1.概述
角点通常是目标轮廓上曲率的局部极大值,对掌握目标的轮廓特征具有决定性作用。通常认为角点是二维图像亮度变化剧烈的点,或两条线的交叉处。角点是一种局部特征,角落上的可区分性特别强,边缘次之,平滑区域则基本没有区分性,因此也不是重要的特征。
2.原理
角点原理来源于人对角点的感性判断,即图像在各个方向灰度有明显变化。算法的核心是利用局部窗口在图像上进行移动判断灰度发生较大的变化,所以此窗口用于计算图像的灰度变化为:[-1,0,1;-1,0,1;-1,0,1][-1,-1,-1;0,0,0;1,1,1]。人各个方向上移动这个特征的小窗口,如图3中窗口内区域的灰度发生了较大的变化,那么就认为在窗口内遇到了角点。如图1中,窗口内图像的灰度没有发生变化,那么窗口内就不存在角点;如果窗口在某一个方向移动时,窗口内图像的灰度发生了较大的变化,而在另一些方向上没有发生变化,那么,窗口内的图像可能就是一条直线的线段。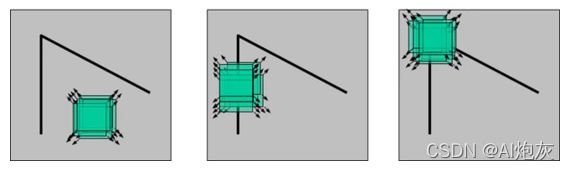
3.实战
void myFun::HarrisDetect(Mat& image)
{
Mat gray;
cvtColor(image, gray, COLOR_BGR2GRAY);
//计算Harris系数
Mat harris;
int blockSize = 2; //领域半径
int apertureSize = 3; //领域大小
cornerHarris(gray, harris, blockSize, apertureSize, 0.04);
//归一化便于进行数值比较和结果显示
Mat harrisn;
normalize(harris, harrisn, 0, 255, NORM_MINMAX);
//将图像的数据类型变为CV_8U
convertScaleAbs(harrisn, harrisn);
//寻找Harris角点
vector<KeyPoint>KeyPoints;
//寻找Harris
for (int row = 0; row < harrisn.rows; row++)
{
for (int col = 0; col < harrisn.cols; col++)
{
int R = harrisn.at<uchar>(row, col);
if (R > 125)
{
//向角点存入KeyPoint中
KeyPoint keyPoint;
keyPoint.pt.y = row;
keyPoint.pt.x = col;
KeyPoints.push_back(keyPoint);
}
}
}
//绘制角点与显示结果
drawKeypoints(image, KeyPoints, image);
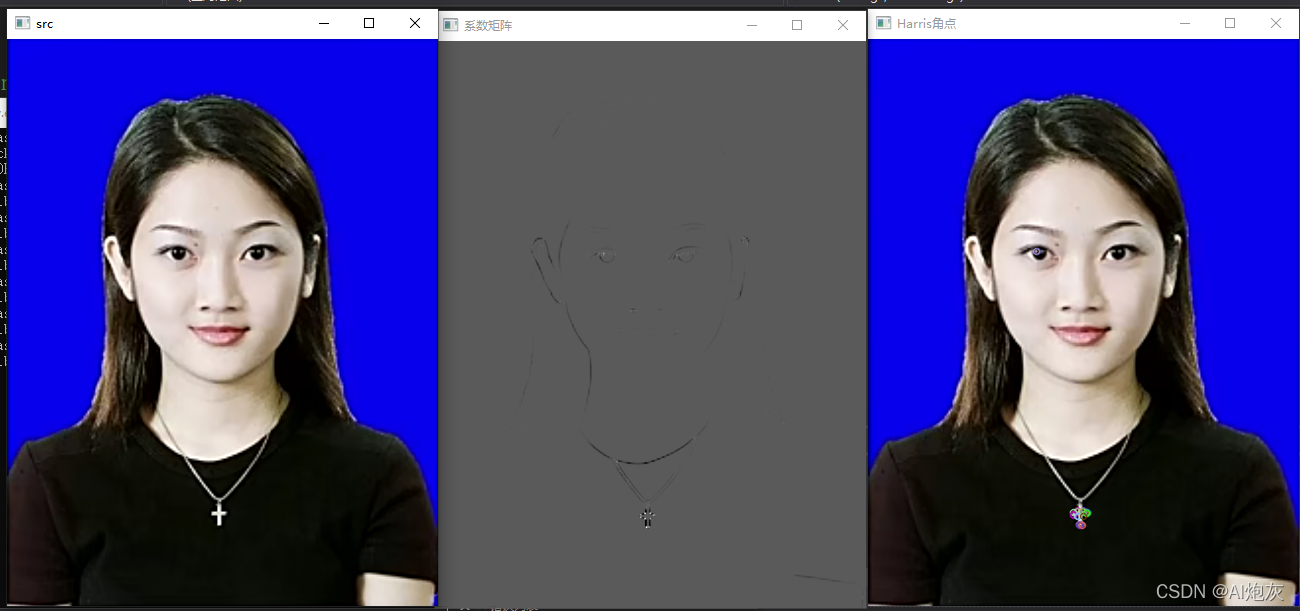
imshow("系数矩阵", harrisn);
imshow("Harris角点", image);
}检测结果如下所示: