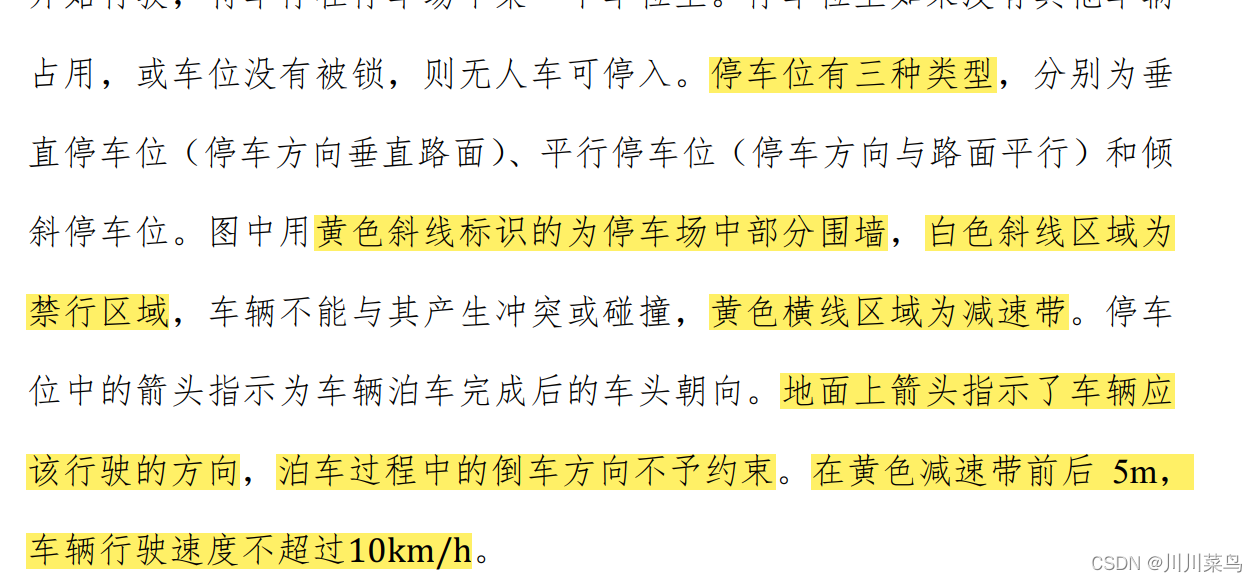
接着介绍了三种停车位类型:
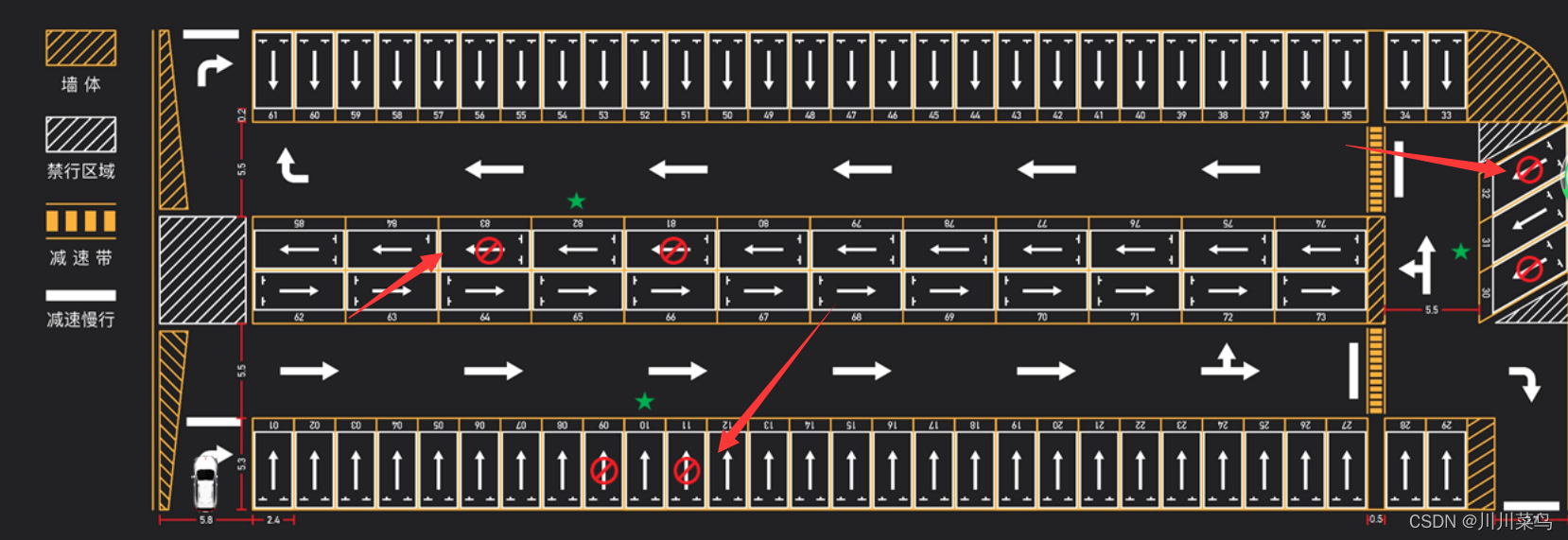
具体图为,看不清楚可以自己放大:

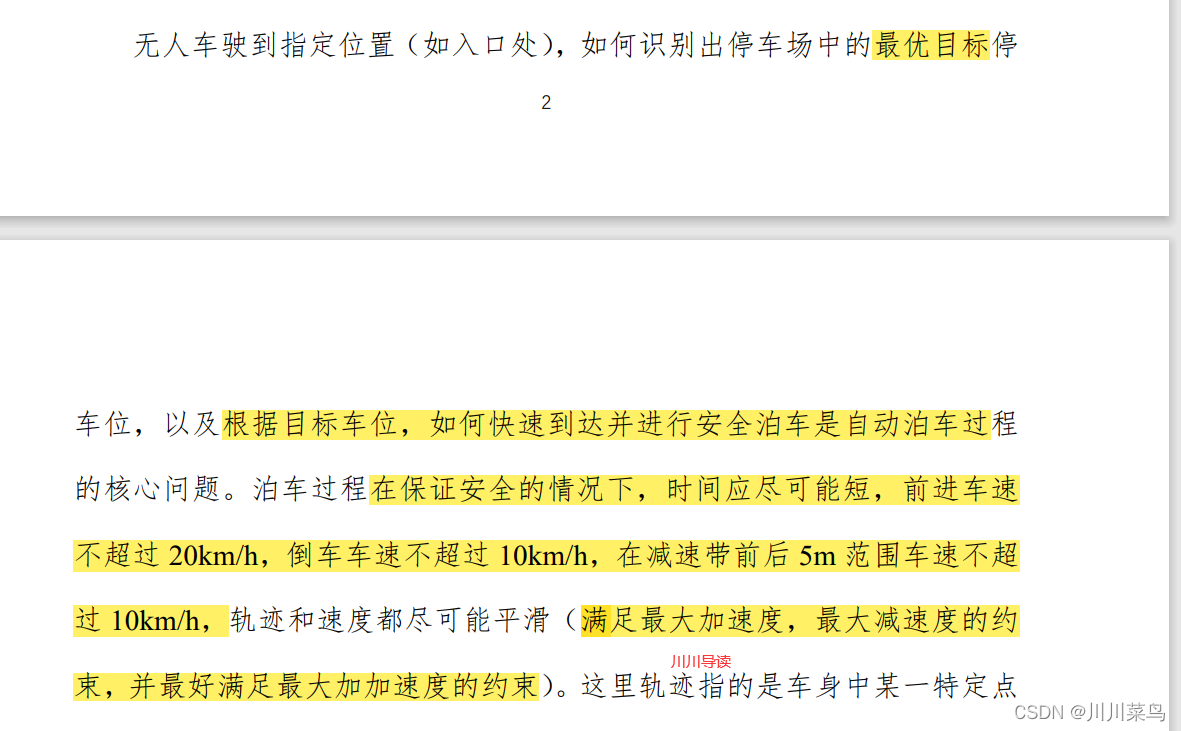
接着时停车的一些约束:
二、问题一
还真是个数学物理题,还请物理数学佬上车:
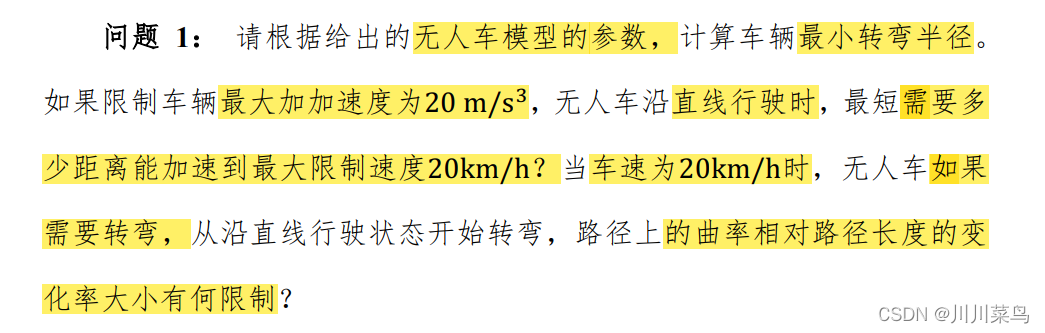
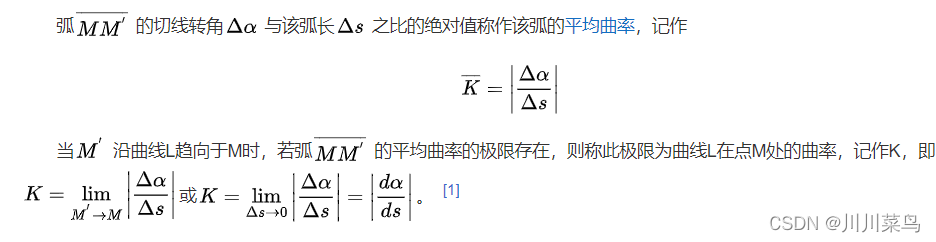
这里只说一下曲率,学过高数的人应该都知道,曲线的曲率(curvature)就是针对曲线上某个点的切线方向角对弧长的转动率,通过微分来定义,表明曲线偏离直线的程度。数学上表明曲线在某一点的弯曲程度的数值。
数学上的等价定义:
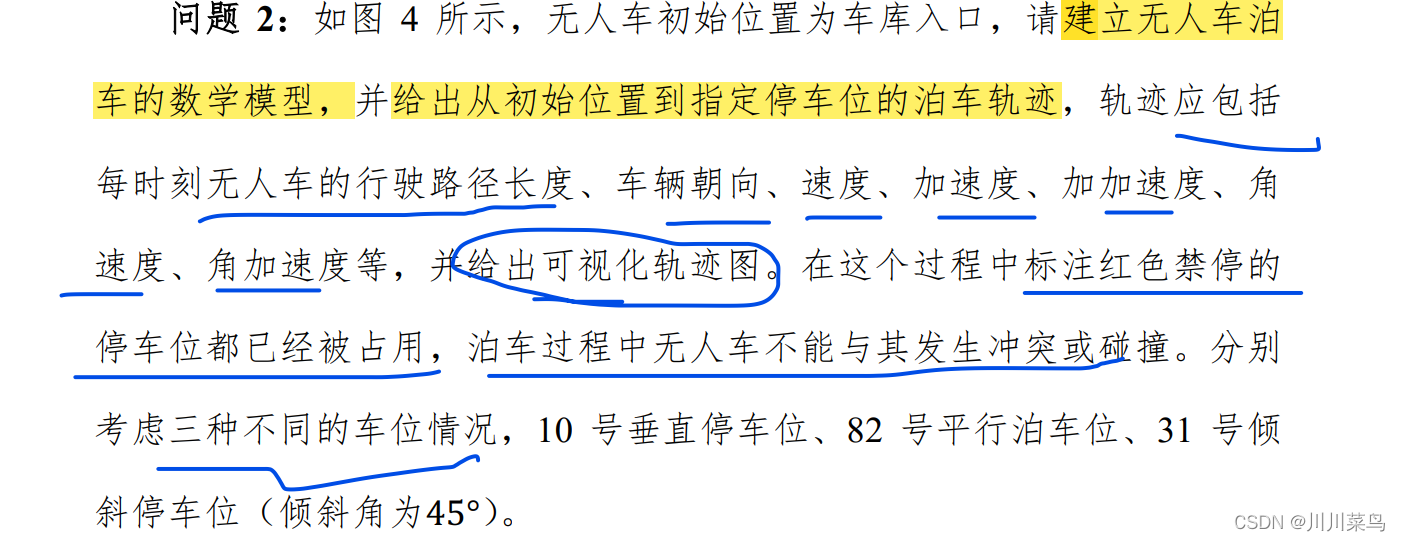
三、问题二
建立模型,绘制具体轨迹:
标准的禁止停车位置:
四、问题三
这个问题我认为应该分成两个部分,第一部分时解决现在的停车问题,第二问时通用,解决任意停车位被占用问题。

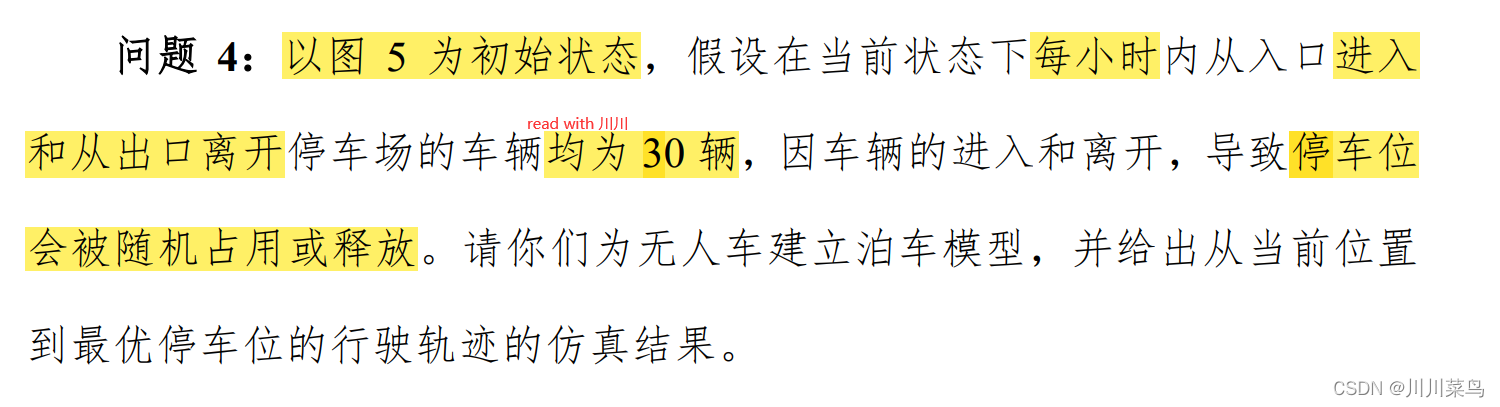
五、问题四
以图五为初始状态进行仿真:
六、可参考的重点
去年官方的题目A题:
可关注公众号:玩转大数据,点击:妈妈杯中C题下载2021题目和优秀论文。